РД 153-34.0-48.517-98
Российское Акционерное общество энергетики и электрификации
"еэс россии"
Департамент стратегии развития и научно - технической политики
ИНСТРУКЦИЯ ПО ЭКСПЛУАТАЦИОННОМУ ОБСЛУЖИВАНИЮ
СОВРЕМЕННЫХ СРЕДСТВ ПРИЕМА-ПЕРЕДАЧИ ТЕЛЕМЕХАНИЧЕСКОЙ
ИНФОРМАЦИИ ОПЕРАТИВНО-ИНФОРМАЦИОННЫХ КОМПЛЕКСОВ
НА ОБЪЕКТАХ РАО "ЕЭС России"
РД 153-34.0-48.517-98
УДК 621.311
Вводится в действие
с 01.02.2001 г
РАЗРАБОТАНО Открытым акционерным обществом "Фирма по наладке, совершенствованию технологии и эксплуатации электростанций и сетей ОРГРЭС"
ИСПОЛНИТЕЛИ Я.В. Лурье, B.C. Шилов
УТВЕРЖДЕНО Департаментом стратегии развития и научно-технической политики РАО "ЕЭС России" 04.03.98 г.
Первый заместитель начальника А.П. Берсенев
ВВЕДЕНО ВПЕРВЫЕ
В настоящей Инструкции отражены вопросы эксплуатационного обслуживания современных средств приема-передачи телемеханической информации оперативно-информационного комплекса на объектах РАО "ЕЭС России", которые позволят эксплуатационному персоналу эффективно эксплуатировать указанное оборудование. Приведены методы обслуживания и контроля телекомплексов и микроЭВМ: ГРАНИТ, РПТ-80, БЕСТА, ТК-113, МПТК.
Нормальная работа энергетических систем возможна только при наличии надежных средств диспетчерского и технологического управления, в состав которых входят системы телемеханики (СТ). В связи с этим к уровню технической подготовки производственного персонала, осуществляющего эксплуатацию средств телемеханики, предъявляются высокие требования.
В данной Инструкции приведены сведения по эксплуатационному обслуживанию современных телекомплексов (ТК) и микроЭВМ, которые должны помочь персоналу эффективнее эксплуатировать аппаратуру.
Под эксплуатацией сложной динамической системы, какой является современный ТК или центральная приемопередающая станция (ЦППС), следует понимать поддержание их в технически исправном состоянии. Этот непрерывный процесс состоит из различных мероприятий.
Все мероприятия, входящие в техническое обслуживание, можно разделить на три группы: контроль технического состояния, профилактическое обслуживание и текущее техническое обслуживание.
Контроль технического состояния - контроль работы ТК, локализации мест неисправности, исключение влияния случайных сбоев.
Профилактическое обслуживание - это мероприятия, направленные на поддержание заданного технического состояния ТК в течение определенного промежутка времени и продление его технического ресурса. Профилактические мероприятия можно в свою очередь разделить на две группы.
К первой группе относятся внешний осмотр, очистка, устранение дефектов, обнаруженных при осмотре.
Ко второй группе относятся контрольно-настроечные работы, проводимые на работающем ТК.
С точки зрения организации профилактического обслуживания наибольшее распространение получило планово-предупредительное обслуживание, основанное на календарном принципе. При этом составляется график проведения регламентных работ, в котором указываются объемы и сроки профилактических работ.
Текущее техническое обслуживание ТК - комплекс настроечных и ремонтных работ, направленных на восстановление свойств ТК или его работоспособности путем замены или восстановления его блоков, узлов, плат и т.п.
Организация эксплуатации ТК представляет собой комплекс мероприятий, направленных на подготовку обслуживающего персонала, планирование работ, своевременное и полное обеспечение требуемым ЗИП и расходными материалами, правильное и систематическое ведение документации и т.п. От уровня организации эксплуатации ТК и ЦППС в значительной степени зависит эффективность СТ.
Данная Инструкция предназначена для совершенствования эксплуатации современных интеллектуальных комплексов телемеханики (КТ).
Современные комплексы телемеханических устройств из-за их "интеллектуальности" имеют общую концепцию своей организации, что определяет примерно одинаковые для всех комплексов требования мер безопасности и порядка предварительной подготовки перед их включением в работу.
Учитывая данное обстоятельство, разделы приводятся в Инструкции один раз, а не повторяются для каждого комплекса отдельно.
Для каждого комплекса (и более подробно) излагаются их отличительные особенности и связанные с ними методы наладки и эксплуатации.
2. Телекомплекс гранит, краткая техническая характеристика
Телекомплекс четвертого поколения ГРАНИТ предназначен для передачи, приема, обработки и отображения информации в телемеханических АСУ ТП для энергетики и других отраслей промышленности.
Телекомплекс ГРАНИТ объединяет два типа устройств - телемеханические пункты управления (ПУ) и контролируемые пункты (КП).
В ПУ встраиваются две микроЭВМ, обеспечивающие программную обработку, прием, передачу и отображение телеинформации. Контролируемые пункты обеспечивают ввод, вывод, ретрансляцию от однотипных устройств телемеханики (УТМ) разнородной информации.
Возможно организовать связь между ПУ для создания на базе ТК ГРАНИТ многоуровневых иерархических систем. На каждом уровне иерархии к ПУ подключается оперативно-диспетчерское оборудование (ОДО) и (при необходимости) организуется связь с внешней ЭВМ или ПЭВМ.
Телекомплекс ГРАНИТ выполнен по магистрально-модульному принципу на базе ограниченного набора функциональных элементов (блоков) с унифицированными внутренними связями, регламентируемыми интерфейсом. Изменение видов, объемов информации и числа ПУ и КП достигается простым наращиванием числа и типов функциональных элементов и конструктивов.
В основу протокола передачи информации по каналам связи положен принцип временного разделения и групповой (кадровой) передачи информации.
2.1. Организация микроЭВМ, применяемой в составе ТК ГРАНИТ
Машина имеет магистрально-модульный принцип построения на основе унифицированного интерфейса.
Центральный процессор | Система памяти | Внешние устройства |
Все функциональные блоки выполняются в виде модулей со стандартным набором связей, объединение которых в систему осуществляется через общую шину с мультиплексированной магистралью адреса/данных. Процессор адресует 216 ячеек памяти. Минимальной адресуемой единицей является байт. Совокупность двух байтов, начинающаяся с четного адреса, представляет слово.
Старший байт | Младший байт | Старший | Младший | 000000 | |
15… 8 | 7… 0 | Младший | 000002 | ||
Номера битов | Старший | 177774 | |||
Старший | Младший | 177776 | |||
Таким образом, процессор адресует 64 кбайт или 32 кслов информации.
Адресное пространство микроЭВМ делится на 8 блоков по 4К слов в каждом. В первом блоке находятся векторы прерываний, а в последнем - адреса регистров ввода-вывода.
Каждый вектор прерывания занимает два слова, в первом хранится начальный адрес установки счетчика команд (после прерывания), а во втором - код установки регистра состояния (RS).
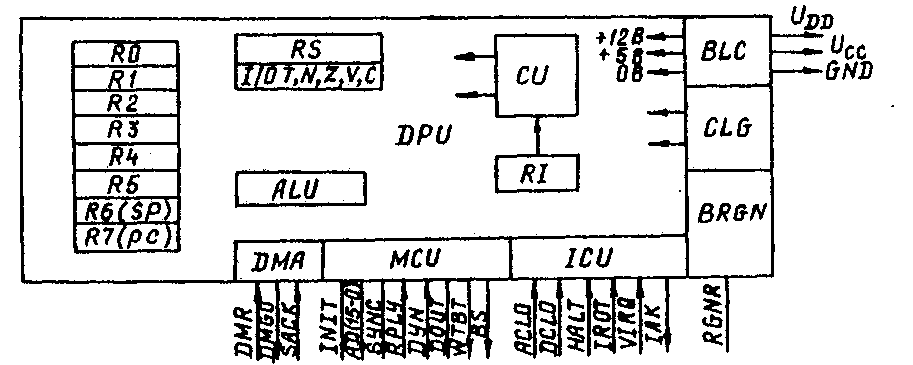
В состав логического символа процессора входят: восемь регистров общего назначения (RO-R7), среди которых R6 играет роль указателя стека (SP), a R7 - счетчика команд (PC); регистр состояний (RS), включающий признаки: N - знака, Z - нуля, V - переполнения, С - переноса, Т - разряда слежения, I/O - приоритета программы, арифметико-логическое устройство (ALU); устройство управления (CU) с регистром команд (RI); устройства управления магистралью (MCU) с прямым допуском к магистрали (DMA); прерывания (ICU); блок питания (BLC); генератор синхронизации (CLG); блок управления регенерацией динамической памятью (BRGN).
Адрес, по которому выполняется выборка или запись слова в стек по SP, называется вершиной стека. Для указания области начала стека программист перед выполнением программ должен установить содержимое R6 (SP); при записи в стек процессор уменьшает содержимое SP на два, а затем записывает новый элемент в стек; при выборке из стека выбирается элемент, а затем SP увеличивается на два.
2.2. Методика работы с блоком внешнего запоминающего устройства (ВЗУ)
Блок ВЗУ состоит из четырех типов субблоков ПП-011, ПП-012, ПП-013, ПП-014. Субблок ПП-011 (один) устанавливается в разъем каркаса микроЭВМ. Остальные субблоки размещены в отдельном блок-каркасе. Связь между субблоками ПП-011 и ПП-012 осуществляется с помощью плоского жгута.
Адреса обращения микроЭВМ к блоку ВЗУ:
173100, 173102, 173104, 173106.
Программное обеспечение (ПО) в виде файлов записано на платах ПП-013. На одной плате находится 16 микросхем постоянного перепрограммируемого запоминающего устройства (ППЗУ) типа К573РФ2, каждая из которых - 2 кбайта. На объем памяти с адресами от 0 до 77768 включительно требуется 2 микросхемы. В одной записан младший байт слова, в другой - старший. На дисплей слово выводится для чтения восьмеричным кодом (шесть разрядов).
Проверка блока ВЗУ типа ПП-01
1. Проверяемую плату ПП-013 установить на переходной жгут-удлинитель. Плата может устанавливаться на одно из четырех мест блок-каркаса:
4-я | 3-я | 2-я | 1-я | 1-я | 0-я | 1-я | 0-я | свободное | |
ПП | ПП | ПП | ПП | ПП | ПП | ПП | ПП | место | ПП |
014 | 014 | 014 | 014 | 013 | 013 | 013 | 013 | 012 | |
1-й блок | 0-й блок | ||||||||
2. Плату с ППЗУ типа ПП-013 с тестами установить в 0-й блок, 0-я плата, а проверяемую - в 1-й блок, 0-я плата.
Запустить тест ППЗУ: RU TVZU ВК
пробел клавиша
Далее с дисплея провести диалог с микроЭВМ.
Выбрать тест ППЗУ, 1-й блок, 0-ю плату (в блоке она 1-я) и нажать клавишу 2, т.е. выполнение теста.
МикроЭВМ через платы ПП-011, ПП-012 "посылает" к плате ПП-013 сигналы (импульсы) чтения, записи, данные и адреса ячеек ППЗУ. Если никаких импульсов нет, следует:
проверить контакты в разъеме платы ПП-011;
проверить контакты в жгуте, соединяющем ПП-011 и ПП-012;
последовательно заменить платы ПП-011, ПП-012, ПП-013.
При работе теста на экране дисплея последовательно указывается адрес ячейки, в которую обеспечивается возможность записи и чтения. Адреса ППЗУ на плате ПП-013 распределяются следующим образом:
Старший байт | Младший байт | Адреса для 0-й платы | Адреса для 1-й платы |
0-77768 100008-177768 200008-277768 300008-377768 400008-477768 500008-577768 600008-677768 700008-777768 | 1000008-1077768 1100008-1177768 1200008-1277768 1300008-1377768 1400008-1477768 1500008-1577768 1600008-1677768 1700008-1767768 |
Пока тест "обслуживает" адреса от 0 до 7776 на выходе микросхемы Д7 (ножка 9) или микросхем Д11, Д12 (ножка 20) должен наблюдаться импульс, частота появления которого соответствует частоте записи очередной строки на дисплее. Пользуясь ждущей внутренней разверткой осциллографа, можно наблюдать факт наличия развертки луча (а не обязательно сам импульс).
Следует убедиться в наличии импульсов на всех ППЗУ по мере увеличения адресов обращения к ППЗУ. Возможны случаи непропаянных ножек подсхемников для ППЗУ.
Чтобы перейти к очередной паре ППЗУ, нужно:
нажать кнопку на блоке Р-25 пульт/программа, т.е. остановить тест;
записать в регистр RO (R1) новый адрес;
нажать клавишу Р (лат.) на клавиатуре дисплея.
Тест будет продолжен с нового адреса.
Одновременно с проверкой исправности микросхемы Д7 проверяется наличие импульсов на выходе Д8 (или 18-й ножке ППЗУ).
Далее следует проверить исправность четырех шинных формирователей Д1-Д4. Если гарантированно стереть все ППЗУ ультрафиолетовым излучением, то последовательно во всех адресах должны "читаться" только "1".
Наличие в каком-либо разряде постоянного "0" по всем адресам свидетельствует о неисправности шинного формирователя Д1-Д4 (тип К589АП26).
Чтобы определить, какой именно формирователь неисправен, следует определить номер разряда по слову, читаемому из ППЗУ.
Если ППЗУ читается правильно, но при нажатии кнопки "PGM" на плате (эта кнопка подает 25 В на 21н всех ППЗУ) один бит в слове выставляет "0", то возможная причина - неисправное ППЗУ.
Таким образом, прежде, чем приступить к записи программ, необходимо проверить исправность всех элементов платы ПП-013 (при условии исправности ПП-011, ПП-012).
Для того, чтобы прочитать слово (два байта) следует провести с дисплея (консоль) следующие операции:
Открыть ячейку регистра состояния платы ПП-011 173100/000200 1 "ПС",
где 173100/ - это печатает оператор;
000200 - печатает ЭВМ в ответ на /;
1 - печатает оператор, т.е. в данном случае выбран номер блока 1;
"ПС" - клавиша "ПС" на клавиатуре.
После нажатия "ПС" в регистр состояния записана 1 (000200 означало, что регистр был "готов" принять команду), далее открывается регистр для записи адреса ячейки:
173102/000002 "ПС",
где 000002, например, - адрес ячейки 000002.
После нажатия "ПС" в регистр адреса записан адрес и ЭВМ выводит регистр записи:
173104/
Если оператор запишет число в этот регистр и нажмет "ВК", то по выбранному адресу будет записано число, указанное в регистре 173104/число ВК. Для этого нужно, чтобы ячейка была подготовлена для записи, т.е. в ней было 1777778 и предварительно нажата клавиша "PGM" на плате ПП-013, в которую производится запись.
Если же оператор не будет записывать в регистр 173104, а нажмет "ПС" (а не "ВК"), то откроется регистр чтения 173106/число.
По окончании следует нажать "ВК".
2.3. Блок системной централи (СЦ)
Контроллер связи радиальный (КСР) обеспечивает связь микроЭВМ с функциональными элементами телекомплекса в составе аппарата ПУ.
Конструктивно КСР состоит из пяти субблоков, устанавливаемых в компоновочный каркас (КК), и одного субблока КС52.31.6, вставляемого в "корзину" ЭВМ.
Контроллер работает в следующих режимах:
передача информации из ЭВМ и запись в буфер системной централи (СЦ);
считывание информации из буфера СЦ и передача ее в один из каркасов с функциональными блоками (ФБ);
опрос состояний КК на предмет наличия информации для съема;
прием информации из КК и запись ее в буфер СЦ;
считывание информации из буфера СЦ и передача ее в ЭВМ.
Количество КК от 1 до 16. Скорость обмена информацией между ЭВМ и КСР - 20000 слов в секунду. Скорость передачи/приема информации в/из КК - 18000 Бод. Емкость входного и выходного буфера 32 байта.
Основные приемы обслуживания блока СЦ
Плата КС52.31.6, установленная в "корзину" ЭВМ, должна проводить все операции в режимах, указанных выше, через регистр команд/состояния 175770 и регистр данных 175772. Оператор печатает на дисплее адрес указанного регистра команд 175770/. Если появляется/?, то либо какая-то плата "портит" шину, либо плохо вставлена плата КС52.31.6, либо неисправна эта плата. Как и во всех случаях, нужно разгрузить "корзину" от других плат и от жгута, соединяющего плату КС52.31.6 с блоком СЦ.
Неисправный блок в составе КС52.31 следует определить, последовательно заменяя блок за блоком на заведомо исправный.
Ремонт субблока проводить, изучив принципиальную схему СЦ по заводскому описанию.
Некоторые понятия
Ввод информации в ЭВМ и вывод ее из ЭВМ может происходить как по прерыванию, так и по флагу готовности. При работе по прерыванию ЭВМ должна выдать разрешение прерывания, установив соответствующий разряд согласно табл. 1. При этом на соответствующих выходах регистра разрешения прерываний Д14 (микросхема В5/ножки 2, 7, 10, 15) появится сигнал "1". Далее сигналы готовности из СЦ взводят триггер Д18.1 (микросхема Б3/ножка 5) - требование прерывания (ТПР) в ЭВМ. В ответ ЭВМ выставляет сигнал "К ВВОД Н" и "К ППР (1) Н". При этом взводится триггер Д18.2 (БЗ/9) и сбрасывается Д18.1. Элементом Д27.2 (А2/6) запрещается распространение сигнала предоставления прерывания "К ППР (0) Н". Одновременно элементами Д17 (Е2/6, Е2/8), Д27.4 (А2/12), Д28 (В2, ножки 3, 6, 9, 12) формируется вектор прерывания согласно табл. 2.
Таблица 1
Разряд | Назначение разряда в регистре команд/состояние РгК |
0-1 | Код управления мультиплексором СЦ (табл. 3) |
2 | Ввод данных из СЦ |
3 | Ввод данных из ММО |
4 | Вывод данных в СЦ |
5 | Вывод данных в ММО |
6 | Конец ввода из СЦ |
7 | Конец вывода в СЦ |
8 | Разрешение прерывания по готовности ввода из СЦ |
9 | Разрешение прерывания по готовности ввода из ММО |
Таблица 2
Требование прерывания | Вектор |
Готовность ввода в СЦ | 200 |
Готовность приемника ММО | 204 |
Готовность ввода из ММО | 214 |
Готовность ввода из СЦ | 234 - самый высокий приоритет |
Таблица 3
Значение разряда | Вводимые в ЭВМ данные | |
1-й разряд | 0-й разряд | |
0 | 0 | Первое слово состояния (СС-1) |
0 | 1 | Второе слово состояния (СС-2) |
1 | 0 | Данные из системной централи СЦ |
1 | 1 | Данные из ММО |
2.4. Контроллер внутриблочной магистрали (КВМ) (КС59.10.1, 2, 3)
Алгоритм обмена информацией (сигналами) между ФБ и КВМ.
Если ЛУ0 готов принять данные от ФБ каркаса КК, т.е. он выставил сигнал ГПР ЛУ0 (при этом он не выставил готовность передать данные в сторону ФБ, которому отдан приоритет, и это не случай магистрального канала), то КВМ последовательно с частотой 72 кГц "обегает" ФБки и анализирует от них сигналы ГПР и ГПД. Для этого КВМ выставляет по индивидуальным шинам сигналы АФБх = 1 и общий сигнал "опрос готовности" (ОГ).
