РД 153-34.1-35.418-2002
РОССИЙСКОЕ АКЦИОНЕРНОЕ ОБЩЕСТВО ЭНЕРГЕТИКИ И ЭЛЕКТРИФИКАЦИИ «ЕЭС РОССИИ»
ДЕПАРТАМЕНТ НАУЧНО-ТЕХНИЧЕСКОЙ ПОЛИТИКИ И РАЗВИТИЯ
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
ПО НАЛАДКЕ СИСТЕМЫ РЕГУЛИРОВАНИЯ
ПРОЦЕССА ГОРЕНИЯ ГАЗОМАЗУТНЫХ КОТЛОВ
РД 153-34.1-35.418-2002
УДК 621.311
Вводится в действие 2003 03 01
Разработано Открытым акционерным обществом «Фирма по наладке, совершенствованию технологии и эксплуатации электростанций и сетей ОРГРЭС»
Исполнитель Ю.Г. МЕТАЛЬНИКОВ
Согласовано с АООТ ВТИ 25.12.2001 г.
Генеральный директор Г.Г. ОЛЬХОВСКИЙ
Утверждено Департаментом научно-технической политики и развития РАО «ЕЭС России» 31.01.2002 г.
Первый заместитель начальника А.П. ЛИВИНСКИЙ
Введено впервые
Срок первой проверки настоящего РД - 2008 г.,
периодичность проверки - один раз в 5 лет.
Введение
Выпущенные в 1978 и 1986 гг. Методические указания по наладке автоматических регуляторов [1, 2] регламентировали состав и содержание работ по наладке автоматических систем регулирования (АСР) теплоэнергетических установок, реализованных на базе аналоговой аппаратуры РПИБ, Каскад и АКЭСР. На сегодняшний день промышленностью освоен выпуск новых типов цифровых регуляторов, которые в большей степени отвечают возросшим требованиям технологии.
Настоящие Методические указания содержат схемные рекомендации по построению АСР процесса горения газомазутных котлов и их реализацию на современных микропроцессорных средствах автоматического регулирования аппаратуры Протар, применяемых на отечественных тепловых электростанциях. Описаны основные этапы выполнения наладочных работ, начиная с обследования объекта и заканчивая корректировкой параметров настройки на действующем оборудовании и испытанием регуляторов. Даны указания по расчету статической и динамической настройки регуляторов с использованием экспериментальных характеристик объектов регулирования, рассмотрен пример расчета и реализации полученных значений параметров настройки на аппаратуре Протар.
Методические указания предназначены для персонала специализированных наладочных организаций и эксплуатационного персонала тепловых электростанций, а также могут оказаться полезными для проектных институтов, занимающихся разработкой АСР на новых и модернизируемых ТЭС.
1 ОБЩАЯ ЧАСТЬ
Вопрос автоматического регулирования процесса горения газомазутных котлов, сжигающих два вида топлива, является одним из наиболее сложных вопросов в деле автоматизации котельного оборудования тепловых электростанций. Несмотря на существующее многообразие и видимую простоту схемных решений в этой области, говорить о повсеместном использовании регуляторов при сжигании газа или мазута в котельных установках электростанций было бы неправильно. Нередко по различным причинам (в том числе технологического характера), при недостаточной квалификации эксплуатационного персонала или слабой его заинтересованности в работе автоматики регуляторы процесса горения вообще выводятся из работы.
Например, регулятор топлива, если его рассматривать изолированно, без связи с общей системой автоматического управления нагрузкой энергоблока, представляет из себя не более чем стабилизатор расхода или давления топлива. Потребность в поддержании этих параметров на заданном значении, конечно, существует, однако и при отключенном регуляторе они могут быть мало подвержены колебаниям, если энергоблок работает в базовом режиме. При плановом изменении нагрузки оператору безразлично, на что воздействовать — на задатчик регулятора топлива или непосредственно на исполнительный механизм регулирующего органа. Таким образом потребность в использовании регулятора топлива, на первый взгляд, может показаться недостаточно очевидной.
В связанной системе автоматического регулирования энергоблока регулятор топлива является инструментом для поддержания давления пара перед турбиной или электрической мощности генератора. И с этих позиций его значение трудно переоценить. Вопросы автоматического регулирования процесса горения котлов ТЭС всегда рассматривались в контексте решения более общей задачи — регулирования нагрузки, а в конечном счете — электрической мощности энергоблоков и частоты сети. В этом смысле, автоматизация основных технологических процессов, связанных с сжиганием топлива, имеет важное эксплуатационное значение.