Внимание! Если один и тот же ФБ в одном месте КК не работает, а в другом работает, то следует проверить сигнал АФБХ от КВМ. Возможно имеет место повреждение выхода микросхемы в КВМ.
Если обнаружен сигнал ГПР = 1 от ФБ, то КВМ дает в ЛУ0 АФБ ЛУ0 = 1 и тактовые импульсы ТИ ЛУ0 = 1, включает кодер, формирует байт МКП (адресный байт, который определяется перемычками на ряде зажимов), формирует байт из четырех старших разрядов 1000-ГПР и четырех младших разрядов - двоичный код N ФБ, от которого поступил сигнал ГПР, далее формирует два байта, в котором код N ФБ, от которого поступил ГПР=1 в КК, показан не двоичным кодом, а распределительным и, наконец, два байта кода КПК, которые представляют собой результат деления всего выданного кода (начиная от NКП) на полином 16-й степени. После выдачи 2-го байта КПК КВМ снимает сигналы АФБ ЛУ0 и ТИ ЛУ0' приводит в исходное состояние шины КОМ и возвращается в начало.
Из выше приведенного описания следуют рекомендации: если номер контролируемого пункта выдается неверный, то необходимо проверить правильность установки перемычек на ряде зажимов (но не исключено также повреждение микросхемы);
если не соблюдается последовательность взаимодействия сигналов, то можно оценить, какой из ФБ неисправен, т.е. ЛУ0' КВМ или ФБ, либо общая шина, на которую работают все ФБ. В этом случае нужно "разгружать" шину последовательно, выставляя другие ФБ из КК.
2.5. Ориентация в программном обеспечении ТК ГРАНИТ
При нажатии кнопки "сброс" (красная кнопка на фасаде ФБ типа Р-25) программный счетчик процессора микроЭВМ устанавливается на адрес 1730008 и начинается выполнение блока команд, в результате чего в оперативную память загружается программа начальной загрузки, которой передается управление.
Адрес 1730008 - это адрес в ПЗУ, размещенном на интерфейсной карте ПП-011. Карта вставлена в каркас микроЭВМ, через нее (карту) реализована связь ЭВМ с внешней памятью ВЗУ, на платах (ПП-013) которого записано все базовое программное обеспечение (БПО).
Если загрузка не начинается вообще, то следует с дисплея обратиться по адресу 173000/... ВК. При ответе в виде знака ? нужно заменить плату ПП-011 (или проверить установку ее в разъем). Возможно, что какая-либо интерфейсная карта в каркасе ЭВМ неисправна и "портит" общую шину микроЭВМ. Для поиска последовательно разгрузить каркас ЭВМ, оставляя только ПП-011.
В случае отсутствия всякой реакции на нажатие кнопки "сброс" на Р-25 следует заменить ФБ Р-25.
Программа начальной загрузки загружает в ОЗУ микроЭВМ программные модули в соответствии с картой загрузки GRANIT. Названия загружаемых модулей во время загрузки появляются на экране дисплея-консоли.
Порядок загрузки следующий:
SPR - операционная система;DVR-01 - драйвер системного терминала (консоли);
DVR-02 - драйвер дисков НГМД;
DVR-07 - драйвер ВЗУ;
DVR-08 - драйвер системной централи, т.е. ФБ, связывающего микроЭВМ со всеми КК;
DVR-09 - драйвер передатчика канала ММО;
DVR-10 – драйвер приемника канала ММО;
DVR-11 – драйвер удаленного диспетчерского дисплея;
DФA - программа диспетчер функционального адреса;
TIT – программа обработки текущих телеизмерений;
ТII - программа обработки интегральных телеизмерений;
TS - программа обработки телесигнализации;
IS - программный интерфейс связи программных модулей;
INIT - программа для ММО;
LOADR - перемещающий загрузчик;
CTI - программа для управления технологической информацией на диспетчерском дисплее;
BCIP - программа для вывода "бегущей строки;
TU - программа организации посылок телеуправления (ТУ);
DPTU - программа, обеспечивающая ТУ с диспетчерского дисплея;
SUF - система управления файлами;
DS - диспетчер локальной сети (для диспетчеризации отправления посылок от ПУ к КП).
Далее формируется системно - распределенная область, таблица прерываний, в которой каждому "вектору" ставится в соответствие адрес описателя задачи (программы) или адрес секции продолжения драйвера, генерируются телемеханические таблицы, отводится место в оперативном запоминающем устройстве (ОЗУ) под текущую телемеханическую базу, выводятся на консоль слова:
ОС РВ ГРАНИТ В01, а на дисплей диспетчера - слово RESTART.
Далее загружается программа - Клавиатурный монитор (КМ), открывается прерывание СЦ и если есть на ВЗУ файл BAZA.MIC, то через СЦ производится обращение к каждому линейному узлу, указанному в базе. Принимаемая информация от КП записывается в ОЗУ микроЭВМ и на ВЗУ на VZ в файл BAZA.TAB. (При отсутствии на ВЗУ файла BAZA.MIC об этом выводится сообщение на консоль). Далее управление передается клавиатурному монитору, который выводит на терминал (консоль) знак точки ".".
В процесс загрузки операционной системы (ОС) реального времени (РВ) ГРАНИТ могут на системном терминале появляться сообщения о том, что та или иная программа не загрузилась в ОЗУ, т.е. в соответствии с картой загрузки GRANIT программа должна загружаться в ОЗУ микроЭВМ, а она не загрузилась.
Причиной такого сообщения чаще всего является искажение программы на ВЗУ. Программа может загружаться с ППЗУ PZ: (платы ПП-013) или памяти VZ: (платы ПП-014). Поскольку приоритет при загрузке отдан памяти VZ:, следует удалить имя файла PZ: программой PU в POFe, а затем скопировать тот же файл с диска на VZ программой CF в POFе. После этого вновь повторить загрузку всего БПО в ОЗУ (нажатием кнопки "сброс").
Те же действия придется проделать с файлом на PZ:, но для записи на PZ нужно иметь свободное место достаточного объема, иначе стирать все файлы и записывать их заново крайне трудоемко. Чтобы этого не делать, следует обеспечить платы VZ: (ПП-014) непрерывным электропитанием от батареи постоянного тока.
При загрузке файлов с НГМД возможен случай, когда обращение к диску происходит, а загрузка не производится. Причиной такого явления может быть неисправность платы ПП-014 (VZ:), на которой находится файл DISK для загрузки с НГМД.
Возможно, что после загрузки на системный терминал будет выведено сообщение:
ССТ ОШ. обл 5
Это происходит потому, что в файле BAZA.MAC указана длина области 5, превышающая объем памяти ОЗУ, оставшейся свободной после загрузки системы и задач первого типа. В этом случае нужно либо исключить из карты загрузки ненужные программы, например, DVR09, DVR10, обслуживающие ММО, либо свести область 5 в BAZе.MAC до 0.
Если при обращении к ВЗУ возникает ошибка, на системный терминал выводится сообщение:
ССТ ОШ ВЗУ ZZZZZ,
где ZZZZZ - код ошибки.
При формировании телемеханических таблиц на ВЗУ типа VZ: могут возникать ошибки при записи числа. В этом случае выводится сообщение:
АД NNNNNN ЗП LLLLLL ЧТ ММММММ,
где NNNNNN - адрес на VZ: в восьмеричном коде;
LLLLLL - записываемое число в двоичном коде;
ММММММ - читаемое число в двоичном коде.
Для исключения таких ошибок перед загрузкой ОС РВ следует провести тестирование плат VZ: (ПП-014) и PZ: (ПП-013) (последние следует тестировать до записи на них программных модулей).
Продолжение раздела ориентация в БПО ГРАНИТ
В состав операционной системы входит супервизор программ, который выполняет обработку вызовов супервизора от других программ. Обработать вызов - это значит связать любую выполняющуюся программу с ядром операционной системы.
Когда происходит прерывание по 200-му вектору - это прерывание от СЦ. Из ячейки 200/адрес выбирается адрес, в котором записан супервизор SPR. Этот адрес всегда 150008. Супервизор SPR запускает программу - Диспетчер функционального адреса (DFA), которая предназначена для инициализации программ обработки и отображения телемеханической информации по получении посылки соответствующего функционального адреса из СЦ (т.е. от аппаратов КП).
Программа DFA закрывает все прерывания и запускает драйвер DVR08, обеспечивающий работу с СЦ для приема информации, поступившей от КК. Производится чтение информации из регистра данных СЦ (его адрес 175772). Считывание производится всей посылки в промежуточный буфер. Затем управление возвращается обратно DFA. Если задача TS для обработки такого типа данных (телесигнализация) свободна, то ей передается управление (т.е. она вызывается) и DFA завершает работу.
Программа TS выполняет следующие функции:
записывает значения телесигналов в текущую телемеханическую базу (размещенную в ОЗУ, ее начальный адрес записан в ячейке 470/адрес текущей телемеханической базы);
передает информацию для отображения на платах, установленных в КК для отображения на щите и для отображения в технологических кадрах (в последнем случае вызывается программа BCIP);
выдает значения телесигналов на программный интерфейс IS;
подсчитывает суммарное время простоя оборудования на стороне КП;
подготавливает квитанцию о приеме телесигналов;
выдает значения телесигналов по запросам от других задач;
сравнивает телесигналы с BAZA.TAB. При наличии расхождений производит запись новых ТС в BAZA.TAB.
2.6. Создание новых файлов и коррекция существующих в ОС РВ ГРАНИТ
Для создания новых файлов следует воспользоваться дискетой с операционной системой "ФОДОС", создать в этой системе файл, а затем перевести его в операционную систему "ОС РВ ГРАНИТ".
Загрузка системы "ФОДОС"
Загрузить систему "ФОДОС" в инструментальную ЭВМ МС12.01.02. Обычно для этой цели используется одна из двух ЭВМ ПУ ГРАНИТ.
Порядок действий:
нажать и отпустить кнопку пульт/программа инструментальной ЭВМ, на экране консоли должна быть буква "G";
нажать на клавиатуре консоли букву "В" лат.; должен быть ответ на дисплее
печатать на клавиатуре консоли: MXU (ноль) при условии, что дискета с системой "ФОДОС" вставлена в дисковод 0 (левый накопитель). Предварительно НГМД должен быть включен, при этом на фасаде должны гореть четыре светодиода.
После обращения через интерфейс к НГМД (слышны щелчки в дисководе) на экране консоли сообщается о загрузке ФОДОС и запрашивается ДАТА;
тире | тире |
следует ввести дату в виде: 07 - 02 | - 97 ВК; |
число месяц | год клавиша |
следует нажать клавишу "ВК" на остальные запросы.
следует нажать клавишу ''ВК'' на остальные запросы.
После появления на экране дисплея-консоли точки "." система "ФОДОС" готова к работе.
Клавиша "ТАЙМЕР" на плате управления ЭВМ (блок Р-25) должна быть отжата при работе с системой "ФОДОС".
Для создания нового кадра или корректировки существующего следует:
вызвать каталог дискеты с ФОДОС. Для этого печатать:
DIR
убедиться в том, что в каталоге есть редактор ТЕД;
убедиться, что в каталоге есть файл кадра, который подлежит корректировке;
посмотреть по каталогу, если создается новый файл, чтобы на дискете было достаточно свободного места <FREE>?;
вызвать (загрузить) редактор ТЕД, для чего печатать:
R ТЕД
пробел
нажать "УПР-С" после появления на экране приглашения к работе в виде ">", на экране появится приглашение к экранному (текстовому) редактору;
создать кадр, работая на клавиатуре с русским текстом.
Кадры могут быть:
м обязательная буква | 16. номер | MAC обязательное расширение МАС | - наименования объектов подстанции. Желательно присваивать номер (16) тот же, что и у линейного узла в КК (номер КП); |
FTS | 16 | MAC | - кадр с наименованиями для бегущей строки на экране диспетчерского дисплея. Создается отдельно для каждой подстанции; |
FTU | MAC | - кадр для телеуправления объектами. При включении новой подстанции этот файл дополняется, для него требуется большой объем свободной области на дискете; | |
МО | MAC | - нулевой кадр с наименованиями подстанций и соответствующими им номерами кадров; | |
BAZA | MAC | - информационная база, в которой указаны сведения об объемах и другая информация для каждой подстанции; |
перевести редактор в командный режим, поскольку все виды кадров уже созданы. Для этого повторно нажать клавиши «УПР+С» и получить на экране ''>'', т.е. приглашение к вводу команды;
вызвать с дискеты в ОЗУ созданный кадр:
R | М16 | МАС | ||
пробел | или другой номер, 16 – это пример |
вновь нажать клавиши "УПР+С" после загрузки, на экране появится вызванный кадр;
изменить его, т.е. допечатать новые названия, дополнить и т.п.;
записать новый кадр на дискету:
W | М17 | МАС | ||
№ новый |
таким же образом действовать при редактировании других видов файлов.
Перевод кадра или файла из системы "ФОДОС" в систему "ОС РВ ГРАНИТ"
Загрузить систему "ОС РВ ГРАНИТ" и далее провести диалог оператора с ЭВМ:
нажать клавишу "ТАЙМЕР" на пульте управления ЭВМ, в которую была загружена система "ФОДОС";
напечатать на клавиатуре консольного дисплея:
R Z
На экране появится G14536
вытащить дискету ФОДОС и вставить дискету ОС РВ ГРАНИТ в тот же накопитель. Желательно, чтобы на этой дискете не было файла BAZA.MIC;
нажать на клавиатуре букву "Р" (лат.). На экране будет информация о загрузке файлов ОС РВ ГРАНИТ. Первым загружается операционная система SPR. В конце загрузки на экране появится точка ".";
воспользоваться программой обслуживания файлов POF и ее функциями для перевода файла из системы "ФОДОС" в систему "ОС РВ ГРАНИТ";
печатать RU РОР (в системе ОСРВ пробел вводится автоматически);
ответ ЭВМ на дисплее POF?
установить дискету с ФОДОС в накопитель I (правый) (нужно быть уверенным, что он исправен!) и вызвать функцию FF:
FF | ВК |
ответ ЭВМ: печатать: | параметры FF |
Д0:16.МАС=Д1:М16.МАС
ОС РВ ГРАНИТ ФОДОС
(в системе "ФОДОС" название кадра начинается с М16 а в системе "ОС РВ ГРАНИТ" - с цифры 16).
В системе "ОС РВ ГРАНИТ" накопитель называется для функций POF – Д0 или Д1, а в системе "ФОДОС" – МХ0 или МХ1;
отказаться от функции FF нажатием клавиши "ПС".
В ответ ЭВМ выдаст: функция POF?
Для ухода в точку "." нажать "УПР+С", т.е. две клавиши.
Также действовать и с другими видами кадров.
Создание файла FTS16.MIC из FTS16.MAC,
т.е. рабочего файла для бегущей строки
Для создания файла FTS16.MIC из FTS16.MAC в системе "ОС РВ ГРАНИТ" на дискете должна быть программа REDT - редактор файлов имен:
печатать: RU REDT
ответ ЭВМ: имя файла?
печатать: Д0:FTS16.MAC
этот номер для примера везде указан
ответ:
1 – ТС
2 – ТИТ
3 – ТИИ
печатать: 1 ВК
Символьный файл FTS16.MAC считывается с диска системой "ОС РВ ГРАНИТ", преобразовывается и записывается на СЗУ VZ как FTS16.MIC.
По окончании преобразования, если в исходном файле FTS16.MAC нет ошибок, на дисплей выводится сообщение:
ИМЯ ФАЙЛА?
Если ошибки имеют место, то сообщение:
ошибок ХХХХ
в строках ХХХХ, ХХХХ, ХХХХ
файл FTS16.MIC создается на VZ, если предварительно там такого файла нет. В противном случае его нужно уничтожить функцией PU программы POF;
после создания на VZ файла FTS16.MIC, пользуясь функцией CF копирования файлов программы POF, скопировать новый файл на Д0 или Д1 в дискету с ОС РВ
Д0: FTS16.MIC = VZ:FTS16.MIC
или в Д1: (тогда в накопитель Д1 поставить дискету с ОС РВ).
Примечание. При создании символьного файла в системе "ФОДОС" FTS16.MAC руководствоваться примером:
Пример:
/Чирково ОД 110 кВ/ | 12 | 0 | 015:Z,P,1 | ||
№ КП | пробел | № группы, в которой находится ТС | № ТС в вгруппе |
где Z - признак вывода бегущей строки со звуковым сигналом;
Р - вывод на печать (номер канала печати берется из базы);
1 - номер диспетчерского дисплея, на который выводится строка (счет от 0 до 7).
В названии следует указать наименование подстанции.
Каждая вводимая строка должна иметь телемеханический адрес больший, чем предыдущая строка.
2.7. Поиск причины сбоя программы в условиях эксплуатации
Для каждой задачи, загруженной в ОЗУ, программа "LOADR" формирует описатель задачи (ID); его адрес можно узнать с помощью "RS" функции клавиатурного монитора. Пользуясь этой функцией, следует переписать состояния всех задач, пока система выдает точку, с тем, чтобы ориентироваться в поиске причины выхода из точки. Для поиска в ОЗУ ID сегмента оператор печатает: RS имя задачи ВК
ЭВМ печатает состояние задачи, т.е. поиск в ОЗУ ID сегмента указанной задачи, на экран дисплея выдаются адрес ID сегмента, точка запуска задачи, тип задачи, приоритет и адрес стека.
Описатель задачи имеет следующий вид:
Восьмеричный код номера слова по порядку в описателе | Что слово обозначает | Кем заполняется L - LOADR перемещающий загрузчик |
1-е слово | Это адрес описателя следующей задачи | D - диспетчер задач |
2-е слово | Имя задачи (первые 3 символа) | D L |
3-е слово | Имя задачи (вторые 3 символа) | L |
4-е | Точка (адрес) запуска задачи | L |
5-е | Точка (адрес) приостанова задачи | L |
6-е | Тип задачи Приоритет | L |
7-е | Слово состояния задачи | D |
8-е | Адрес вершины стека | D |
При работе системы задачи располагаются в оперативной памяти ОЗУ и на ВЗУ.
Диспетчер задач обслуживает пять типов задач, которым соответственно отводится пять областей ОЗУ.
Адреса загрузки и длина областей ОЗУ для каждого типа задач находятся в системно распределенной области в следующих ячейках:
ТИП2: 362 | ТИП | В этой области могут находиться задачи, не относящиеся к другим типам | ||
364 | Адрес загрузки | |||
366 | Длина области в байтах | |||
ТИП3: | 370 | ТИП | В этой области загружаются сервисные системные задачи | |
372 | адрес загрузки | |||
374 | длина области в байтах | |||
ТИП4: | 376 | ТИП | Данная область резервируется за системой | |
400 | адрес загрузки | |||
402 | длина области в байтах | |||
ТИП5: | 404 | ТИП | В этой области могут находиться задачи, не относящиеся к другим типам | |
406 | адрес загрузки | |||
410 | длина области в байтах | |||
Имея в виду вышеуказанные сведения о задачах (их адреса загрузки) после останова системы на каком-либо адресе (на консольном дисплее @ адрес), можно определить, во время выполнения какой именно задачи произошел останов. Далее следует обратиться к адресу, расположенному выше адреса останова на несколько команд, и, читая команды в машинных кодах, определить причину останова.
Например, было обращение к какому-либо регистру интерфейсной платы или ВЗУ, а ответа не последовало. Следовательно, нужно заниматься соответствующей интерфейсной картой и блоком, с которым она связана.
2.8. Проведение частичных и полных проверок
Систематический контроль за работой ТК ГРАНИТ предусматривает:
ознакомление с записями в журнале неполадок;
ежедневный внешний осмотр. В это понятие входит: контроль наличия "точки" на экране консольного дисплея; контроль времени, выводимого на экран дисплея (функция ТТ);
проверка вызова нескольких кадров с диспетчерского дисплея или ПЭВМ;
посылку команды "OPROS" с консольного дисплея с контролем по лампочкам блоков ЛУ (КС 52.30) "ответов" от КП.
При отсутствии ответа от КП необходимо выяснить причину (канал связи, электропитание на объекте, исправность аппарата КП, узла ЛУ в ПУ и т.д.);
оценку основной погрешности параметров телеизмерения.
Частичная проверка ТК предусматривает:
проверку функционирования ТК в целом и сопоставление основных осциллограмм, характеризующих работу ФБ и узлов, с осциллограммами, приведенными в протоколе наладочных работ. Особое внимание следует обратить на напряжения в блоках питания, амплитуду и длительность элементарных сигналов между модемами и линейными узлами ТК;
проверку и смазку вентиляторов в аппарате ПУ (обдув микроЭВМ и КК в стойке ПУ);
оценку основной приведенной погрешности системы телеизмерения (включая первичные датчики).
Полная проверка ТК проводится в таком же порядке, как и частичная, но включает в себя дополнительно:
проверки перезагрузки БПО как с ППЗУ, так и с НГМД; первая проводится нажатием красной кнопки на ФБ Р-25, вторая - в следующем порядке:
загрузка с НГМД системы "ФОДОС"; загрузка системы "ОС РВ ГРАНИТ";
проверка резервирования микроЭВМ путем выключения блока питания ЭВМ. Работа на диспетчерском дисплее не должна нарушаться.
2.9. Прием в эксплуатацию ТК ГРАНИТ от наладочных фирм
По окончании наладочных работ на ТК ГРАНИТ персонал, занятый эксплуатацией систем телемеханики, должен произвести приемку. Во время приемки проверяется функционирование ТК, а именно:
правильное прохождение телесигналов (ТС) от первичных датчиков ТС на стороне контролируемого пункта до ламп диспетчерского щита. Особое внимание следует обратить на квитирование общей кнопкой поступившего сигнала. Проверить поведение ТК при отключении и включении электропитания каркасов с выходными блоками ТС;
прохождение команд ТУ при манипуляции с диспетчерского дисплея, работа выходных реле на КП, время удержания включенного реле исполнения команды, защита от выбора двух реле одновременно, двух операций;
погрешность текущих телеизмерений (ТИТ), основная приведенная погрешность;
погрешность и правильная работа интегральных телеизмерений (ТИИ);
загрузка БПО и выход "точки" на экран консоли.
Особое внимание следует обратить на стабильную длительную работу (72 ч) ТК, отсутствие выхода из "точки", т.е. отсутствие необходимости перезагрузки БПО.
Проверка стабильности должна проводиться при различных действиях (штатных) с диспетчерского дисплея или ПЭВМ, подключенной к ТК:
возможность создания новых файлов и коррекции базы данных с помощью НГМД. Оба дисковода должны быть исправны;
напряжение на всех блоках питания, соответствие их допустимым отклонениям;
нагрев блоков питания на ПУ и КП;
наличие гальванической развязки от линейных цепей схемы ПУ и КП;
работа комплекса от двух ЭВМ и их взаимное резервирование путем отключения блока питания одной ЭВМ;
стабильность работы ТК по каналам связи, запас устойчивости, искажения элементарных импульсов и пауз на выходе приемников модемов, включая характеристические искажения (искажение импульса после пяти подряд пауз и наоборот).
По окончании проведения работ следует составить протокол наладки, в котором должны быть осциллограммы на входе и выходе основных функциональных блоков, а также параметры, необходимые для контроля функционирования ТК.
3. МикроЭВМ РПТ-80, краткая техническая характеристика
В энергосистемах России на всех уровнях диспетчерского управления находят применение программно-аппаратные телекомплексы. Наиболее массовое применение получили микроЭВМ типа РПТ-80, которые по существу являются многопроцессорными программными телекомплексами, позволяющими принимать информацию от различных типов УТМ, обрабатывать ее и, с одной стороны, выводить для отображения на приборы, диспетчерский щит, дисплей, а с другой - передавать в канал телемеханики (КТМ) для ретрансляции на вышестоящий диспетчерский пункт (ДП). Кроме того, имеется возможность вывести информацию для передачи в другую ЭВМ (обычно в миниЭВМ различных типов).
Программное обеспечение микроЭВМ типа РПТ-80 является специальным, специфичным, учитывающим наличие в эксплуатации различных типов УТМ, находящихся на энергообъектах (электростанциях, подстанциях, ДП ПЭС), а также задачи диспетчерского управления.
Широкое внедрение микроЭВМ типа РПТ-80 в качестве ТК стало возможным благодаря использованию в их составе программируемых канальных адаптеров (ПКА). Последние программируются для работы с различными типами УТМ.
Функция ПКА - принять информацию из КТМ, проверить достоверность, сравнить ее с той, которая находится в базе данных (поле мгновенных значений - PMZ) и в случае отличия записать в буфер поля декодирования (РДК), оттуда информацию считывает и обрабатывает центральный процессор (ЦП), выполняя комплекс программ БПО.
Функцию преобразования последовательного кода в параллельный, и наоборот выполняет в ПКА элемент 8251, у которого есть регистры: состояния и данных. Бит 02 в регистре состояния указывает на готовность для процессора считывать байт информации из элемента. Бит 01 в этом же регистре указывает на готовность записать байт в элемент. Таким образом, наблюдая за битом 02, можно судить об исправности канала передающего аппарата, правильности полярности линии. Не во всех программах для ПКА регистр состояния переписывается в свободную ячейку ОЗУ. Рекомендуется дополнить программу вставкой для обеспечения этой возможности. Это связано с тем, что ячейку ОЗУ ПКА можно вывести на табло инженерного пульта, а регистр состояния элемента 8251 - нельзя.
3.1. Организация таблиц базы данных, полей и буферов в РПТ-80
Таблицы исходных данных
Все исходные данные хранятся в постоянной памяти ППЗУ и могут меняться в процессе эксплуатации.
Буфер ДК
Буфер ДК на одно направление занимает 16 либо 32 байта в зависимости от скорости в КТМ.
При расчете длины ДК необходимо подсчитать время передачи четырех информационных слов в канале. Если время передачи четырех слов не менее 100 мс, то достаточно иметь буфер на 16 байт. В противном случае буфер ДК приема должен иметь 32 байта.
На одно информационное слово (ТИ и ТС, ЦБИ, СЛИ) буфер ДК имеет следующую структуру:
первый байт - байт состояния, по числу в этом байте центральный процессор (программа PRIEM) и адаптер ПКА (программа в адаптере) взаимодействуют между собой;
01 - место в ДК свободно для записи адаптером;
88 - информация вида ТИ;
81 - информация вида ТС;
02 - центральный процессор не успевает принимать информацию;
84 - информация вида ЦБИ;
90 - информация вида СЛИ;
40 - идет чтение информации ЦП-ом;
20 - информация принята адаптером по квазициклу.
Остальные 3 байта:
а) для ТИ и ТС:
старший байт адреса в PMZ;
младший байт адреса в PMZ;
информация.
б) для ЦБИ:
номер направления;
FF или FE - признак ЦБИ;
информация.
в) для СЛИ:
номер направления;
старший байт СЛИ;
младший байт СЛИ.
По заполнению буфера ДК можно судить о правильности запуска программ центрального процессора. Если все места в буфере ДК заняты, то канальный адаптер запишет информацию на занятое место и в первую ячейку запишет 02.
Если данный буфер разбирается, то признак 02 снимается, но наличие его запоминается в ячейке 1708 (01), где он будет находиться до тех пор, пока не пройдет рестарт системы. Наличие 02 в ДК и 01 в 1708 требует уменьшения времени разбора буфера ДК центральным процессором (но такое уменьшение может плохо отразиться на работе других программ).
Длина буфера ДК задается в таблице SUTM. Канальный адаптер записывает информацию в ДК приема в случае:
если принятая информация отличается от PMZ;
наличия признака необходимости информации по таблице ТАВРRI.
3.2. Ориентация в базовом программном обеспечении микроЭВМ РПТ-80,
работающей в режиме ЦППС
Программы ЦП:
Фон, начальный адрес А400. Запуск с консоли через 2-ю функцию (затем два раза пробел).
В фоне ЦП выполняет следующие программы:
1. Временной контроль приема ЦБИ.
2. Временной контроль передачи ЦБИ.
3. Запуск адаптера ретрансляции.
4. Разбор служебной информации из MEVSL.
5. Контроль приема от низовых устройств телемеханики и передача сообщения на верхний уровень.
6. Перекомпоновка ТС.
7. Запись признаков перевода ТИ-ТС на ручное управление (отображение на щит через ВТИС).
8. Отображение аналоговых ТИ и ТС на щит (ВТИС).
9. Отображение информации из ЭВМ на щит (ВТИС).
10. Контроль за работой адаптеров.
11. Оценка состояния каналов.
12. Перезагрузка ОЗУ КП.
13. Переключение каналов по команде.
14. Контроль связи с ЭВМ и вывод на пульт.
15. Вывод текущего времени от часов.
16. Масштабирование.
Программа фон замкнута в кольцо.
Имеется несколько задач, которые прерывают фон, их периодически запускает операционная система RPS.
Эти задачи с указанием периода их запуска перечисляются ниже:
Задача 08 период 0,001 | - вывод на цифровой индикатор инженерного пульта до трех ячеек памяти. Начальный адрес задачи 66А0. Адреса ячеек оператор записывает с дисплея по адресам 2F00-2F05. |
Задача 09 | - загрузка данных из таблиц ППЗУ в ОЗУ выполняется однократно при рестартах. Начальный адрес 9800. Оператор может запустить задачу (в системе без автозапуска), установив курсор по адресу 9800, и нажать клавишу S однократно. |
Задача 0А период 0,005 | - прием, т.е. обслуживание буферов ДК приема, в которые информацию записывают процессоры канальных адаптеров (по прямому доступу к оперативной памяти). Начальный адрес программы 8С00. Запуск через 4-ю функцию с дисплея (в системе без запуска). |
Задача 0В период 0,005 | - передача, т.е. обслуживание буферов ДК передачи. Процессоры канальных адаптеров считывают информацию из них для передачи. Начальный адрес 8000. Запуск аналогичен программе прием. |
Задача 0С период 0,00А | - Ввод в ЭВМ из РПТ-80, т.е. обслуживание буферов, из которых адаптер передает информацию. Начальный адрес 9200. |
Задача 10 | Однократный вывод кадра на дисплей №2 (№1). Начальный адрес С006. |
Задача 11 | Услуги на удаленном дисплее №2. Начальный адрес С009. (Обязательно установить кабель с разъемом на плату РТ-25, у которой адрес 3Е). |
Задача 12 | Однократный вывод кадра на дисплей №1 (№2). Начальный адрес С006. |
Задача 13 период 0,06 | - Периодичность обновления экрана. Начальный адрес C00F. |
Задача 14 | Печать для АЦПУ. Начальный адрес С012. |
Задача 15 период 0,001 | - Проверка интервала. Начальный адрес Е1С0. |
Задача 2F период 0,00А | - Контроль неисправности в канале. Начальный адрес 9А50. |
Задача 50 период 0,003F | - Передача информации из РПТ в СРИ № 3. Начальный адрес 8АЕ0. |
Задача 0,6 | Обработка прерывания 6-го уровня от СРИЗ. Начальный адрес 8ВЕЗ. |
3.3 Порядок действий оператора при вводе в эксплуатацию пользовательского
программного обеспечения для микроЭВМ РПТ-80
Проверить установку всех необходимых плат:
РТ-11 – плата центрального процессора; РТ-45 – 2 шт. – платы ОЗУ, одна с адресом 1000, другая – 2000; плата РТ-30 – генератор (на нее устанавливается разъем от инженерного пульта); плата РТ-40 – операционная система RPS и таблицы; плата РТ-43 – пользовательские программы, разработанные ВНИИЭ; РТ-9 – плата аккумулятора.
В этот же каркас установить программируемые канальные адаптеры РТ-27.
В ППЗУ на плате РТ-11 по адресу 06 ВА должна быть записана граница обнуления ОЗУ центральным процессором, т.е. число 2F.
Установить в другой каркас платы синхронизаторов РТ-28 и соединить их штатными кабелями с РТ-27 и КТМ.
На платах РТ-27 должны быть установлены ППЗУ объемом 2 кбайта с программами приема-передачи от соответствующих устройств телемеханики (ТМ512, ГРАНИТ, РПТ-80 и т.д.).
На плате РТ-40 по адресу 6400 должна быть составлена таблица приемников, 6500 - таблица передатчиков, 6700 - начальные адреса буферов, массивов, константы, таблица задействованных устройств SUTM с адреса 67A0-67BF. Если направление или адаптер не задействованы, отмечается 00.
Таблица признаков TABPRI вначале может быть вся FF, потом ее следует записать (как и все другие) в соответствии с отчетом ВНИИЭ.
Проверить в 6754, 6753 объем поля мгновенных значений PMZ; если там записано 00ED, то объем PMZ - 12FF (начиная с 1000, записано в обратном коде и байты переставлены местами, так нужно по условиям работы программы).
В ячейке 1708 отражается признак того, успевает ли ЦП разбирать ДК.
3.4. Запуск периодической задачи в микроЭВМ РПТ-80
На цифровые индикаторы инженерного пульта требуется вывести три ячейки, адреса которых, например, 2F43, 2F44, 2F45.
В ОЗУ ЦП записывается программа с консольного дисплея. Адреса цифровых индикаторов 08, 0А, 0В.
LXI MOV | H, A, | 2F43 ; M ; | занести в регистры HL адрес 2F43 перенести содержимое ячейки, адрес которой 2Р43→Ак |
OUT | 08 | ; | вывести содержимое аккумулятора на левый индикатор (можно |
LXI | H, | 2F44 ; | занести любой другой адрес, поэтому LXI, а не INX Н) |
MOV | A, | M | |
OUT | 0A | ||
LXI | H, | 2F45 | |
MOV | А, | M | |
OUT | 0B | ||
CALL | 004C | ; | уход в операционную систему. |
Дальнейший порядок действий оператора для запуска периодической задачи:
в списке услуг "Видеотона" нажать цифру 6 далее (пробел)
ответ Code: (запрос кода задачи). Нужно выбрать любой код, кроме тех, которые уже есть. Например: 44
Priority: (запрос приоритета). Ответ: 44
ТСВ: (требуется отвести 2-е свободные строки, начиная с определенного адреса, например 2Е00)
Ответ: 2Е00 (символ пробела)
stack: (требуется указать начало стека для задачи). Например:
Ответ: 2EFF
программа Program: (запрос начального адреса нашей задачи).
Ответ: 2D00 (если текст задачи начинается с адреса 2D00).
Таким образом производится описание Compose задачи через 6-ю услугу.
Далее нужно задачу запустить. Это делается через 4-ю услугу:
Нажать: 4
Ответ: Code
Напечатать: 44 (три пробела)
Ответ: В
Напечатать период запуска задачи
Например, ответ: 0001 (1-100 мс)
Задача запущена!
Останов задачи через 7-ю функцию.
Задача будет работать до тех пор, пока не произойдет рестарт либо останов ее через 7-ю функцию.
Если требуется вывести на цифровые индикаторы ячейки ОЗУ какого-либо канального адаптера, то программа должна содержать в тексте останов и запуск адаптера с указанием его адреса.
Например:
3Е20D3F7 | 210BF7 | ||||||
останов адаптера F7 занести в HL адрес | ячейки F70B | ||||||
7ED308 | 210CF77E | D30A | |||||
вывод из АК | вывод из АК | ||||||
на индикатор 0В | на индикатор 0А | ||||||
3Е40D3F7 | CD4C00 (конец) | ||||||
пуск адаптера | уход в опреационную систему | ||||||
Та же программа на языке ассемблера: | ||||
MVI OUT | А, F7 | 20 | останов адаптера F7 | Остальные действия все те же, которые описаны выше с периодической задачей. |
LXI MOV MOV LXI | H, A, 08 H, F70C | F70B М | адреса в ОЗУ ячеек, за которыми ведутся наблюдения | |
MOV OUT MVI OUT CALL | A, 0А А, F7 004C; | M НОМЕ | (в систему). | |
3.5. Порядок действий оператора при работе с программатором
инженерного пульта микроЭВМ РПТ-80
Установить в правый подсхемник ППЗУ 2 кбайта и зажать микросхему.
Повернуть переключатель вправо, после чего загорится светодиод.
Включить питание пульта.
С консольного дисплея вызвать 0-ю услугу RPS.
На вопрос: тип? ответить 2 (при ППЗУ 2 кбайта).
пробел
Ответить 2 (чтение).
Указать адрес, начиная с которого содержимое ППЗУ будет считано в ОЗУ (обычно 1000 или 2000).
Каждый ответ сопровождать нажатием клавиши "пробел".
После чтения сравнить содержимое ППЗУ и его копии в ОЗУ с помощью функции сравнения (3). Если ответ identifical, то все нормально, если ответ error, то следует заново переписать ППЗУ функцией 2.
При записи в ППЗУ следует предварительно подержать микросхему под лучами ультрафиолетовой лампы 10 мин, а затем воспользоваться функцией 1 все той же 0-й услуги RPS. При записи клавиши "пробел" нужно нажать два раза подряд. На цифровом индикаторе инженерного пульта отражаются адреса в ППЗУ в процессе записи.
3.6. Методика отыскания причины рестартов в микроЭВМ
При передаче информации ЦП останавливает плату адаптера, затем записывает в ОЗУ адаптера информацию и вновь запускает адаптер. При частых операциях останова и запуска (например, в программе вывода информации на щит или на устройства управления щитом) возможны случаи отсутствия ответного импульса от платы адаптера. В результате происходит рестарт.
Другой причиной рестарта может быть незавершенность работы той или иной программы пользовательского программного обеспечения.
Для отыскания причины рестартов в эксплуатационных условиях рекомендуется следующая методика:
заменить ППЗУ с адресом 4000 "с запуском" на ППЗУ 4000 "без запуска" периодических задач;
стартовать программу "ФОН" с помощью функции N 2 операционной системы RPS;
стартовать программу загрузка. Для этого открыть ячейку 9200. Подвести курсор к 9200 и нажать клавишу "S";
запускать с дисплея отдельные задачи, пользуясь функциями № 6 и 4 операционной системы RPS. При диалоге указывать номера задач, ТСВ, адреса, стек, приоритет (те, что записаны в таблице, начиная с адреса 6600).
После пуска каждой задачи отмечать наличие или отсутствие рестарта (если проходит рестарт, то на консольном дисплее появляется меню системы RPS, а в ячейке 2FFF (счетчик рестартов) добавляется единица.
Все запущенные задачи будут работать до тех пор, пока не возникнет рестарт.
В случае, если запущена задача, которая вызывает рестарт, следует заново перепрограммировать ППЗУ, на которых записана эта задача.
По окончании заменить ППЗУ 4000 "без запуска" на ППЗУ 4000 "с запуском" задач.