Помимо регулятора топлива в автоматизации процесса горения участвуют также регуляторы газовоздушного режима. Схемы этих регуляторов отработаны достаточно хорошо, имеют устоявшуюся структуру и успешно эксплуатируются на многих электростанциях. Однако, говоря о совместном сжигании двух видов топлива, необходимо иметь ввиду, что экономичность этого процесса может быть достигнута только за счет раздельного регулирования воздушных потоков пропорционально количеству газа и мазута, сжигаемых в котле. К сожалению на большинстве котлов существует только один вид регулирующего органа, определяющего количество воздуха, подаваемого в топку — направляющий аппарат дутьевого вентилятора. На таких котлах при совместном сжигании поддерживают избыток воздуха, соответствующий режиму сжигания чистого газа.
На некоторых котлах в технологической схеме воздушного тракта предусмотрено распределение воздуха по ярусам горелок. В воздуховодах, идущих к верхнему и нижнему ярусам, установлены регулирующие шиберы и расходомерные устройства. В этом случае при работе котла на смеси в каждом ярусе горелок сжигается только один вид топлива: как правило, в верхнем — мазут, в нижнем — газ. И кроме регулятора общего воздуха, работающего по соотношению «суммарное топливо — суммарный воздух по ярусам», используются два регулятора, распределяющие воздух к «своему» ярусу. Эти регуляторы также являются регуляторами соотношения, но только «своего» воздуха и «своего» топлива на данный ярус горелок.
Однако при регулировании подачи воздуха в котел возникает проблема, связанная с наличием пульсаций в воздушном тракте. Эти пульсации носят высокочастотный характер, но на котлах, оборудованных регенеративными воздухоподогревателями (РВП), к ним добавляется низкочастотная составляющая, вызванная работой РВП и определяемая частотой его вращения (как правило, 2-3 об/мин). Амплитуда пульсаций может достигать больших значений, что при наладке регуляторов воздушного режима, особенно на котлах, работающих с малыми избытками воздуха, вызывает дополнительные сложности. Иногда для обеспечения заданного режима горения с привлечением средств автоматизации приходится изменять типовую структуру регулятора воздуха.
Проблемы наладки системы автоматического регулирования процесса горения тесно связаны с режимными факторами и особенностями самого процесса, но возросшие требования к эксплуатации котельного оборудования (совместно — раздельное сжигание газа и мазута, переход на малые избытки воздуха, усложнение режимов работы и конструкции агрегатов и технологических схем) диктуют необходимость применения современных технических решений по автоматизации структуры систем управления тепловыми процессами и их аппаратурной реализации.
В настоящее время проектируемые системы регулирования процесса горения не всегда отвечают указанным выше требованиям. Несмотря на довольно широкое применение на электростанциях цифровых технических средств регулирования, соответствующие методики для наладки сложных систем, построенных на микропроцессорной технике, пока еще недостаточно распространены.
Поэтому, говоря о наладке системы регулирования процесса горения, необходимо выделить и отдельно рассмотреть три основных вопроса: схемное построение системы, обобщающее наиболее часто встречаемые на практике структурные решения по регуляторам горения, основные проблемы при наладке регуляторов и способы их решения, а также метод расчета системы, обеспечивающий качественное выполнение работ по вводу регуляторов в эксплуатацию.
2 СХЕМНЫЕ РЕШЕНИЯ ПО СИСТЕМАМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПРОЦЕССА ГОРЕНИЯ
На рисунках 1-3 и 5 приведены схемы, которые в значительной степени обобщают существующие на электростанциях структуры автоматических систем регулирования процесса горения. Структурная схема регулирования расхода (давления) газа и мазута к котлу (см. рисунок 1) состоит из двух регуляторов (газа и мазута) с общим заданием от интегратора регулятора мощности. На входы регуляторов посредством специального переключателя могут подсоединяться как сигналы расхода топлива, так и их давлений. Оба сигнала предварительно преобразованы в соответствии со своей статической зависимостью от нагрузки котла. При раздельном сжигании регулируются расходы топлива. Измерение расхода газа GГ на некоторых станциях выполняется с учетом коррекции по давлению перед измерительным устройством по формуле
, (1)
где Δр — перепад давлений газа на измерительном устройстве;
р — текущее давление;
рр — расчетное (абсолютное) давление (равное 1 кгс/см2).