Для устранения рестартов, вызванных частыми остановами канального адаптера, следует реконструировать программу адаптера и ЦП таким образом, чтобы процессор адаптера читал ячейки в ОЗУ ЦП (по прямому доступу), а ЦП не останавливал плату адаптера. (Конкретная реализация по договору с АО "Фирма ОРГРЭС").
4. Центральная приемопередающая станция на базе эвм беста,
телемеханический адаптер isio, краткая техническая характеристика
4.1. Организация системы приема-передачи телеметрической информации
на базе контроллера ISIO (СПП ISIO)
Основной функцией СПП ISIO является прием оперативной информации с нескольких направлений, ретрансляция принятой информации на другие направления, выдача информации в ЭВМ "БЕСТА", прием информации из ЭВМ "БЕСТА" для передачи по заданному направлению.
Система приема-передачи ISIO обеспечивает:
параллельное подключение к КТМ;
подключение к одному контроллеру до 8 дуплексных каналов;
прием и передачу информации с разными скоростями.
Основные задачи, выполняемые контроллером, следующие:
преобразование последовательного кода в параллельный при приеме информации;
декодирование принятой информации в соответствии с заданным кодом;
контроль приема маркера;
контроль работы кодовой защиты;
перезапуск направления при определенных условиях;
кодирование информации для передачи в канал в соответствии с заданным кодом;
преобразование параллельного кода в последовательный для передачи в канал.
Кроме этих функций, определяющих характеристики приемопередающего устройства, СПП ISIO обеспечивает выполнение интеллектуальных функций (по аналогии с микроЭВМ РПТ-80):
формирование поля мгновенных значений ТИ и ТС;
формирование массива изменившихся ТИ и ТС;
прием и передачу цифро-буквенной информации (ЦБИ);
прием и передача служебной информации о состоянии канала связи;
адаптивный алгоритм передачи информации, обеспечивающий выполнение заданной приоритетности в передаче различных видов информации;
обеспечение повторной передачи информации при получении переспроса на нее или запроса;
обеспечение запроса на вновь поступившую информацию ТС с целью ее достоверизации;
обеспечение повторной передачи ЦБИ, если на приемном конце она не была принята;
сжатие информации, передаваемой пользователю (в ЭВМ "БЕСТА"), т.е. передача только изменившихся значений;
формирование и передачу сообщения в обратный канал о нарушении приема при отсутствии информации на входе приемника.
Состав и назначение программного обеспечения
Для выполнения указанных функций СПП ISIO разработан комплекс программ и функций, обеспечивающих работу контроллера с заданными характеристиками, и интерфейс пользователя для доступа к данным и настройки контроллера.
При этом программное обеспечение можно рассматривать на четырех уровнях:
уровень программ, реализуемых в контроллере (в ISIO);
уровень драйвера ISIO (в БЕСТ);
уровень пользовательских программ (в БЕСТ);
общесистемный уровень.
Характеристика программного обеспечения, реализуемого в контроллере
Программное обеспечение в контроллере реализуется в виде двух наборов программных модулей (ядро программного обеспечения, протокол обмена), решающих самостоятельные задачи.
Ядро, реализованное в виде набора модулей begin ( ), tasks ( ), low ( ), isio_data ( ), обеспечивает:
настройку платы ISIO на заданные характеристики обмена по каналу (скорость передачи, тип маркера, длина "блока информации'' пр.);
запуск комплекса программ, реализованных в контроллере;
диспетчеризация программ обслуживания инициализированных каналов контроллера;
реализация функций чисто приемопередатчика (преобразование из параллельного кода в последовательный и наоборот).
Протокол, реализованный в виде набора модулей aist ( ), tm512 ( ), proc ( ), обеспечивает:
кодирование и декодирование информации;
контроль кодовой защиты;
реализацию заданного протокола обмена;
реализацию интеллектуальных функций организации обмена;
подготовку структур данных для передачи их пользователю.
ДРАЙВЕР ISIO (модуль isio.c ядра UNIX)
Драйвер доработан с целью обеспечения выполнения задач, специфичных для СПП ISIO.
Доработанный драйвер позволяет выполнить команды:
TELEMEHINIT | - инициализировать канал для приема-передачи телеметрической информации; |
GETTELEMEH | - прочесть из контроллера принятую телеметрическую информацию; |
PUTTELEMEH | - записать в контроллер телеметрическую информацию. |
Уровень пользовательских программ
Для обеспечения работы пользователя по настройке каналов обмена на заданные параметры обмена, организации приема-передачи доступа к телеметрической информации разработаны функции:
init_channel - инициализация канала;
GetFromChannel - чтение информации из канала;
PutChannel - запись информации в канал.
Общесистемный уровень
Для загрузки математического обеспечения СПП ISIO в память контроллера используется программа isio_boot.
4.2. Организация работы с СПП ISIO
При загруженном математическом обеспечении платы ISIO пользовательская программа, занятая обменом с ISIO, выполняет следующие функции:
инициализация канала (однократно);
периодическое чтение данных из ISIO;
запись данных в ISIO (по необходимости).
Организация программы пользователя
В программе инициализируются структуры:
dpr_tel Имя_dрг
put_tel Имя_рut
prt_param Имя_рагаm
get__tel Имя_gеt
chan__init Имя_init
При этом используется структура обращения к функции инициализации канала:
struct chan_init | { |
struct dpr_tel | *dpr_ptr; - адрес структуры Имя_dpr |
struct prt_param | *param_ptr; - адрес структуры Имя_раrаm |
short | n_line; - номер линии; |
int | chan_descr; — дескриптор канала }; |
Перед инициализацией канала:
заполняется структура Имя_dpr параметрами, определяющими характеристики приема/передачи по данному каналу:
prizn_post [] - битная линейка признаков поступления информации;
prizn_zd [] - признаки задействованности принимаемых параметров;
retrsl [] - массив описания ретрансляции;
retrsl_list [] - список ретрансляции;
agran - граница между ТИ и ТС в поле приема;
agran_out - граница между ТИ и ТС в поле передачи;
maxaddr - максимальный адрес в поле приема;
maxaddr - максимальный адрес в поле передачи;
kw_c_word1 - номер 1-го слова для квазицикла;
kw_c_word2 - номер 2-го слова для квазицикла;
channel_type - прямой/обратный канал;
заполняется структура Имя_раrаm параметрами:
num | - протокол; |
baud | - скорость (Бод); |
*dpr_tel_ptr | - адрес подготовленной структуры Имя_dpr; |
заполняется структура Имя_init параметрами:
*dpr_ptr; - адрес структуры Имя_dpr;
*param_ptr; - адрес структуры Имя_раrаm;
n_line; - номер линии, по которой организуете? обмен (например 12i).
После подготовки исходных данных вызывается функция инициализации канала:
Имя_ch_descг = chan_init (& Имя_init);
Функция открывает канал на чтение/запись, передает isio параметры инициализации и возвращает дескриптор канала, с которым в последствии следует обращаться для чтения из канала/записи в канал.
Для организации чтения из канала необходимо заполнить структуру Имя_get и вызвать функцию:
Get From Channel (& Имя_det, дескриптор канала);
Для организации записи в канал (передача) необходимо заполнить структуру имя_put, где даются адреса информации, которую требуется передать и вызвать функцию:
Put To Cannel (*Имя_Риt, дескриптор канала);
Описание структуры данных интерфейса пользователя
Определения:
PRT_AIST (1)-протокол АИСТ
PRT_TM512 (2) -протокол ТМ512
Структура инициализации канала:
Struct prt_param { | |
int num; - протокол | |
int baud; - скорость (Бод) | |
struct dpr_tel *dpr_tel_ptr; - адрес подготовленной структуры dpr_tel |
Структура запроса данных из isio:
Struct get_tel { | |
int pmz_max; длина запроса из поля изменившихся значений | |
struct var_pmz *var_pmz_ptr; - адрес, куда передать информацию | |
int ts_max; длина запроса var_ts | |
struct var_ts; *var_ts_ptr; - адрес, куда передать информацию | |
int ti_max; длина запроса var_ti | |
struct var_ti *var_ti_ptr; - адрес, куда передать информацию | |
int cbi_max; длина блока ЦБИ | |
struct cbi_blk *cbi_blk_ptr; - адрес, куда передать информацию | |
int debug_buf_max; длина буфера отладки | |
unsigned char *debug_buf_ptr; - адрес, куда передавать информацию | |
}; |
Структура задания на запись данных в isio:
struct put_tel { | |
int pmz_max; - длина записи в поле передачи | |
struct vaz_pmz *vaz_pmz_ptr; адрес, откуда взять данные | |
struct cbi_blk *cbi_blk_ptr; адрес структуры, где хранится блок ЦБИ | |
}; |
Описание структуры хранения данных (общая для задач всех уровней)
Определения:
max_ADDR (256) | - количество элементов в поле мгновенных значений (максимальный адрес &FF); |
max_RETR_LJST (256) | - максимальное число элементов в списке ретранслируемых параметров; |
VAR_TS_NUM (45) | - максимальное число элементов в списке изменившихся ТС; |
VAR_TS_NUM (100) | - максимальное число элементов в списке изменившихся ТИ; |
CBI_SIZE (128) | - максимальное число байт в блоке ЦБИ; |
DIRECT_channel (0) | - прямой канал; |
INVERS_channel (1) | - обратный канал. |
Элементы массива хранения данных (используются в общей структуре описания данных):
Элемент поля мгновенных значений:
Struct var_pmz_d | |
{ | |
unsigned char addr; адрес | |
unsigned char value; значение | |
}; |
Элемент поля изменившихся ТС:
Struct var_ts_d | |
{ | |
unsigned char num; номер ТС в байте | |
unsigned char value; значение ТС | |
unsigned char time; время поступления (относительно времени отбора данных из ISIO) | |
unsigned char prizn; | |
}; |
Элемент поля изменившихся ТИ:
struct var_ti_d | |
{ | |
unsigned char addr; адрес параметра | |
unsigned char value; значение ТИ | |
unsigned char time; время поступления (относительно времени последнего отбора данных в ISIO) | |
unsigned char prizn; | |
}; |
Элемент массива описания ретрансляции:
(Каждому принимаемому параметру может быть поставлен в соответствие список из не более 7 элементов: "номер направления, адрес, куда ретранслировать)
struct_retrsl_par {
unsigned chort retr; 1; | признак ретрансляции: "1" |
- ретранслируется, "0" - нет | |
unsigned short k_el: | 3 количество элементов в списке: |
если 1, то ретрансляция в k_el направлений. | |
unsigned short rezv; | 2 |
unsigned short list_adr: | 10 номер 1-го элемента списка |
};
Элемент списка ретрансляции:
struct retrsl_entry {
unsigned char retr_naprawl; направление ретрансляции внутри платы ISIO (0-7)
unsigned char retr_addr; адрес параметра при ретрансляции.
Блок приема-передачи ЦБИ
struct cbi_blk {
unsigned char cnt; | количество байт в блоке ЦБИ |
cbi [CBI_SIZE]; информация cbindx; num; cbiks; cbiksco; busy; |
};
Общее описание структуры приема и хранения данных:
struct dpr_tel { | ||
key_master_pmz; служебная информация key_slave_pmz; key_master_var; keu_slave_var; debug_buff [20]; PMZ [MAX_ADDR]; поле приема | ||
prizn_post [MAX_ADDR/8]; prizn_zd [MAX_ADDR|; | битная линейка признаков поступления признаки задействованности принимаемых параметров | |
struct retrsl_par retrsl [MAX_ADDR]; массив описания ретрансляции struct retrsl_entry retrsl_list [MAX_RETR_LIST]; списки ретрансляции | ||
struct var_ti { массив изменившихся телеизмерений
unsigned long time; текущее время
unsigned short cnt; количество элементов в списке
struct var_ti_d ti [VAR_TI_NUM]; список изменившихся ТИ
} var_ti;
struct var_ts { массив изменившихся телесигналов
unsigued long time; текущее время
unsigned short cnt; количество элементов в списке
struct var_ts_d ts [VAR__TS_NUM]; список изменившихся ТС
} var_ts;
unsigned char pmz_out [MAY_ADDR]; - поле передачи
unsigned char prizn_post_out [MAX_ADDR/8]; признак поступления параметров в поле передачи
struct cbi_blk *cbi_ptr; адрес блока приема ЦБИ
struct cbi_blk *cbi_out_ptr; адрес блока передачи ЦБИ
unsigned char cbi_full; struct cbi_blk; cbi_blk; блок для приема ЦБИ.
Параметры для настройки и управления:
agran; - граница между ТИ и ТС в поле приема;
agran_out; то же в поле передачи
maxaddr; максимальный адрес в поле приема
maxaddr; максимальный адрес в поле передачи
bsos; байт состояния
err_cnt; счетчик ошибок
err_enguir; счетчик переспросов по ошибке приема cikl; признак проведения циклической передачи, взводится при приеме сообщения FD 8F
cikl_cnt; актуальный адрес в pmz_out для циклической передачи
kwazi_cikl_cnt; актуальный адрес в pmz_out для квазициклической передачи
kw_c_word 1; номер 1-го слова для квазицикла
kw_c_word 2; номер 2-го слова для квазицикла
channel_type; прямой/обратный канал
buf_out_cnt;
target_state;
Внимание! Изменение указанных структур данных требует последующей перетрансляции драйвера ISIO и инсталяции ядра UNIX.
4.3. База данных для ISIO
Для работы с большого дисплея с ЦППС следует указать:
либо
rlogin slave [master] Enter
дважды ввести: | |
пароль | kgl Enter kgl Enter |
указать дисплей | |
:0.0 Enter либо 0.1 | |
далее | |
далее | dp Enter ?/1 Нажатие этой клавиши выводит список услуг |
Для приема и ретрансляции телеинформации необходимо заполнить массивы, описанные в служ 77. Номера 0-10 (по служ 23), 0-11, 0-20, 0-63, 1-44, 1-57, 1-45, 1-82 (с каталогом 1-83), 1-64, 2-46, 2-48, 2-62, 2-73, 2-74.
В служ 6 описано, что собой представляет массив. Чтобы выбрать массив и группу, следует воспользоваться служ 12.
мышь - войти внутрь
экран страницы
потом два раза Enter
потом Contr + D
Для включения нового параметра в систему приема и обработки необходимо воспользоваться служ 44 - логический номер параметра для ТИ.
Служ 34 - логический номер параметра для ТС.
После описания необходимо произвести рестарт.
Описание массивов, используемых в системе приема и обработки, находятся в TELEM.C
/udd/OIK/DOCUMENT/TELEM.C
/udd/OIK/help/COMP 10
Раз в 5 с ЦП (Motorola) обращается к ISIO (а не по прерыванию от ISIO через VME-шину).
Каждая циклическая задача имеет формуляр в базе данных.
Центральный процессор реализует так называемую 100-ю задачу. Она использует драйвер обращения к ISIO. В 100-й задаче есть функция обращения, которая проводит инициализацию канала, берет информацию, записывает информацию в ISIO.
telestruct.H - это описание структуры данных в ISIO.
В описателе указано, что канал № ___ стартовать в ISIO и его адрес _____ такой-то. Таким образом ЦП стартует ISIO.
Действия на дисплее:
dp — получаем приглашение для дальнейших действий.
у — появляется служ.
Набираем 23. Появляется список направлений телемеханики.
Да - это значит данное направление старт имеет от Motorol.
Далее можно выбрать направление и смотреть, что там имеет место.
Возможности:
1. Ввод наименования направления.
2. Описания параметров направления.
3. Циклическая передача по направлению.
4. Циклическая передача по всем направлениям.
5. Отключение направления.
6. Подключение направления.
7. Контроль PMZ приема.
8. Контроль PMZ передачи.
9. Таблица внутренней ретрансляции.
10. Состояние канала.
Описание параметров направления
Направление 12 Центр
Признак запуска: 1 | Тип устройства ISIO: | протокол АИСТ, скорость 200 Бод | ||
Номер линии 7i | Управление: | Канал основной/ резервный | ||
Тип канала: прямой | Способ задания скорости: | стандартный | ||
Наличие резервного канала: нет | Стартующий канал: | основной | ||
Признак задейственности: 0 | Параметры протокола | [F3] | ||
Таблицы состояний канала | ||||
Время инициализации Время последнего чтения Текущее состояние канала: 0. | ||||
Счетчики: | Запросов смены канала Рестартов (внутренних) Смен канала Решений "ошибка в канале" Снятие решений "ошибка в канале" Ошибок декодирования Неправильных маркерных посылок Отправленных запросов fД 40 (нет приема) Принятых ответов fA-20 (восстановление приема на противоположном конце) | |||
Флаги: | Функционирование приемного алгоритма Функционирование передающего алгоритма Запрос смены канала Фаза ожидания маркера Ошибки декодирования Ошибки адреса Повреждение рабочего канала Ошибки в канале. | |||
Чтобы установить массив и группу нужно: | ||||
1) CtrI+Д Enter 2) еще раз Enter 3) установить массив, группу Enter. | ||||
CTRL D – параметры -"- R - страница + -"- U – страница -"- Т – время -"- О - сброс времени -"- Е - выход в Shell -"- Р - дополнительные параметры | CTRL F – форматы -"- H – помощь -"- В - в начало -"- М - разные типы -"- G - массив + -"-V - элемент + -"- N - элемент - | |||
4.4. Рекомендации по выявлению причин отсутствия
телеинформации в системе РПТ-Motorola (БЕСТА)
Методы эксплуатационного обслуживания базируются на основе комплексных знаний инженером всей системы передачи оперативных данных (СПОД) в ЦДУ ЕЭС России. Необходимо четко знать общую структуру СПОД. Передающая сторона в качестве технических средств сохраняет микроЭВМ РПТ-80. На приемной стороне прием и передача телеинформации производятся ЦППС Motorola, в составе которой имеются канальные адаптеры ISIO, описанные в данной Инструкции. В СПОД входят каналы телемеханики, по которым передается телеинформация от РПТ-80 к ЦППС и обратно. При отсутствии приема в ЦППС следует проверить наличие протокольных сообщений на входе ISIO (и на выходе, если нет приема в РПТ-80).
Необходимо проконтролировать: скорость в канале, искажения элементарных импульсов и пауз ("1" и "0"), обратив особое внимание на характеристические искажения (т.е. длина "1" или "0" после нескольких "0" или "1" подряд, 5:1, 6:1), измерить амплитуду импульса и паузы, двухполярность сигнала на выходе модема, установить, что полярность правильная, отсутствие узких помех или наводок на импульсах и паузах. Все измерения проводить осциллографами С-1-94, С-1-68.
Если отсутствуют претензии к каналу телемеханики, следует проверить наличие приема в резервной в данный момент времени ЦППС (Motorole). Отсутствие приема достоверной информации в обоих ЭВМ свидетельствует, что на вход ЦППС либо подан сигнал не от нужного передатчика (перепутаны каналы), либо имеет место неисправность в РПТ-80 на передающей стороне.
Для дальнейшего решения целесообразно подключить к каналу ПЭВМ с канальным адаптером ВНИИЭ и убедиться в наличии или отсутствии приема.
Если прием в ПЭВМ имеет место, но информация принимается недостоверная, следует на стороне передатчика РПТ-80 принять передаваемую в ЦДУ информацию (т.е. "завернуть" канал) и искать причину в РПТ-80 на передающей стороне.
В случае, если все проверки, описанные выше, показывают отсутствие претензий к каналу телемеханики и к передающей стороне, следует перейти к проверке ЦППС Motorola. Порядок действий: ввести телеинформацию, принятую ISIO, в обратный канал и принять ее на ПЭВМ с адаптером ВНИИЭ.
В случае недостоверности заменить плату ISIO. Если такая проверка покажет достоверность информации, причину следует искать в работе программ ЦП. Должна иметься возможность "разгрузки" ЦП с дисплея, т.е. останов программ (последовательно одну за другой). В работе должен остаться только драйвер ISIO и пользовательская программа переписи информации из ISIO в ОЗУ ЦП.
Если такая "разгрузка" покажет, что информация стала достоверной, причину следует искать в программе, после отключения которой информация достоверизировалась.
5. Телемеханический комплекс ТК-113, техническая характеристика
Комплексы средств телемеханики ТК-113 предназначены для сбора, передачи, первичной обработки и воспроизведения информации в АСУ ТП и системах оперативно-диспетчерского управления объектами предприятий и районов электрических сетей. Входят в состав унифицированного семейства комплексов на микропроцессорной основе.
Комплексы ТК-113 имеют четыре базовых исполнения, различающихся функциональным назначением и конструктивно.
Комплекс ТК-113-00 выполняет функции ПУ, размещается в напольном шкафу.
Комплексы, соединенные каналами связи, образуют телемеханическую систему, в которой к одному ПУ может быть подключено до 60 других аппаратов ПУ и КП. Каждый ПУ имеет возможность ретрансляции информации на вышестоящий уровень диспетчерского управления.
Комплексы работают по всем типам каналов связи произвольной конфигурации. Согласование с каналами связи осуществляется посредством линейных модулей (модемов), которые входят в номенклатуру изделий, поставляемых заводом.
Шкафы имеют блочную конструкцию. Кроме нескольких обязательных типов модулей (процессор, модуль памяти, контроллер дисковода и т.п.) блоки заполняются функциональными модулями ввода и вывода информации в количестве, необходимом в каждом конкретном случае для организации передачи (приема) требуемого объема информации. Максимальное количество модулей связи с объектами, размещаемое в шкафу:
ТК-113-00 – 40 шт.; ТК-113-02 – 24 шт.; | ТК-113-01 – 8 шт.; ТК-113-03 – 45 шт. |
В каркасах блоков закрепляются пластмассовые направляющие для установки плат функциональных модулей, ряды зажимов и генмонтажная плата с розетками жгутов внешних связей. Генмонтажная плата - это плата с двусторонним печатным монтажом магистральных шин интерфейса телекомплекса (ИТК-1). Плата заменяет монтажный жгут. Магистраль или шина представляет собой систему электрических линий, единообразно соединяющих выводы контактов всех разъемов верхнего ряда каркаса блока, к которым подключаются модули системы.
Конструктивное исполнение интерфейса обеспечивает механическую совместимость генмонтажной платы и модулей с целью их соединения для совместной работы.
Блоки заполняются функциональными модулями. Для реализации электрических связей функциональных модулей применяются два соединителя (разъема), расположенные сзади платы. Один соединитель (верхний) служит для подключения модуля к внутриблочной магистрали интерфейсных связей, другой (нижний) - для организации внешних связей.
Магистральная система позволяет простым образом осуществить передачу данных между различными модулями, используя единый протокол обмена информацией, позволяет создать системы различного уровня сложности, обеспечивает гибкость при изменении конфигурации системы, способствует унификации программного обеспечения различных по назначению систем.
В состав комплекса ПУ входит дисковод, с помощью которого в ОЗУ вводится программное обеспечение, монитор (дисплей), на который выводится принимаемая информация и с которого производится управление и контроль за работой телекомплекса, устройство алфавитно-цифровой печати (принтер), работающий через контроллер ИРПС (Т7001). Комплексы снабжены инженерными панелями, используемыми для контроля работы и отладки программ. Кроме того, комплексы ПУ и КП дополняются кроссовыми шкафами для подключения внешних цепей.
Верхний ряд в шкафу всегда занят логическим блоком, входящим в базовый состав комплекса. По принципу действия логический блок является устройством программного регулирования с жестким программированием алгоритмов управления на базе микропроцессора. Задачей логического блока совместно с программным обеспечением является обработка информации, поступающей из канала связи или от датчиков ТС, ТИТ и выдача сигналов для управления объектом.
В логическом блоке размещены постоянные, не зависящие от конкретного заказа модули: центральный процессор (Т2200), два модуля ОЗУ (Т3500), один модуль ОЗУ (Т3502), модуль удлинителя интерфейса (Т2000).
На свободные места в логическом блоке ТК-113-00 устанавливаются любые функциональные модули для работы с периферией:
модуль контроллера ИРПС для работы с устройством печати;
контроллер дисковода с подключенным к нему дисководом;
контроллер монитора со связанным с ним дисплеем;
два линейных модуля Т8503 и Т8504;
модуль удлинителя интерфейса В2000, предназначенный для наращивания функциональных возможностей логического блока.
Блоки расширения ввода-вывода (РВВ) устанавливаются по конкретному заказу.
С помощью модуля удлинителя интерфейса и соединительного кабеля возможно подключение к магистрали ИТК-1 суммарно до трех блоков.
В блоке РВВ установлен модуль контроллера расширения ввода-вывода Т2001, связанный с модулем удлинителя интерфейса В2000 соседнего блока. Могут быть установлены модули воспроизведения ТС (Т9100), имеющие выходы на диспетчерский щит, модули ЦАП (Т9400) для воспроизведения ТИТ, модули ввода ТС (Т9300), связанные с двухпозиционными объектами ТС, модули АЦП (Т9200), связанные с датчиками ТИ.
В последнем блоке, в самом конце интерфейса ИТК-1, устанавливается модуль таймера Т2004, который выполняет роль согласователя волновых сопротивлений интерфейса (заглушка).
Интерфейс допускает установку в логическом блоке и блоках РВВ суммарно до 40 модулей ввода-вывода.
Любой модуль ввода-вывода можно установить на любом свободном месте блочных каркасов аппаратуры, при этом селектор адреса модуля автоматически настраивается на порядковый номер, присвоенный этому месту на магистрали.
Модуль процессора Т2200 (ЦП) является основной частью телекомплекса и осуществляет прием-передачу сигналов управления и обмена данными с модулями памяти и модулями ввода-вывода в соответствии с программами, находящимися в памяти.
Основной элемент процессора - шестнадцатиразрядный микропроцессор К1810 ВМ86. Тактовая частота для процессора и устройств ВВ установлена 4 МГц.
Объем непосредственно адресуемой памяти процессора - 1 Мбайт (1.048.376 байт).
Модули ОЗУ Т3500, Т3502 предназначены для записи, хранения, считывания оперативной информации при отключении основных источников питания. Объем памяти Т3500 - 256 Кбайт, Т3501 - 16 кбайт, Т3502 - 32 кбайт.
Разрядность слова - 22 бит (16 бит - информационные разряды, 6 бит - контрольные разряды). Тип применяемой микросхемы - К573 РУЗ.
Модули обеспечивают исправление одиночных и обнаружение двойных ошибок.
Время сохранения записанной информации после отключения основных источников питания не менее 72 ч.
Модули ППЗУ Т3700 и Т3701 предназначены для записи, хранения и считывания постоянной информации (программ, таймерных данных и т.д.).
Объем хранимой информации для модулей Т3701 - 32 кбайт, Т3700 - 128 кбайт.
Тип применяемых микросхем в модуле Т3700 - К572 РФ4 (8 кбайт), в модуле Т3701 - К572 РФ2 (2 кбайт).
К составу модулей общего назначения относятся модули для связи с периферийными устройствами по параллельному интерфейсу (ИРПР) и последовательному интерфейсу (ИРПС), контроллер монитора Т7100.
Информационная емкость каждого комплекса соответствующего исполнения (по заказу) определяется типом функциональных модулей и их количеством:
модуль телеуправления (Т9700) - 16ТУ;
модуль телесигнализации (Т9300) - 16ТС;
модуль текущих телеизмерений (Т9200) - 6ТИТ;
модуль интегральных телеизмерений (Т9300) - 16ТИИ;
модуль воспроизведения телесигнализации (Т9100) - 16ТС;
модуль преобразования кода в ток (Т9400) - 4ТИТ.
Кроме обычных телемеханических функций по приему и воспроизведению информации, комплекс ПУ выполняет:
автоматический переход на резервный модуль передачи данных в случае неисправности основного модуля или канала связи;
ввод информации в любой комплекс сети по директивам оператора или запросам задач;
периодический контроль неисправности технических средств и линий связи с выдачей сообщений на устройство печати;
организация на мониторах пульта управления обзорного дисплея во всех режимах работы комплекса;
автоматическая фиксация случаев выхода параметров ТИ за уставку и переключений ТС;
задание команд ТУ с клавиатуры дисплея и их фиксация на дисплее и устройстве печати;
сопряжение с видеотерминалами, устройствами печати и другими средствами из состава СМ ЭВМ по интерфейсам и ИРПС.
Каждому комплексу в сети присваивается свой номер (адрес).
Связь между комплексами ведется в полудуплексном режиме, т.е. каждый аппарат передает информацию ТС, ТИТ, ТУ по мере ее возникновения (спорадический режим передачи), затем переходит в режим приема. Одновременная передача и прием информации невозможны. Передача и прием ведутся с помощью программируемых линейных модулей. Скорость передачи до 200 Бод.
Обмен информацией ведется путем подачи в канал связи определенным образом сформированных групп импульсных посылок, (сигналов), образующих кадр.
Кадр условно можно поделить на: префикс, служебную часть (заголовок), адресную часть, время, когда возникла информация, информационную часть и защитную часть, т.е. корректирующий остаток от деления всего блока на образующий полином.
Префикс содержит в себе: паузу (1 байт, содержащий 00) для разделения посылок; байт меандра (точки), используемый для синхронизации приемника по тактам; байт кода "СТАРТ" (72Н) для синхронизации приемника по байтам.
Заголовок включает: байт, содержащий значение длины передаваемого блока в байтах; байт, в котором кодируется вид передаваемой информации (служебная, данные, новая после рестарта информация); байт, несущий подтверждение или неподтверждение приема предыдущей посылки.
В адресной части передается: номер комплекса-отправителя, номер комплекса-получателя, тип параметра (ТС, ТИТ, ТИИ), адрес модуля, от которого передается сообщение, номер сообщения.
Время: передаются часы, минуты, секунды и миллисекунды возникновения передаваемого события (изменения параметра).
В информационной части передается: два байта состояния группы ТС (16 объектов) или 12 байтов значений параметров ТИТ (6 параметров по 2 байта) или передается до 16 значений интегральных ТИ.
Защитная часть содержит 2 байта остатка от деления содержимого кадра на образующий полином Х16 + Х12 + Х5 + 1. Делению на полином подвергается вся кодовая комбинация начиная с байта длины сообщения.
Кроме того, для обеспечения инерционной синхронизации на приемной стороне через каждые десять байт после окончания заголовка вставляется байт со значением 55Н (меандр).
Аппарат, принявший сообщение, в ответ должен перейти в режим передачи и выдать свое сообщение, аналогичное описанному, если к этому времени возникла такая необходимость. Если необходимости в передаче нет, т.е. нет информации, в ответ передается короткий кадр, несущий только сообщение о принятии или непринятии информации.
Содержание передаваемых кадров готовится центральным процессором, который управляет работой линейных модулей изменением содержания ячейки командного слова.
Линейный модуль, приняв команду, передает содержимое кадра в канал связи, дополняя его префиксом и контрольным остатком. При приеме кадра линейным узлом заполняется соответствующий буфер и, если кадр принят правильно, центральному процессору выставляется требование прерывания. По этому прерыванию центральный процессор считывает из памяти линейного модуля принятый кадр и принимает решение о дальнейшей работе.
При задании конфигурации системы каждый линейный модуль может быть поставлен в режим ведущего или ведомого. Если модуль ведущий, то он передает кадр и ждет ответа. Если модуль ведомый, он ставится в режим приема и ждет сообщений из канала связи.
5.1. Ориентация в базовом программном обеспечении
Аппаратные средства ТК-113 уже имели программы драйверов модулей ввода/вывода, но длительное время оставались без отработанного системного программного обеспечения, поэтому его разработка была поручена сторонней организации - Центральному научно-исследовательскому институту комплексной автоматизации (ЦНИИКА). В ТК-113 применяются многозадачная операционная система реального времени, входящая в БПО, и пакет пользовательских программ (ПО), обеспечивающих выполнение прикладных задач, разработанных в ЦНИИКА.
Использованы заводские без значительных изменений программы драйверов модулей связи с объектами и коммуникационных модулей.
Базовое ПО содержит общесистемные программы, часть пользовательских программ общего назначения, сервисные и контрольно-тестовые программы. Пользовательское ПО обеспечивает привязку комплекса к конкретным условиям эксплуатации.
Программное обеспечение комплекса ТК-113 предназначено для реализации следующих основных функций:
управление запуском прикладных программ в реальном масштабе времени;
управление работой аппаратуры комплекса при выполнении функций ввода, передачи, вывода, обработки, отображения телемеханической информации;
обеспечение возможности сервисного обслуживания комплекса.
В качестве носителей программного обеспечения комплекса заводом-изготовителем используются:
в аппаратуре ПУ - твердый диск;
в аппаратуре КП - микросхемы ППЗУ типов К573 РФ6 емкостью 8 кбайт.
Существует несколько версий модулей ППЗУ: модуль Т3700 на 128 кбайт с микросхемами К573 РФ4, модуль Т3701 - на 32 кбайт с микросхемами К573 РФ2 и модуль Т3700-04 с микросхемами К573 РФ6.
В коммуникационных модулях (передачи и приема) используются микросхемы в ППЗУ - КМ573 РФ2, в ОЗУ - КР537 РУ10.
Микросхемы ППЗУ на КП установлены в модуле Т3700-04. Следует учитывать, что в модуле используется 16-разрядная шина данных, в связи с чем микросхемы установлены парами - одна содержит четные байты, а другая - нечетные. Отличительной особенностью модуля является его способность обнаруживать двойные ошибки, а одинарные даже исправлять.
Время цикла, мкс, не более:
записи слова 1,0;
чтения слова 1,0;
записи байта 1,25;
чтения байта 1,0.
5.2. Оперативное запоминающее устройство, анализ причин повреждений
и методика их отыскания
Во время эксплуатации телемеханических комплексов ТК-113 выявились их характерные неисправности. К одним из таких неисправностей относятся частые случаи выхода из строя модулей оперативной памяти. В комплексе применяются три типа модулей ОЗУ:
Т3500 на 128 кслов (256 кбайт);
Т3501 на 16 кбайт;
Т3502 на 32 кбайт.
Модули ОЗУ предназначены для записи, хранения, считывания оперативной информации (программ, табличных данных и т.п.) и сохранения информации при отключении основных источников питания.
Разрядность слов - 22 бит (16 бит - информационные разряды, 6 бит - контрольные разряды). Внутренние защиты модулей позволяют исправлять одиночные ошибки и обнаруживать двойные.
Продолжительность сохранения записанной информации после отключения основных источников питания не менее 72 ч.
Во всех модулях применяются микросхемы К565 РУ5, имеющие организацию 64к х 1бит. Микросхемы удовлетворяют современным требованиям к ОЗУ (по быстродействию, объему хранимой информации, энергопотреблению, помехозащищенности и надежности), хотя до распайки на плате необходимо неукоснительное соблюдение правил обращения с микросхемами, особенно в отношении защиты от высоких потенциалов на входах. После установки на плате и правильно организованном алгоритме управления особого внимания микросхемы не требуют.
Главное требование в алгоритме управления микросхемами ОЗУ - неизменность потенциалов на входах микросхемы после подачи управляющего сигнала "выбор кристалла" (CS). Сигнал CS должен подаваться на микросхему последним (после изменений на адресной шине, шине данных и шине "чтение/запись"), а убираться первым.
Одновременного изменения сигналов на входах микросхемы ОЗУ следует избегать, так как при переходных процессах на шинах возможен разброс задержек сигналов, что может нарушить (незначительно) требуемый алгоритм управления. Конечно, сразу после этого микросхема не выходит из строя, но необратимые явления накапливаются и через некоторое время приведут к стойкому повреждению.
Стойкое повреждение микросхем ОЗУ, как правило, сопровождается повышенным нагревом корпуса. Эта особенность используется для экспресс-поиска неисправности.
Для обнаружения поврежденной микросхемы ОЗУ следует:
подать на устройство питающее напряжение;
не прекращая наблюдения, дать ему поработать несколько минут (при обнаружении задымления немедленно отключить питание устройства);
отключить питание;
отыскать микросхему, корпус которой заметно теплее остальных;
заменить найденную микросхему.
После замены микросхемы, как правило, работоспособность ОЗУ восстанавливается.
В том случае, когда найти поврежденную микросхему не удается, следует переходить к тестированию ОЗУ штатными средствами. До тех пор, пока в составе модуля находились заведомо неисправные микросхемы (шунтирующие адресные шины и/или шины данных), работа тестовых программ не могла быть эффективной.
Смысл работы программы тестирования сводится к последовательной записи в ячейки ОЗУ заданных кодовых комбинаций с последующим считыванием и сравнением результата считывания с исходной комбинацией. Для полноты проверки исходные комбинации в тексте инвертируются. Проверка проводится в следующем порядке:
запускается программа тестирования модуля памяти (согласно заводской документации);
при несоответствии записанного со считанным тест останавливается, указывая на адрес поврежденной ячейки;
по указанному адресу определяется физическое место микросхемы на печатной плате модуля;
производится замена найденной микросхемы.
Худший случай, когда повреждение микросхемы ОЗУ сопровождается шунтированием адресных шин и/или шин данных. В этом случае (если не удалось определить поврежденную микросхему по разнице в температуре корпусов) следует поступать таким образом:
секционировать ОЗУ на отдельные фрагменты;
наблюдать за состоянием шин осциллоскопом (при нормальной работе шин на них видны импульсы полной амплитуды);
последовательно подключать фрагмент за фрагментом;
тот фрагмент, который вызывает шунтирование шин (амплитуда импульсов резко уменьшится или импульсы исчезнут вовсе), содержит поврежденную микросхему.
Внутри выделенного фрагмента поиск поврежденной микросхемы производится аналогично описанному выше способу.
Разбивку на секции (фрагменты) следует производить по длине шины (адресной или шины данных), на которой обнаружено шунтирование, не затрагивая соседних участков модуля ОЗУ. Разбивка производится надрезкой дорожек печатной платы (ланцетом или микрофрезой).
После выявления поврежденной микросхемы:
заменить микросхему заведомо исправной;
восстановить порезанные места пайкой (участок зачистить и на него нанести каплю припоя; пайку производить бескислотным флюсом по правилам работы с микросхемами, изложенным ниже);
промыть спиртом место пайки;
соблюдать аккуратность при установке модуля в каркас.
5.3. Аппаратные средства, анализ причин повреждений и методика их устранения
К другим характерным неисправностям относятся повреждения элементов блоков питания.
В комплексе применяются "бестрансформаторные" блоки питания с импульсным регулированием выходного напряжения.
Блоки питания состоят из трех модулей:
модуль сетевого фильтра – Т0303;
модуль преобразователя +5 В - Т0301;
модуль преобразователя ±12 В - Т0302.
Напряжение сети поступает на фильтр, в котором подавляются высокочастотные составляющие.
Далее переменное напряжение 220 В выпрямляется в постоянное 310 В, которое поступает на входы модулей-преобразователей Т0301 и Т0302.