При использовании датчиков, измеряющих абсолютное давление (например, датчики типа «Сапфир»), формула (1) принимает вид
, (2)
При работе на смеси регулируется давление. Сочетание горелок, сжигающих газ и мазут, в этом случае может быть любым, а их тепловая производительность автоматически поддерживается на одинаковом значении. Фиксация одного из видов топлива (в случае необходимости) при изменении нагрузки может быть достигнута за счет перераспределения количественного состава горелочных устройств, в которых сжигаются газ и мазут. Некоторым недостатком схемы в режиме совместного сжигания является отсутствие в ее составе сигналов по расходам топлива, что при отключении горелки (например, на продувку или при переводе котла на сжигание одного вида топлива) вызывает кратковременные колебания нагрузки блока.
В структурной схеме регулирования расхода общего воздуха (РОВ) к котлу (см. рисунок 2) задающим сигналом является или расход газа, или расход мазута. Использование суммарного сигнала по этим видам топлива для обеспечения работоспособности регулятора в режиме совместного сжигания не всегда представляется возможным ввиду низкой надежности измерения малых расходов. Регулируемым параметром является расход или давление воздуха. Иногда из-за отсутствия на воздуховодах котлов расходомерных устройств в качестве сигнала обратной связи применяется импульс по перепаду давлений на РВП. Для придания регулятору общего воздуха большего быстродействия в режимах изменения нагрузки на его вход может также поступать динамически преобразованный сигнал по расходу топлива (на рисунке 2 не показан). Управление исполнительными механизмами