До подачи питающего напряжения на стабилизатор необходимо:
тщательно осмотреть монтаж;
убедиться в качестве паек (место пайки должно быть прогрето, припой должен "смочить" и саму деталь, и проводящую дорожку);
обратить внимание на внешний вид деталей (детали не должны иметь следов перегрева);
включить питающее напряжение;
проверить соответствие выходных напряжений стабилизатора заводским техническим данным.
Иногда такого обследования бывает достаточно для обнаружения неисправности и восстановления работоспособности блока.
В отличие от стабилизаторов напряжения с непрерывным регулированием устройство стабилизаторов с импульсным регулированием значительно сложнее. Проверка элементов импульсного стабилизатора возможна лишь во время его работы.
Необходимым условием работы импульсного стабилизатора является его "возбуждение". В ТК-113 применен импульсный стабилизатор с независимым (от автономного генератора) возбуждением.
В наиболее тяжелых условиях работает узел коммутации постоянного тока в модулях преобразователей. Обычно ему приходится коммутировать ток напряжением более 310 В (220 В + 15% = 253 В х 1,41 = 357 В амплитудного значения). В режимах отсечки (открыт или заперт) на коммутирующем элементе выделяется сравнительно небольшая мощность. Наибольшая мощность выделяется в момент переключения (когда напряжение на коммутирующем элементе составляет половину питающего).
Для уменьшения рассеиваемой на коммутирующем элементе мощности необходим управляющий сигнал с крутыми фронтами и амплитудой, достаточной как для надежного насыщения коммутирующего элемента, так и для его надежного запирания. При проверке работы стабилизатора следует обратить внимание на температуру коммутирующих элементов. При сильном нагреве необходимо:
проверить амплитуду управляющего сигнала (на входной обмотке согласующего трансформатора сигнал должен иметь амплитуду, близкую к питающему напряжению);
проверить частоту управляющего сигнала (частота должна быть в пределах 20 - 30 кГц);
проверить форму управляющего сигнала (фронты импульсов должны быть менее 2 - 3 мкс).
Поскольку коммутирующие элементы находятся в тяжелых условиях работы (особенно по напряжению) не следует стабилизатор с импульсным регулированием оставлять без нагрузки. Без внешней нагрузки на фронтах импульсов возникают перенапряжения из-за ЭДС самоиндукции силового трансформатора, что, как правило, приводит к электрическому пробою коммутирующих элементов. Но даже, если пробоя не произошло, успокаиваться не стоит. Элементы как бы истощают собственные ресурсы прочности и в следующий раз могут выйти из строя при меньших (менее номинальных) нагрузках.
Все источники напряжений применяемых в ТК-113 блоков питания имеют узлы защиты от коротких замыканий. При настройке элементов защиты следует:
нагрузить источник на реостат (реостат должен быть достаточно мощным, чтобы выдерживать ток, близкий к току короткого замыкания);
включить последовательно с реостатом амперметр на 20 А;
следить за приращением тока постепенно уменьшая сопротивление реостата.
При определенном значении тока (для различных источников значения будут разные) защитные элементы отключат источник питания;
сравнить последнее значение тока нагрузки с записями в журнале проверок и (при большом расхождении результатов) произвести подстройку узлов защиты с помощью имеющихся органов регулирования;
повторить испытания снова, перед испытаниями нужно:
после действия защит для повторного запуска источника отключить питание блока от сети;
примерно через 15 с включить его вновь (при работе защит в блоке питания "поджигается" тиристор, погасить который можно только сняв с него питание).
При эксплуатации ТК-113 имели место случаи ложного срабатывания защиты от перенапряжения из-за некачественного монтажа (такая защита в блоке питания имеется).
Особенно затруднен поиск неисправности, когда все необходимые сигналы присутствуют, но не выдержаны необходимые параметры этих сигналов.
Например, при выходе из строя коммутирующего высоковольтного транзистора (после многократной его замены) оказалось, что амплитуда управляющего транзистором сигнала из-за межвиткового замыкания в согласующем трансформаторе была недостаточной. Это приводило к плохому насыщению транзистора и (как следствие) к его перегреву и выходу из строя.
Кроме элементов, имеющих непосредственное отношение к функции питания, в блоке размещены узлы начальной установки (стартовой последовательности) программируемых модулей. Замечено, что эти узлы не обладают надежностью. Приходилось включать аппаратуру несколько раз прежде, чем сработают узлы начальной установки и состоится запуск комплекса.
В процессе проверки выяснилось, что диапазон регулировок в схемах начальной установки недостаточен и не способен компенсировать изменений импульсов стартовой последовательности при колебаниях питающей сети в разрешенном диапазоне (+10÷ - 15%).
Для стабильной работы узлов запуска следует изменить параметры элементов регулирования с тем, чтобы скомпенсировать изменения сигналов, связанные с колебаниями питающего напряжения.
Сходное положение обстоит и с дисплеем. В качестве дисплея в ТК-113 использовался бытовой цветной телевизор, работающий в принятом для ТВ стандарте - 50 полукадров/с. Кроме трех сигналов цветности на вход дисплея по отдельному кабелю подается сигнал синхронизации с частотой импульсов 60 Гц (так принято в ТК-113).
Запаса регулировок частоты кадров не хватает. Даже, если и удается удержать кадр на экране, то происходит это при крайнем положении потенциометра частоты кадров. При изменении питающего напряжения кадры выходят из синхронизации.
Для устранения дефекта необходимо увеличить значение сопротивления резистора, включенного последовательно с потенциометром частоты кадров, для чего:
вместо последовательного резистора включить переменный потенциометр сопротивлением в два раза большим;
потенциометр частоты кадров установить в среднее положение;
изменяя сопротивление переменного резистора, добиться устойчивой синхронизации кадров на экране дисплея;
выпаять переменный резистор (не изменяя положения его движка);
измерить значение сопротивления выпаянного потенциометра и впаять вместо него эквивалентный постоянный резистор;
убедиться (поворотом в обе стороны потенциометра частоты кадров) в наличии запасов регулирования.
6. Телекомплекс МПТК, техническая характеристика
Микропроцессорный телемеханический комплекс (МПТК) предназначен для построения интеллектуальной системы сбора, обработки, передачи и отображения телеинформации в энергетике и других отраслях.
Телемеханический комплекс обеспечивает выполнение следующих функций:
ввод текущих значений параметров (ТИТ);
ввод интегральных значений параметров (ТИИ);
ввод состояния двухпозиционных объектов (ТС);
телеуправление двухпозиционными объектами (ТУ);
отображение информации ТС и ТИТ на диспетчерских щитах;
первичная обработка информации (суммирование, масштабирование, фильтрация, сжатие);
ретрансляция всех видов информации;
передача ЦБИ;
регистрация аварийных событий с метками времени (PC);
обмен информацией с оперативно-информационным комплексом (ОИК);
обмен информацией с АСУ ТП энергообъектов.
Максимальная информационная емкость (может быть увеличена путем изменения программного обеспечения):
ввод ТС - 192;
ввод ТИТ - 192;
ввод ТИИ - 192;
вывод ТУ - 128;
число каналов приема на ПУ - 40;
число каналов ретрансляции - 4;
прием и обработка ТС на ПУ - 2000;
прием и обработка ТИТ на ПУ - 2000;
отображение ТС - 1000;
отображение цифровых ТИТ - 100;
отображение аналоговых ТИТ - 32;
ретрансляция ТС - 256;
ретрансляция ТИТ - 256.
Типы диспетчерских щитов - световой, полусветовой, мимический.
Скорость передачи информации - 50, 100, 200, 300, 600, 1200 Бод (до 19200 Бод при развитии ПО).
Тип каналов связи - уплотненные, физические.
Структура каналов связи - радиальная, магистральная, транзитная.
Режим передачи - синхронный, асинхронный.
Элементная база - микропроцессорные серии 1810, 1816, 1821, БИС серий 580, 1818, 573, 537, 1108, 1113, микросхемы серий 555, 1533, 561, оптроны, транзисторы и др.
Большая часть устройств комплекса выполнена по типовой структуре универсальных многомодульных микроЭВМ. Исключение составляют программируемые контроллеры диспетчерского щита, которые имеют одноплатную структуру. Аппаратная логика предельно упрощена. Вся обработка информации выполняется программным путем. Структура устройств МПТК - многопроцессорная. Для выполнения коммуникационных задач и ряда функций используются специально разработанные программируемые адаптеры со своим процессором и памятью.
Основными типами устройств комплекса МПТК являются устройство КП и устройство ПУ. Кроме того, предусматриваются конфигурации головного КП - ГКП и транзитного КП - ТКП.
Конфигурация ГКП предназначена для диспетчерского пункта, расположенного непосредственно на энергообъекте, например, для диспетчерского пункта РЭС в здании подстанции или для головной станции каскада ГЭС. Головной КП совмещает в одном устройстве функции КП и ПУ и имеет соответствующий набор технических и программных средств.
Конфигурация ТКП также совмещает функции КП и ПУ. В качестве ПУ ТКП осуществляет обмен информацией с нижестоящими КП, ретранслируя их информацию на вышестоящее устройство. Соответственно ТКП (как и ПУ) имеет канальные адаптеры - сателлиты.
Отображение информации и обмен с ОИК не входят в функции ТКП.
Основным процессорным модулем является канальный адаптер КА. Он содержит микропроцессор 1821ВМ85, ППЗУ с ультрафиолетовым стиранием К573РФ6 емкостью 8 кбайт, ОЗУ К537РУ10 емкостью 2 кбайт, два таймера К580ВИ53, две двухканальные микросхемы последовательного интерфейса 1818ВГ01 (Intel 8274).
Один модуль КА реализует 4 независимых дуплексных канала со скоростью до 1200 Бод (с развитием программного обеспечения максимальная скорость может быть повышена до 19200 Бод).
Каждый канал может работать как в асинхронном, так и в синхронном режиме.
Модуль КА имеет два исполнения: центральный модуль КА и адаптер - сателлит. Исполнение задается перемычками на плате модуля. Центральный модуль КА (всегда один на устройство) выполняет функции центрального процессора и управляет работой всех остальных модулей, в том числе адаптеров - сателлитов. Обмен информацией между центральным модулем КА и сателлитами осуществляется через общие поля памяти путем прямого доступа со стороны центрального КА к внутренней магистрали адаптеров - сателлитов.
Внешние входные и выходные цепи КА имеют характеристики электрических сигналов, соответствующие стыку С2-ИС (RS-232). Выходные цепи снабжены ключами, которые управляются от арбитра "основной - резервный" и позволяют без дополнительных коммутаторов построить резервированное устройство ПУ. Каждый канал имеет основной и резервный входы для работы по резервированным каналам; коммутация входных цепей осуществляется программным путем селективно для каждого канала.
Для обеспечения возможности повышения производительности в комплексе предусмотрен модуль ЦП на основе 16-разрядного микропроцессора К1810ВМ86. Магистраль, реализованная на объединительной плате, обеспечивает как 8-разрядный, так и 16-разрядный обмен. Известный в настоящее время набор задач телемеханического комплекса с большим запасом ресурса реализуется процессором 1821ВМ85, и все программное обеспечение ориентировано на выполнение функций центрального процессора модулем КА.
Мультиплексный адаптер МА является интеллектуальным модулем параллельного интерфейса. Он содержит такой же процессор и такой же объем памяти, как КА, а также один таймер К580ВИ53 и две микросхемы параллельного интерфейса К580ВВ55. Адаптер МА аналогично КА может выполнять функции центрального процессора, но в разработанном комплексе программного обеспечения используется только как сателлит.
Адаптер МА имеет 32 входных и 16 выходных цепей. Выходные цепи имеют характеристики электрических сигналов, соответствующие стыку С2-ИС (RS-232). Входные цепи имеют специальные резистивно-диодные делители и могут с помощью перемычек настраиваться на разные диапазоны сигналов - ТТЛ, RS-232 и другие.
Адаптер МА используется как многофункциональный модуль. На его основе реализуются функции ввода ТИИ от импульсных датчиков, ввода информации от частотомера Ф246 (и подобных), регистрации аварийных событий с использованием модулей PC, а также многоканальный обмен по каналам связи со скоростью до 200 Бод на основе программной реализации операций битового уровня и тактовой синхронизации приема.
Модуль ЗУ используется в устройствах ПУ и ГКП для расширения объема памяти. Модуль ЗУ имеет емкость 32 кбайт и содержит 4 блока памяти по 8 кбайт. Каждый блок может использоваться либо как ППЗУ (4*К573РФ6) либо как ОЗУ (4*К537РУ10).
Модуль синхронизаторов СХ содержит 5 одинаковых независимых узлов фазовой автоподстройки, которые формируют тактовые сигналы для приема информации в синхронном режиме модулями КА. Синхронизаторы модуля СХ присоединяются к требуемым каналам модулей КА через разъемы внешних связей.
Модуль ГР содержит 4 одинаковых независимых узла гальванической развязки, предназначенных для работы по физическим каналам связи в условиях, когда нулевые шины устройств комплекса не могут быть объединены, например, когда устройства находятся в разных зданиях. Уровень изоляции гальванической развязки составляет 1,5 кВ.
Модуль ТС служит для ввода информации о положении двухпозиционных коммутационных аппаратов. Емкость модуля - 32 сигнала ТС. Входные цепи изолированы от логической схемы устройства, но имеют общую шину (отрицательный полюс) для всех модулей ТС, входящих в данное устройство. Уровень изоляции составляет 1,5 кВ. Напряжение на разомкнутом контакте не ниже 12 В, ток через замкнутый контакт 5 мА.
Модуль ТС обеспечивает возможность контроля исправности кабеля, соединяющего контакт - датчик ТС с устройством. Для этого необходимо шунтировать датчик ТС резистором сопротивлением 3 кОм.
Модуль ТИ служит для ввода информации от аналоговых датчиков - измерительных преобразователей с диапазоном выходного сигнала 0-5 мА или – 5÷0÷+ 5 мА. Входное сопротивление 1 кОм. Модуль содержит 10-разрядный аналого-цифровой преобразователь (АЦП) и 32-канальный коммутатор. В основном варианте модуль обеспечивает ввод 32 параметров ТИ при объединении одного полюса всех входных цепей.
Модуль обеспечивает также возможность дифференциального подключения датчиков при потенциалах всех входных цепей не более +12 В и не менее -12 В относительно нулевой шины устройства. Дифференциальное подключение входных сигналов ТИ обеспечивает аппаратную совместимость комплекса МПТК с существующей на момент внедрения информационной системой. Емкость модуля при дифференциальном подключении датчиков - 16 параметров ТИ.
Модуль ТУ служит для вывода команд телеуправления через блок реле БРТУ. Емкость модуля - до 64 объектов ТУ, число присоединяемых блоков БРТУ - до 4. Перед выводом команды ТУ производится проверка исходного состояния - все реле должны быть отключены. При выводе команды вначале выполняется предварительная операция - включение объектного реле ТУ и контроль правильности его выбора. При положительном результате проверки выполняется исполнительная операция - включение реле характера операции. Блок БРТУ построен на реле РП-21 и имеет традиционную схему выходных цепей: тройник ВК-ОТ плюс блокировка АПВ.
Модуль ЦАП служит для вывода параметров ТИ в аналоговой форме. Емкость модуля - 16 каналов. Диапазон выходного сигнала 0-5 мА при сопротивлении нагрузки до 2,5 кОм.
Модуль PC служит для ввода сигналов защиты и автоматики для регистрации аварийных событий. Емкость модуля - 8 дискретных сигналов. Напряжение на разомкнутом контакте не ниже 24 В, ток через замкнутый контакт - 10 мА. Модуль PC является единственным модулем комплекса, выполненным на печатной плате размером 160x100, и устанавливается в специальный шкаф ШБ1-РС. Модуль PC осуществляет гальваническую развязку входных цепей от схемы.
Уровень изоляции составляет 1,5 кВ. Выходными элементами модуля являются транзисторы, соединенные в матричную схему, которая опрашивается мультиплексным адаптером МА.
Модуль МС представляет собой модем, встраиваемый в устройства комплекса МПТК. Модем использует фазовую модуляцию и позволяет организовать в надтональном спектре 2300-3400 Гц один дуплексный канал со скоростью 600 Бод или два канала со скоростью 200 Бод. Модуль МС построен на основе однокристального контроллера К1816ВЕ31.
В комплексе МПТК протоколы обмена информацией реализуются программным путем. Поэтому имеется возможность программирования под любой протокол для сопряжения с любым комплексом или устройством телемеханики. Важнейшими из таких протоколов, часто применяемыми в информационных системах в энергетике, являются следующие:
асинхронный протокол обмена с ЭВМ ОИК;
синхронный протокол RPT-АИСТ;
синхронный протокол ТМ-512;
синхронный протокол МКТ-3;
синхронный протокол "Гранит";
синхронный протокол ТМ-120.
Специально разработанными для комплекса МПТК протоколами обмена являются следующие:
асинхронный протокол обмена с комплексом средств отображения информации (КСОИ);
асинхронный протокол обмена между устройствами комплекса на основе формата FT1.2, описанного в международных стандартах 870-5-1 "Форматы передачи" и 870-5-2 "Процесс передачи по линиям", рекомендованного 57 Техническим комитетом МЭК и вошедшего в ГОСТ Р МЭК 870-2.
Протокол является универсальным при использовании различных типов каналов связи радиальных, магистральных (цепочечных), кольцевых и любых комбинаций этих структур.
Протокол на основе формата FT1.2 является асинхронным с пословной стартстопной передачей. Формат слова Е, 8, 1, т.е. 8 информационных бит с контрольным битом проверки на четность и одним стоп-битом, причем пустые интервалы между байтами одного информационного блока должны отсутствовать. Предусмотрено использование следующих видов информационных блоков:
блоки переменной длины, начинающиеся байтом START1 = = 68h; .
блоки фиксированной длины, начинающиеся байтом 1 Oh, E5h или A2h. .
Блок переменной длины может содержать от 0 до 255 информационных байтов. Их количество передается дважды сразу после START1 и затем снова передается START1, после чего передается содержательная часть блока. Блок фиксированной длины может содержать любое число информационных байтов, но обязательно заранее известное приемнику. Блоки переменной и фиксированной длины заканчиваются байтом контрольной суммы и стоп-байтом END = 16h.
Приведенный набор правил передачи обеспечивает кодовое расстояние d = 4, что гарантирует обнаружение любых искажений кратности 3 и менее. При этом ошибки, не вызывающие нарушения синхронизации, обнаруживаются за счет двухкоординатной проверки по строкам (контроль четности в байтах) и по столбцам (контрольная сумма). Выбор констант START и END и отсутствие интервалов между байтами в блоке гарантируют при кратности искажения менее 4 обнаружение ошибок, связанных с ложным "стартом" или подавлением "старта" в каком-либо байте, т.е. с нарушением синхронности.
Приняв телеграмму указанной структуры, БКЩ - адресат посылает в магистральный обратный канал однобайтную квитанцию, содержащую его адрес. Благодаря этому ПУ имеет возможность контроля исправности БКЩ и канала связи.
Кроме информационных телеграмм ПУ посылает управляющие телеграммы, которые также имеют формат 4 байта. Для них резервирован нулевой адрес БКЩ. Адресат указывается вторым байтом управляющих телеграмм.
В протоколе FT 1.2 реализуется иерархическая система единого времени. Сверху вниз по иерархии передаются два вида информации, относящиеся к системе единого времени: установка и коррекция. Установка является полноформатной передачей показаний часов (календаря) и выполняется сравнительно редко - с интервалом в десятки минут, а также после потери и последующего восстановления связи, например, после рассинхронизации или рестарта. Коррекция служит для поддержания точного хода часов во всех аппаратах и имеет неявный характер: само значение времени не передается, но все телеграммы передаются в заданные моменты времени, а коррекция производится по моменту их приема с учетом времени передачи при определенной скорости.
Применение протокола передачи в соответствии с форматом FT1.2 МЭК дает удовлетворительную достоверность при передаче ТС - ТИТ - ТИИ, а также блоков ЦБИ различного назначения. Достоверность, обеспечиваемая при кодовом расстоянии d = 4, недостаточна при передаче команд ТУ. Для достижения требуемой достоверности реализована дополнительная защита, обеспечивающая в сочетании с защитой FT1.2 кодовое расстояние 6.
6.1. Ориентация в базовом программном обеспечении
Технологические процессы в энергетике обязывают производить сбор, обработку и представление телемеханической информации в реальном масштабе времени, следовательно, работа телемеханического комплекса должна осуществляться под управлением (в среде) операционной системы реального времени (ОСРВ). Отличительной чертой ОСРВ является быстрая (и предсказуемая) реакция на внешние и внутренние возмущения (прерывания). Кроме того, ОСРВ ТК должна быть многозадачной, т.е. способной "одновременно" вести управление несколькими процессами.
Распространенные в ПЭВМ дисковые операционные системы (DOS) не отвечают предъявляемым требованиям.
В настоящее время широко применяются операционные системы реального времени типов OS-9, UNIX и др. Указанные операционные системы прошли проверку временем и используются в проектах многих ведущих западных фирм, т.е. являются ОСРВ коллективного использования, что исключает зависимость заказчиков от конкретных программистов - разработчиков. Конечно, использование этих ОСРВ требует определенных затрат на приобретение лицензии на их применение, но при этом появляется возможность сотрудничества в области программирования.
Для МПТК во ВНИИЭ была разработана собственная операционная система реального времени - ОСМТК. Программное обеспечение МПТК состоит из базового и пользовательского ПО. Базовое ПО содержит общесистемные программы, часть пользовательских программ общего назначения, сервисные и контрольно-тестовые программы. Пользовательское ПО обеспечивает выполнение прикладных задач. Программное обеспечение комплекса открыто для дальнейшего расширения.
Кроме программ ПО включает в себя комплект таблиц исходных данных, обеспечивающих привязку комплекса к конкретным условиям эксплуатации.
Таблицы исходных данных должны постоянно обновляться эксплуатационным персоналом по мере изменения тех или иных характеристик собираемой и обрабатываемой информации. Изменения в работающих программах и включение в состав ПО новых программ должны производиться только квалифицированными программистами, хорошо представляющими распределение вычислительных ресурсов (памяти, времени процессора) и взаимодействие программ между собой и с операционной системой.
В качестве носителей программного обеспечения комплекса используются микросхемы ППЗУ типов К573РФ2 емкостью 2 кбайт и К573РФ6 емкостью 8 кбайт. Микросхемы ППЗУ могут быть установлены в разъемы модулей КА, МА и ЗУ.
Для облегчения ориентации в программном обеспечении МПТК приведены основные программы, выполняемые центральными модулями КА различных устройств комплекса (табл. 4).
Таблица 4
Программа | Режим выполнения функции | Использует | Создает | |
ПЗУ | ОЗУ | ОЗУ | ||
OSMTK | Операционная система реального времени осуществляет постоянное управление работой остального программного обеспечения: системная загрузка, обработка прерываний, | TAZRAM | ||
отслеживание астрономического времени (часы), | TAZFON | |||
обслуживание инженерного пульта, диспетчер периодических и фоновых задач (функция супервизора) | ТАРЕ | |||
ZAGR | Программа начальной загрузки работает после включения аппаратуры или после ее перезапуска (ручного или автоматического). | TAZ | TAZRAM | |
Загрузка: обнуление полей, выполнение прикладных пусковых блоков (выполняет программное задание режимов элементов ввода - вывода, а также установку начальных констант), | TAZFON | |||
пуск периодических и фоновых программ | ТАРЕ | |||
WTI | 5 ms - ввод ТИ с фильтрацией 50, 100 Гц | TKONTI | PWTI | |
WTS | 40 ms - ввод ТС с контролем обрыва цепей | TKONTS | PWTS | |
WRSEN | 640 ms – ввод регистратора событий и энергии от МА | TKNTII | KBRS PEN | |
FTSL | 5 ms - канальный драйвер протокола FT1.2 для обмена с вышестоящими пунктами | TFT | ||
PODGIN | fon - подготовка информации для FTSL | TFT | PWTS | BPD PWTI KBRS PEN |
OBRAB priem | fon - состоит из: копирования ТС-ТИ из КА в полные поля; изменения - в буфер для ЭВМ | TKONAD TADA | PTZS PTZI | PPTS PPTI KBEVM |
bitper | Битная перепаковка ТС | TBPER | PPTS | PTSPER |
summ | Формирование суммарных ТИ | TSUM | PPTI | PSUM |
fevm | Формирование bpd для KEVM | KBEVM ВСВРМ | bpd | |
Разборка bpm от KEVM | bpm | OBPD PPTS/I DPOTS/I | ||
gendp | Генерация двойных полей ретрансляции и отображения | TARETS TARETI TAOTS TAOTI | PPTS PPTI | DPRET DPOTS DPOTI |
retr | Подготовка ТС-ТИ для ретрансляции | DPRETS DPRETI | PTRS PTRI | |
gotkp | Обработка сигналов готовности (аварии) каналов связи (КП) | TLMPA | sosk | DPOTS |
OTOB | 40 ms - подготовка информации для КОI | TATS | DPOTS | BOTO |
Разборка PKL | TATI | DPOTI PKL | OBPD | |
VTI | 640 ms - аналоговый вывод ТИ | ТКСАР | PPTI | |
KEVM | 5 ms - канальный драйвер обмена с ЭВМ | bpd | bpm | |
KOI | 5 ms - канальный драйвер обмена с КСОИ | BOTO | PKL | |
WTI - особенностью данной прикладной программы является наличие в ней встроенного программного фильтра промышленной частоты (50 Гц).
На КП энергетических объектов со многими высоковольтными источниками помех промышленной частоты уровень этих помех велик.
Помехи воздействуют на входные цепи ТИ, что вызывает разброс в отсчетах показаний в то время, как измеряемый параметр при этом фактически не изменяется.
Для качественной фильтрации промышленной частоты (измерительные цепи) требуются фильтры с большой постоянной времени. Применение электролитических конденсаторов в фильтрах недопустимо, так как их значительный ток утечки сильно зависит от температуры и не может быть учтен, что приводит к дополнительной температурной погрешности. Кроме того, с параметрическими фильтрами ухудшаются динамические характеристики тракта ТИ. Экранирование входных цепей ТИ трудно реализовать из-за дороговизны.
Благодаря применению быстродействующих АЦП стало возможным производить несколько измерений за один период промышленной частоты.
В МПТК за один период промышленной частоты производится четыре отсчета показаний через 5 мс каждое. Результат измерений усредняется. При таком способе измерения гарантированно совпадают как с положительной, так и с отрицательной полуволнами синусоиды промышленной частоты. Усредненный результат соответствует только постоянной составляющей измеряемого параметра. Выбранный период измерений (5 мс) позволяет эффективно фильтровать не только помеху 50 Гц, но и помеху с частотой 100 Гц (вторая гармоническая составляющая промышленной частоты). Динамические характеристики измерительного тракта при этом сохраняются.
WTS - особенностью данной прикладной программы является наличие целостности цепи ТС.
Микропроцессорный телемеханический комплекс способен различать не два (как это было в старых устройствах ТМ), а три состояния сигнальной цепи. Третье состояние организуется шунтированием контакта объекта ТС относительно высокоомным резистором. В этом случае даже при разомкнутом контакте объекта ТС по сигнальной цепи протекает начальный ток, воспринимаемый устройством как исправное состояние сигнальной цепи при отключенном объекте ТС. После замыкания контакта объекта ТС сопротивление цепи резко уменьшается, что воспринимается устройством ТМ как включенное состояние объекта ТС. Полное отсутствие тока в сигнальной цепи фиксируется устройством ТМ как повреждение, что будет позже выявлено при работе тестовых программ.
6.2. Меры по обеспечению надежности телекомплекса
В телекомплексах большое значение приобретает вопрос обеспечения высокой надежности. Особенно это относится к аппаратуре ПУ, так как при повреждении какого-либо аппарата КП теряется только часть информации, а при повреждении аппаратуры ПУ, исполняющей функции ЦППС, можно лишиться всей информации. Это относится и к КСОИ.
Для обеспечения высокой надежности и живучести комплекса принят ряд специальных мер. К важнейшим из них относятся:
наличие в каждом устройстве и контроллере "сторожа", обеспечивающего автоматический рестарт при "зависаниях";
резервирование устройства ПУ с арбитражем "основной-резервный";
аппаратная и программная поддержка резервных каналов связи;
резервирование магистрали связи с КСОИ;
автоматический контроль цепей ввода и вывода ТС;
автоматический контроль цепей ввода и вывода ТУ;
защита программ ТУ от аппаратных и программных сбоев;
работа программ автодиагностики в реальном времени.
Неисправности, связанные с программными сбоями и "зависаниями", не всегда могут быть разрешены программным образом, так как сервисные программы-арбитры могут оказаться поврежденными сами. В таких случаях необходим аппаратный "сторож", который сохраняет пассивность до тех пор, пока служебная программа (могут быть использованы "часы") периодически "подкармливает" "сторожа". Очень важно, чтобы "сторож" реагировал не на "нуль" или "единицу" (в одном из таких состояний и останавливается устройство при повреждении), а на переход из "нуля" в "единицу" и/или наоборот. Важно реагировать на динамику процесса.
При длительном отсутствии "подпитки" "сторож" переходит в активное состояние, что вызывает рестарт комплекса.
Во время эксплуатации устройств возникает необходимость в проверке элементов защиты.
Для проверки работы "сторожа" нужно:
записать в прикладное ПО сервисную задачу с самозацикливанием (в такой задаче после ее выполнения управление процессором не передается "системе", а возвращается на вход этой же задачи: процесс зацикливается);
однократно запустить с инженерного пульта ранее записанную в прикладное ПО сервисную задачу с самозацикливанием;
наблюдать отработку рестарта.
При отсутствии рестарта необходимо попытаться заменить модуль на резервный (если он имеется) и повторить проверку. По результатам проверки принять необходимые действия.
При проверке работы арбитра двухмашинного комплекса ("основной-резервный") необходимо "согнать" процесс обработки с действующей в данный момент машины на другую. Для этого:
отключить питание действующей машины;
убедиться, что переход на другую машину состоялся и принимаемая информация обновляется (что быстро обнаруживается по изменениям ТИТ).
При проверке функции смены каналов связи следует:
отключить (или зашунтировать) один из каналов связи;
убедиться в нормальной работе комплекса (по факту обновления информации с данного направления);
отключить (или зашунтировать) другой канал связи;
убедиться в продолжении нормального функционирования комплекса (смена канала связи устанавливается по факту обновления информации с данного направления).
Аналогично необходимо проверить резервирование магистральных линий КСОИ следующим образом:
отключить одну из магистральных линий;
осуществить контроль нормальной работы средств отображения информации (по факту обновления информации);
отключить другую магистральную линию;
убедиться в прекращении выполнения функции отображения;
включить первую (ранее отключенную) магистральную линию;
убедиться в нормальной работе средств отображения информации;
оставить включенными обе магистральные линии.
Работу узлов автоматического контроля цепей ввода-вывода следует осуществлять в таком порядке:
подключить к комплексу инженерный пульт (согласно заводской документации);
отключить шунтирующий резистор на контакте ТС.
Инженерный пульт укажет поле поврежденных цепей ТС;
возвратить на место шунтирующий резистор и вынуть из символа выключателя сигнальную лампу. Инженерный пульт указывает поле неисправных ламп.
Для автоматического контроля состояния цепей ввода-вывода ТУ следует:
отключить реальные объекты управления;
сформировать команду управления (включить/отключить) отключенным объектом;
убедиться в исполнении переданной команды (тестером на соответствующих управляемому объекту выходных рядах зажимов по факту замыкания контактов на 2 с);
сымитировать повреждение реле (путем насильственного его удержания в требуемом положении);
повторно сформировать команду управления (включить/отключить);
убедиться в неисполнении команды;
освободить реле и установить контрольную плату с заранее внесенными в нее повреждениями;
сформировать команду управления (включить/отключить);
убедиться в неисполнении команды;
восстановить первоначальную схему;
убедиться в исполнении переданной команды (тестером на соответствующих управляемому объекту выходных рядах зажимов по факту замыкания контактов на 2 с);
включить реальные объекты телеуправления.
6.3. Методика использования сервисных средств
Разработка МПТК начиналась в то время, когда ПЭВМ еще не были так широко распространены.
Теперь сервисные средства целесообразнее реализовать на ПЭВМ (и по их возможностям, и по цене).
Для МПТК в то время сервисные средства были разработаны специально.
К сервисным средствам комплекса относятся инженерный пульт (ИП) и вспомогательные модули УП и КС, а также сервисные программы, предназначенные для обслуживания ИП, который является средством общения между персоналом и устройствами комплекса.
Инженерный пульт содержит:
16-разрядный цифровой индикатор;
16 светодиодов для индикации двоичной информации;
16 функциональных клавиш;
16 цифровых клавиш;
программатор для записи информации в микросхемы ППЗУ.
Важным свойством сервисных программ МПТК является то, что они выполняются под управлением системы реального времени и поэтому применимы во время работы комплекса прикладных программ. Во многих ТК при работе с сервисными средствами требуется останавливать рабочую программу.
Основными операциями, которые выполняются с помощью ИП, являются чтение ячеек памяти, запись в ячейки памяти, запуск программы с заданного адреса. Существенную помощь при анализе работы комплекса с помощью ИП показывает наличие периодического режима операций чтения и запуска программы.
При локализации неисправности и во время ремонта аппаратуры возникает необходимость доступа к элементам печатной платы.
В некоторых устройствах ТМ для наблюдения осциллограмм приходится многократно вынимать печатные платы из каркаса, чтобы подпаять контрольные провода к интересующим точкам схемы. Этот метод сопряжен с неудобствами и требует максимальной концентрации ремонтного персонала, чтобы по возможности сократить число операций.
Простая плата-переходник (тем более со жгутом) не всегда разрешает задачу, так как при неизбежном в этом случае увеличении паразитных емкостей и индуктивностей (заметных при больших скоростях обмена сигналами в современных устройствах) вынесенная на переходник исследуемая плата часто перестает работать.
При ремонте плат в МПТК следует пользоваться специально разработанным модулем УП, который позволяет вывести подлежащий проверке модуль за габариты материнского блока. Для уменьшения неприятных эффектов (связанных с удлинением "шины") в модуле установлены интерфейсные усилители. На модуле УП установлен дополнительный разъем, позволяющий подключать ИП.
При отладке и проверке работы программ прикладного ПО (собственных или штатных) необходимы инструментальные средства, позволяющие перевести работу процессора в пошаговый режим. Для этой цели в МПТК следует использовать контрольный модуль КС.
На лицевой панели КС с помощью светодиодов отображается текущее состояние интерфейсных шин.
Сервисные средства МПТК, кроме того, позволяют останавливать текущий процесс обработки информации по установленному на ИП адресу, что бывает полезно при выяснении причин сбоев в работе программ.
Сервисные программы предназначены для обслуживания ИП, который является средством общения между персоналом и устройством МПТК.
Сервисные программы условно можно разделить на две группы: машиноориентированные и технологически ориентированные. Запуск сервисных программ осуществляется с помощью клавиатуры ИП путем набора приказа, который содержит вид выполняемой функции и необходимые параметры. С целью упрощения сервисных программ принят следующий порядок ввода приказа: вначале вводятся цифровые параметры, а функциональная клавиша является одновременно исполнительной.
Основными сервисными программами являются программа чтения ячеек памяти RD (клавиша "ЧТ"), записи в ячейки памяти WR (клавиша "ЗП"), запуска программы с заданного адреса GO (клавиша "ПМ"). При работе программ RD и WR 16 цифровых индикаторов ИП используются следующим образом: 4 разряда указывают начальный адрес фрагмента памяти из 6 байт, содержимое которых индицируется остальными двенадцатью разрядами. Индикация производится в шестнадцатиричной форме. При выполнении операции записи очередной набираемый разряд указывается курсором - мигающей запятой. Набранные шестнадцатиричные цифры отмечаются запятыми (меточными курсорами) и заносятся в специальный буфер, а после нажатия клавиши "ЗП" переносятся в выбранные ячейки ОЗУ.
Для запуска программы с помощью клавиши "ПМ" необходимо набрать ее начальный адрес в первых четырех индикаторах, как и при операциях ЧТ и ЗП. Как уже указывалось, запускаемая клавишей "ПМ" программа реализуется операционной системой как подпрограмма и должна заканчиваться командой возврата. В некоторых случаях, в особенности при поиске аппаратных неисправностей, может использоваться запуск клавишей "ПМ", зацикленных на себя вспомогательных программ, не имеющих возврата. При этом обеспечивается лучшее наблюдение осциллограмм, но для выхода из этого режима требуется аппаратный сброс. Для удобства контроля и ввода данных и адресов служат функциональные клавиши:
→ курсор вперед;
← курсор назад;
А + - увеличить адрес на 1 и выполнить чтение;
А - - уменьшить адрес на 1 и выполнить чтение;
СТ --> - увеличить адрес на 6 и выполнить чтение;
СТ <-- - уменьшить адрес на 6 и выполнить чтение;
ОТ - очистить индикаторы пульта.
Еще три клавиши служат для выполнения специальных функций:
"ЦК" - циклическое выполнение операций ЧТ, ЗП, ПМ;
"ПГ" - программатор микросхем ППЗУ;
"КОП" - копирование области памяти в ОЗУ.
Остальные клавиши резервированы для технологически ориентированных сервисных программ.
В ПЗУ операционной системы расположена таблица адресов сервисных задач ТАВF, в которой каждой из 16 функциональных клавиш соответствует адрес сервисной программы. При нажатии на функциональную клавишу вычисляется в соответствии с кодом клавиши номер задачи в ТАВF и с помощью программы табличного перехода PERTAB управление передается по адресу, выбранному из таблицы.
При нажатии на цифровую клавишу подпрограмма CIFRA определяет место данной цифры на цифровом индикаторе, формирует байт данных для записи в буфер (начальный адрес BUF0-7) и передает данные подпрограмме INDIC. Подпрограмма INDIC производит запись данных в буфер индикации BIND с перешифровкой для отображения в семисегментном коде на цифровых индикаторах. Затем 16 байт из BIND пересылаются в контроллер клавиатуры и индикатора и отображаются на индикаторе.
Программа обслуживания программатора PGRM предназначена для программирования микросхем ППЗУ К573РФ4 (К573РФ6) данными из оперативной или постоянной памяти ЦП. Программа может читать и сравнивать содержимое программируемой микросхемы с содержимым какой-либо области оперативной или постоянной памяти. Предусматривается работа не только с полным объемом информации в микросхеме ППЗУ, но и с любой частью этого объема.