направляющих аппаратов двух дутьевых вентиляторов на крупных котлах производится по схеме последовательной (см. рисунок 2) или параллельной (см. рисунок 4) синхронизации. Схема синхронизации предусматривает возможность автоматического управления как двумя, так и одним (любым) направляющим аппаратом в том случае, если автоматическое воздействие на другой в данный момент невозможно.
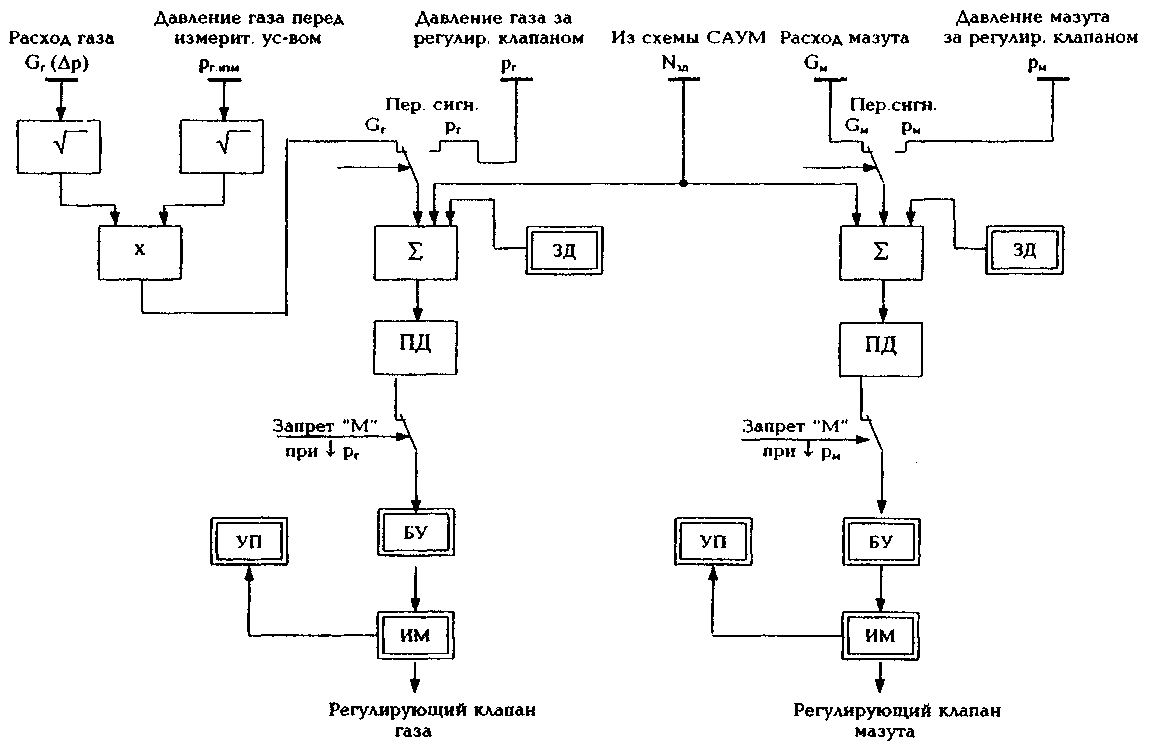
Рисунок 1 — Структурная схема регулирования расхода (давления) газа и мазута к котлу
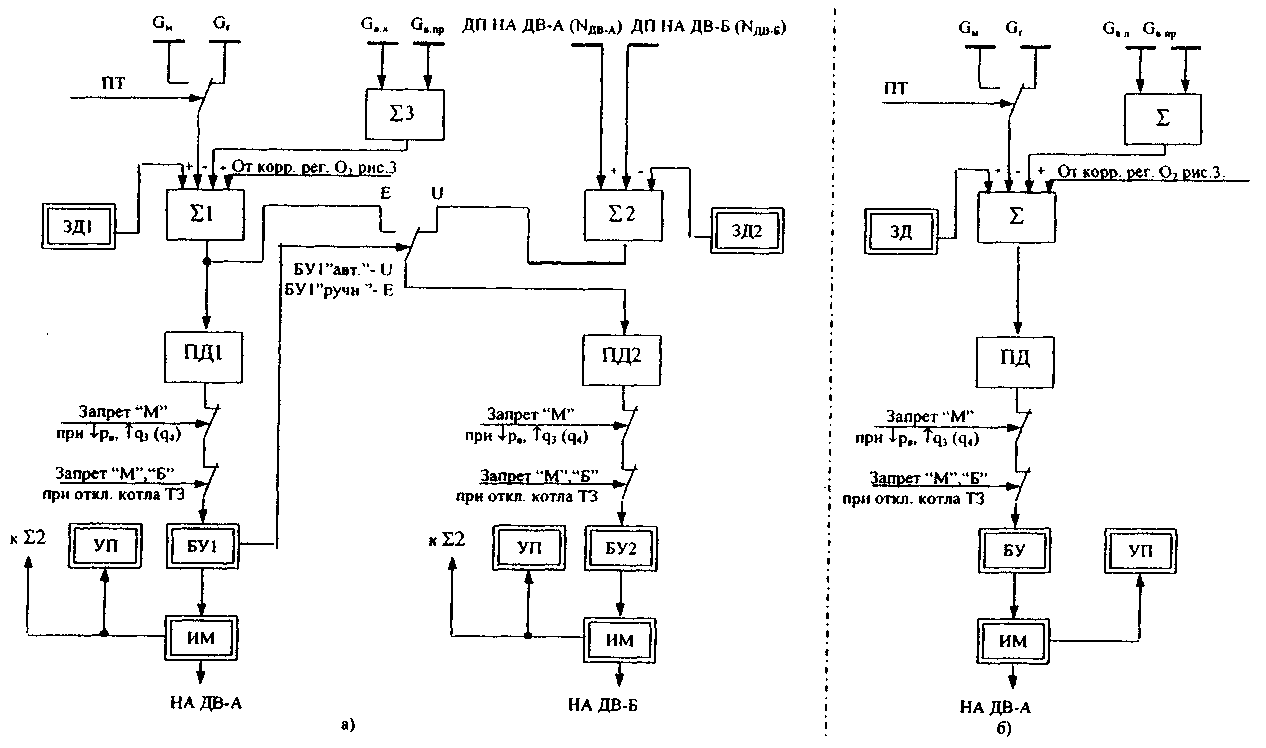
Рисунок 2 — Структурная схема регулирования расхода общего воздуха к котлу (РОВ);
а — для котлов моноблоков; б — для котлов (корпуса) дубль-блоков
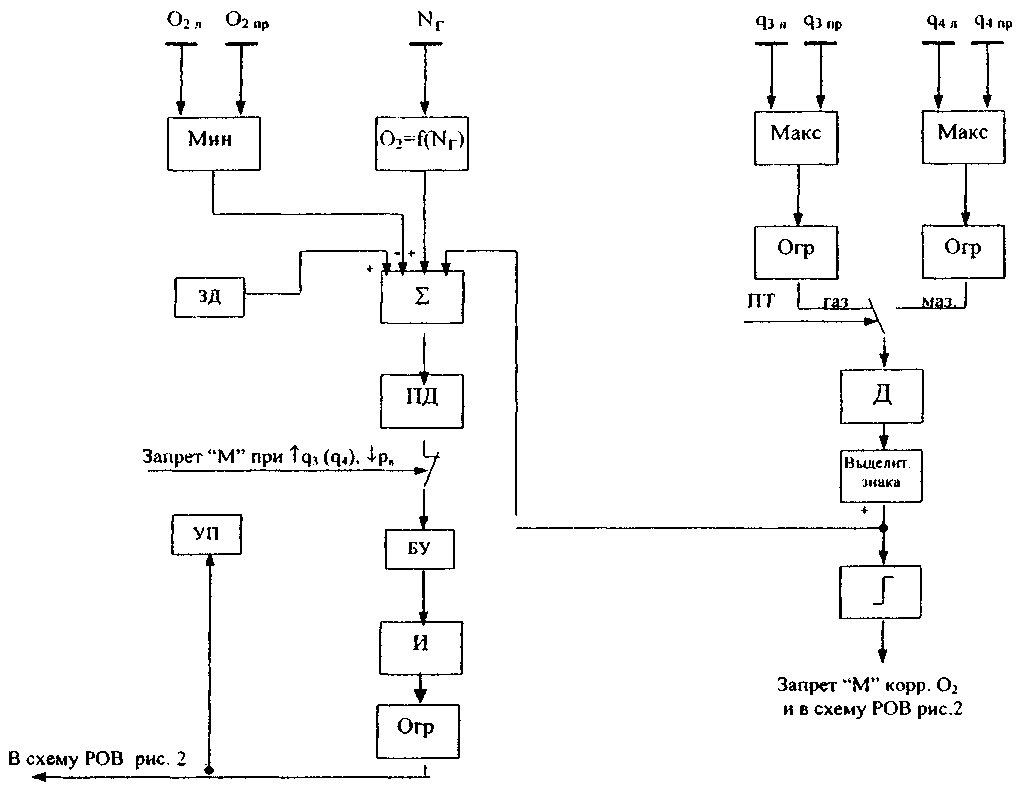
Рисунок 3 — Структурная схема корректора расхода общего воздуха по содержанию кислорода в дымовых газах