Характеристики программы PGRM:
1. Программа выполняет несколько задач:
проверка на чистоту, т.е. отсутствие логических нулей в программируемой микросхеме, задача FREE, номер задачи - 0;
чтение программируемой микросхемы ППЗУ в ОЗУ ЦП, задача RROM, номер задачи - 2;
проверка на программируемость, т.е. возможность записи логических нулей и единиц в требуемые ячейки, задача WROP, номер задачи - 3;
сравнение записанной информации с информацией в ОЗУ или ПЗУ, задача WROP, номер задачи - 4;
запись в объеме до четырех кбайт с проверкой на программируемость, задача WROP, номер задачи - 5.
Номер задачи является одним из входных параметров программы и в зависимости от него программа совершает переход на заданную задачу. Время программирования одного байта составляет 50 мс. Заказ на выполнение требуемой задачи программы PGRM устанавливается на цифровом табло пульта (табл. 5).
Таблица 5
Номер | Расположение данных на индикаторах пульта | |||||||||||||||
задачи | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 |
1 | Начальный адрес области памяти проверяемой микросхемы | Конечный адрес области памяти проверяемой микросхемы | 0 | 1 | ||||||||||||
2 | Начальный адрес области памяти ППЗУ, откуда переписывается информация | Конечный адрес области памяти ППЗУ, откуда переписывается информация | Начальный адрес ЦП в ОЗУ, куда переписывается информация | 0 | 2 | |||||||||||
3 | Начальный адрес области памяти ОЗУ или ПЗУ, которая подлежит сравнению | Конечный адрес области памяти ОЗУ или ПЗУ, которая подлежит сравнению | Начальный адрес проверяемой области памяти ППЗУ | 0 | 3 | |||||||||||
4 | Начальный адрес области памяти ОЗУ или ПЗУ, которая подлежит сравнению | Конечный адрес области памяти ОЗУ или ПЗУ, которая подлежит сравнению | Начальный адрес сравниваемой области памяти ППЗУ | 0 | 4 | |||||||||||
5 | Начальный адрес области памяти ОЗУ или ПЗУ, которая подлежит записи | Конечный адрес области памяти ОЗУ или ПЗУ, которая подлежит записи | Начальный адрес записываемой области памяти ППЗУ | 0 | 5 | |||||||||||
2. Задача 1 (FREE) проверяет во всех ячейках заданной области памяти микросхемы ППЗУ наличия значений FF. При выполнении данного условия указанная область памяти является пригодной (чистой) для программирования и в результате на второй индикатор справа выводится символ.
3. Задача 2 (RROM) выполняется путем переноса данных из ППЗУ в ОЗУ, по окончании задачи на второй индикатор справа выводится символ.
4. Задача 3 (WROP) проверяет возможность записи данной информации из памяти ЦП в микросхему ППЗУ при наличии в ней ячеек, некоторые биты которых равны нулю. В случае возможности такой записи на второй индикатор справа выводится символ.
5. Задача 4 (WROP) осуществляет сравнение области памяти в программируемой микросхеме ППЗУ с заданной областью памяти ЦП. В случае полного совпадения данных в заданных областях памяти на второй индикатор справа выводится символ.
6. Задача 5 (WROP) производит программирование микросхем ППЗУ с заданного адреса содержимым памяти ЦП. Перед программированием происходит проверка на программируемость. После окончания записи программа автоматически переключается на выполнение задачи 4 (сравнение). При успешном результате сравнения на второй индикатор справа выводится символ.
При неуспешном выполнении задач 1, 3, 4, 5 имеют место:
наличие в какой-либо ячейке числа, отличного от FF;
невозможность записи в микросхему ППЗУ по указанному адресу;
несовпадение данных в заданных ячейках памяти.
На индикаторы выводятся следующие сообщения (табл. 6):
Таблица 6
Номер | Расположение данных на индикаторах пульта | |||||||||||||||
задачи | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 |
1 | Адрес первой ячейки ППЗУ, где есть данные, отличные от FF | Данные | 0 | 1 | ||||||||||||
2 | Адрес ячейки ЦП, содержимое которой нельзя записать в заданный адрес ППЗУ | Данные | Данные | Адрес ячейки ППЗУ, некоторые биты которой равны нулю | 0 | 3 | ||||||||||
3 | Адрес ячейки ЦП, содержимое которой не совпадает с содержимым заданного адреса ППЗУ | Данные | Данные | Адрес ячейки ППЗУ, содержимое которой не совпадает с содержимым ЦП | 0 | 4 | ||||||||||
7. Меры безопасности при эксплуатационном обслуживании телекомплексов
Работа с устройствами должна производиться с соблюдением требований "Правил технической эксплуатации электрических станций и сетей Российской Федерации: РД 34.20.501-95" (М.: СПО ОРГРЭС, 1996) и "Правил техники безопасности при эксплуатации электроустановок" (М.: Энергоатомиздат, 1989).
Работа с устройствами телемеханики разрешается персоналу, имеющему соответствующее действующее удостоверение о проверке знаний по технике безопасности, прошедшему специальное обучение и допущенному к самостоятельной работе с соответствующими устройствами.
Все шкафы устройств должны быть заземлены - все болты, имеющие маркировку "земля", должны быть надежно соединены с системой заземления данного объекта.
При работе с устройствами все операции, связанные с подключением (отключением) разъемов или проводов к рядам зажимов, заменой предохранителей, ламп и других комплектующих изделий субблоков, блоков и шкафов, производятся только на обесточенной аппаратуре.
При проведении монтажных и наладочных работ принять меры пожарной безопасности в соответствии с требованиями, инструкции по обеспечению пожарной безопасности.
Шкафы устройств должны быть надежно закреплены на стене или на панели. Для придания устойчивости панелям при открывании двери шкафа (или поворотной рамы) панели должны быть надежно прикреплены к закладным устройствам в полу или к временным приспособлениям (деревянным брускам, швеллеру); выступающая часть должна выходить за дверь шкафа не менее чем на 300 мм.
Внимание! Не допускается работа со шкафами без их надежного закрепления.
Не допускается применение нестандартных плавких вставок (предохранителей).
8. Эксплуатационные проверки (плановые ревизии) телекомплексов
и ЦППС на базе микроЭВМ
Полная проверка выполняется в соответствии с графиком по разрешенной заявке. Отключение аппаратуры производится по разрешению дежурного диспетчера.
Для устройств, показания которых ретранслируются на другие пункты управления, необходимо предварительно принять соответствующие меры, исключающие неправильную передачу телеинформации на другой диспетчерский пункт (переключение цепей, ввод ручных уставок и т.п.).
Рабочие места на энергообъектах подготавливаются производителем работ в соответствии с требованиями "Правил техники безопасности при эксплуатации электроустановок". При работе на датчиках ТИ, связанных с цепями измерительных трансформаторов тока и напряжения, необходимо соблюдать особую осторожность, не допуская разрыва токовых цепей и замыкания в цепях напряжения. Рабочие места заблаговременно обеспечиваются приборами, инструментами и документацией.
Сопротивление изоляции монтажа устройств относительно "земли" измеряются омметром на всех внешних зажимах аппаратуры, за исключением цепей, связанных с сетью питания 220 В и трансформаторами тока и напряжения. Цепи питания проверяются мегаомметром на 500 В и должны иметь сопротивление не ниже 10 МОм.
Систематический контроль за работой телекомплексов предусматривает:
ознакомление с записями в журнале неполадок;
ежедневный внешний осмотр: проверка вызова нескольких кадров с дисплея или ПЭВМ, посылка команды "opros" с консольного дисплея (ТК ГРАНИТ) с контролем по лампочкам блоков ЛУ ответов от КП. При отсутствии ответа от КП необходимо выяснить причину (канал связи, электропитание на объекте, исправность аппарата КП, узла ЛУ в аппарате ПУ и т.д.);
оценку основной погрешности параметров телеизмерения;
бесперебойность приема информации ТС, ЦБИ, ТИИ, ТИТ.
Частичная проверка проводится согласно графику по разрешению дежурного диспетчера.
В объем частичной проверки входят:
внешний осмотр и чистка аппаратуры от пыли;
измерение осциллографом формы и амплитуды сигнала на входе линейных узлов;
определение погрешности показаний ТИ в трех, четырех точках шкалы.
При этом допускается определять погрешность по щитовым приборам на КП;
измерение напряжения на блоках питания;
проверка вентиляторов (при их наличии) и при необходимости их смазка.
Полная проверка проводится в таком же порядке, как и частичная, но включает в себя дополнительные работы для ТК ГРАНИТ: проверку перезагрузки базового программного обеспечения как с ППЗУ, так и с НГМД.
9. Приемка в эксплуатацию телекомплексов и ЦППС на базе микроЭВМ
от наладочных организаций
Ввод СТ в эксплуатацию производится приемочной комиссией, назначенной приказом главного инженера предприятия. Комиссии должна быть предъявлена полностью смонтированная и налаженная аппаратура. До предъявления к сдаче проводится тренировочная эксплуатация СТ, во время которой СТ должна функционировать без вмешательства эксплуатационного персонала. Тренировочная эксплуатация, длительность которой устанавливается не менее чем 72 ч, должна определить качество работы аппаратуры в нормальных эксплуатационных условиях.
Системы телеуправления и телесигнализации желательно во время тренировочной эксплуатации включать на "сигнал". Это обеспечивает возможность регулярных проверок достоверности и надежности работы СТ путем передачи с ПУ периодических запросов и команд. Результаты тренировочной эксплуатации СТ оформляются протоколами и предъявляются приемочной комиссии.
На основании анализа протоколов контрольных испытаний и измерений, а также материалов тренировочной эксплуатации выносится решение о вводе СТ в эксплуатацию или о необходимости дополнительных наладочных работ и повторной сдаче СТ приемочной комиссии.
Приемочной комиссией должны быть проверены следующие функции СТ:
ввод телесигналов от двухпозиционных датчиков;
ввод ТИТ от первичных датчиков;
ввод сигналов ТИИ от датчиков число-импульсных сигналов;
вывод команд ТУ на исполнительные механизмы;
сопряжение с каналами связи, модемами;
передача информации ТС, ТИТ, ТИИ;
ретрансляция информации, принятой от другого КП или ПУ;
сопряжение с ПЭВМ и возможность ввода в КП или ПУ допустимых значений, возможность диагностики неисправности функциональных элементов и узлов;
отображение телекомплексом или ЦППС состояния ТС, ТИТ, ТИИ, ЦБИ.
10. Профилактическое обслуживание устройств телемеханики
Разъемы
Печатные платы с размещенными на них элементами электроники соединяются с устройством посредством многоконтактных (обычно 72 контактных) разъемов. Разъем состоит из колодки, устанавливаемой на блок-каркасе устройства, и вставки, устанавливаемой на печатной плате модуля (субблока).
В большинстве отечественных современных устройств в качестве вставки используется сама печатная плата, а в качестве контактов - площадки фольги, внесенные в рисунок печатной платы. Такое решение позволяет удешевить и уменьшить массу устройства, но предъявляет повышенные требования к качеству материала платы (способности противостоять короблению) и сокращает допустимое количество операций с разъемом (из-за меньшей механической прочности фольгированных контактных площадок платы).
Лучшие результаты при эксплуатации показали колодки, в которых в качестве контактных элементов используются пакеты проволочных пружин (такие контакты обеспечивают несколько точек касания). Хуже обстоит дело с колодками, где в качестве контактного элемента используется единственная плоская пружина, так как такие контакты имеют мало точек касания (от 1 до 2). Известны устройства, в которых такие разъемы используются только в режиме отладки (когда требуются многократные коммутационные операции), а при эксплуатации все контакты разъемов шунтируются специальными лепестками посредством горячей пайки. Вынуть такую плату из каркаса возможно только распаяв все шунты.
В эксплуатационном режиме контактные элементы колодки и печатной платы находятся в соприкосновении и место электрического контакта оказывается защищённым от пыли и в какой-то мере от агрессивной среды. Остальная же часть контактных элементов остается открытой и подвергается загрязнению и окислению (иногда покрывается налетом жира). Электрический контакт в разъеме может сохраняться длительное время до тех пор, пока по какой-либо причине (изменение положения печатной платы после ее извлечения и последующего возвращения на место или после удара) не произойдет смещения его элементов. После смещения новое место механического соприкосновения контактных элементов не может им гарантировать электрический контакт. Оксидные пленки обладают высокой электрической прочностью и напряжения ТТЛ уровня их пробить не могут.
Из вышеизложенного видно, что без особой причины вынимать печатные платы из блок-каркаса не следует, а уж если плата вынута, то перед ее установкой в блок-каркас надо почистить и промыть ей разъем. Жир и грязь смываются с разъемов спиртом (лучше жесткой кисточкой, но можно и чистой и прочной ветошью. При стойких загрязнениях процедуру приходится повторять несколько раз, чтобы размочить отложения. Оксидные пленки спиртом не растворяются и для их удаления можно использовать стирательную резинку (ластик) для карандаша. Ластик для чернил обладает большей абразивностью (содержит слюду), дает больше отходов и может содержать серу, которая является сильным окислителем и вредит контактам.
Во всех случаях после механической чистки контактов их следует тщательно промыть (меняя ветошь) обильным количеством спирта, чтобы не занести оставшиеся после чистки отходы в колодку разъема, так как оттуда их удалять значительно труднее. Не следует приступать к профилактическому обслуживанию устройств телемеханики, не располагая достаточным количеством спирта. При дефиците спирта отложения не смываются, а растворяются и после высыхания растворителя (спирта) дают прочные пленки (подобно спиртовым лакам).
Как временную меру (и только на время обнаружения неисправности) можно рекомендовать установку плат без чистки разъемов с операцией "притирания", т.е. после установки платы в блок-каркас ее несколько раз перемещают в разъеме (притирают) для разрушения изолирующей пленки и установления электрического контакта.
Резервные платы из ЗИП нуждаются в особой обработке перед их установкой в устройство. На заводе разъемную часть печатного рисунка резервных плат заклеивают проводящей пленкой для защиты от механических и электрических повреждений. При расконсервации необходимо с особой тщательностью очистить от старого клея разъемы печатной платы, чтобы его остатки не попали в колодку разъема.
Имеющиеся на плате коммутационные элементы (например, навиваемые при конфигурировании перемычки) рекомендуется пропаять. Иногда вместо перемычек на плату устанавливаются микропереключатели. Следует помнить, что при установке плат в блок (крейт) микропереключатели могут задевать элементы соседней платы и изменять свое состояние. Кроме того, в процессе эксплуатации в микропереключателях (в которых отсутствует золочение) может нарушится электрический контакт. При выявлении неисправного микропереключателя его лучше заменить проволочными перемычками посредством горячей пайки.
Модули ввода аналоговых сигналов
Проверку работы АЦП можно производить традиционно, т.е. последовательно задавая на их входах значения напряжений (токов), сверяя полученные цифровые результаты с расчетными. В современных программируемых устройствах процедуру проверки лучше выполнять с помощью функционального генератора.
Функциональный генератор эмулируют с помощью специальной тестовой программы, связанной через программу драйвера с цифро-аналоговым преобразователем (ЦАП). При отсутствии тестовой программы ее необходимо разработать. Конечным продуктом функционального генератора является меняющееся по определенному закону напряжение (ток) на выходе ЦАП. Выходное напряжение может выражать различные функциональные зависимости (это определяется заданием тестовой программы): синусоида, пилообразное напряжение, меандр, колоколообразное напряжение и др.
По первому методу проверки напряжение с выхода функционального генератора подают на вход испытываемого АЦП. Результаты измерений регистрируются и сравниваются со значениями функции тестовой программы. Поскольку известен закон построения функции и ее текущие значения, то известен предполагаемый результат обратного аналого-цифрового преобразования. При исправном АЦП результаты должны совпадать полностью или различаться не более чем на один квант. При наличии минимального резерва в устройстве каналов ЦАП и АЦП такую проверку работоспособности модулей (автотестирование) можно иметь постоянно (а не только на время профилактических работ). Чтобы уменьшить погрешность квантования, при проверке желательно использовать все имеющиеся разряды ЦАП (а не только необходимые восемь).
Преимущество данного метода состоит в том, что проверка осуществляется не по отдельным нескольким точкам характеристики преобразователя, а непрерывно по всем точкам и процесс проверки автоматизирован.
Недостатком метода является включение в испытательную схему погрешности ЦАП (хотя она, как правило, значительно меньше погрешности АЦП).
При другом способе проверки сигнал с выхода функционального генератора подается одновременно на испытываемый АЦП и на образцовый. Тестовая программа сравнивает результаты измерений обоих преобразователей и сообщает о превышении допустимых расхождений.
При этом методе точность отработки функциональной зависимости на выходе функционального генератора (форма кривой напряжения или тока на выходе ЦАП) не имеет существенного значения.
Модули вывода аналоговых сигналов
Как отмечалось, при проверке работы АЦП первым способом, в схему тестирования входил не только исследуемый АЦП, но и образцовый ЦАП. Данная схема обладает свойством обратимости (для нее важно определить, какой из модулей является образцовым, а какой исследуемым).
Универсальность схемы позволяет применить ее и для проверки работы ЦАП. Для этого необходимо выходной сигнал испытываемого ЦАП передать на вход образцового АЦП и, задавая цифровую последовательность значений на цифровых входах ЦАП, контролировать результат преобразования на выходах кода образцового АЦП. По полученным результатам определяют работоспособность ЦАП. Все процедуры выполняет тестовая программа в автоматическом режиме.
Как и при любой поверке, класс точности образцового прибора должен быть выше класса точности испытываемого прибора, поэтому отсчет результатов образцового АЦП ведется со всех его разрядов (их обычно 10 - 12), а не с восьми (на которых нормально работает исследуемый ЦАП).
Организация "сквозной" проверки одного из измерительных каналов (без разделения модулей на испытываемый и образцовый) при достаточно точном совпадении кодов на входе и выходе модулей ЦАП-АЦП позволяет (косвенно) судить о работоспособности остальных каналов данных модулей. При наличии резерва измерительных каналов такой прием расширяет объем автотестирования устройства.
Модули ввода - вывода дискретных сигналов
При проверке работоспособности модулей ввода-вывода дискретной информации на все их входы последовательно подают сигналы, имитирующие включенное/отключенное состояние двухпозиционного объекта, и отслеживают их исполнение. Одному из состояний объекта (чаще включенному) соответствует замкнутая цепь, другому - разомкнутая цепь. При таком положении невозможно отличить разомкнутую цепь от оборванной, что может привести к ложной информации или ее потере.
В современных устройствах для дискретной информации, требующей большей надежности, используются не двухуровневые сигналы (замкнут/разомкнут), а сигналы с тремя значениями уровней (замкнут - среднее значение сопротивления - разомкнут). Одному из состояний объекта соответствует замкнутая цепь, другому - среднее значение сопротивления цепи (но не разрыв), разомкнутая цепь свидетельствует о неисправности.
Конечно, это усложняет устройство телемеханики, ведь теперь требуются не двух-, а трехуровневые детекторы сигналов или два двухуровневых детектора на каждый дискретный информационный вход (настроенные на два различных уровня), но при этом повышается достоверность информации.
При проверке трехуровневых дискретных входов имитирующие состояние объектов сигналы должны быть тоже трех уровней.
Аналоговые модули (работа с ними изложена выше) также могут контролировать обрыв измерительной цепи. Датчики для телеизмерений, требующих повышенной надежности, имеют в выходном сигнале постоянную составляющую. Рабочий диапазон этих датчиков - 4÷20 мА, ток менее 4 мА воспринимается как обрыв цепи измерения. Контроль уровней реализуется программно, поэтому никаких изменений в самих модулях не требуется.
11. Общие указания по эксплуатации телекомплексов