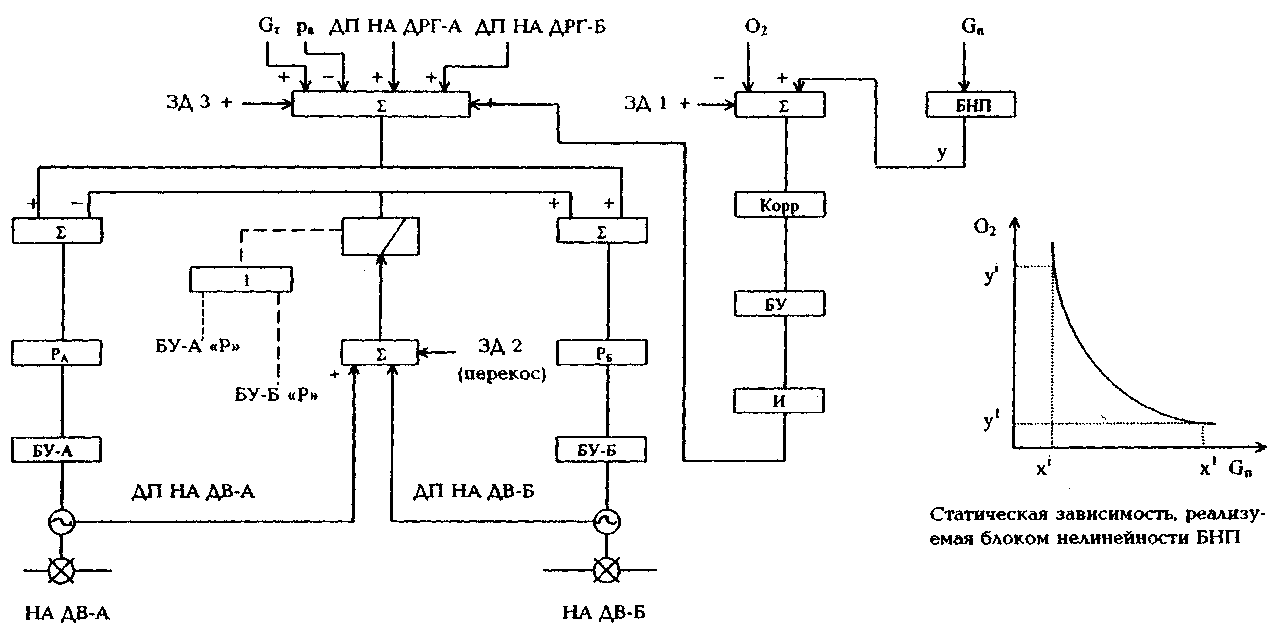
Рисунок 4 — Структурная схема системы регулирования расхода подачи воздуха
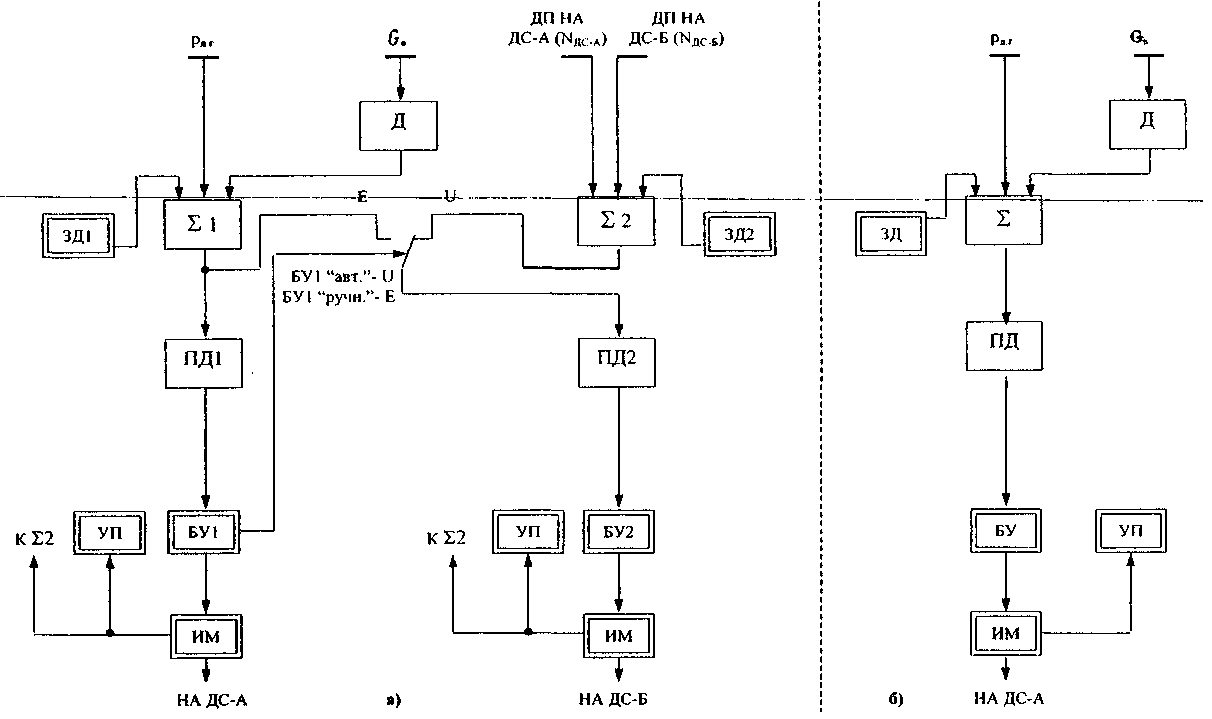
Рисунок 5 — Структурная схема регулирования разрежения в топке котла:
а — для котлов моноблоков; б — для котлов (корпуса) дубль-блока
Для формирования статической зависимости на входе корректирующего регулятора по кислороду (см. рисунок 3) используется один из нескольких существующих сигналов, наиболее полно характеризующих нагрузку котла или энергоблока: электрическая мощность генератора, расход топлива или пара. В схеме корректора предусматриваются сигналы, определяющие химическую неполноту сгорания (появление СО) — q3 при сжигании газа и механическую неполноту сгорания (задымленность) — q4 при сжигании мазута. Появление этих сигналов в динамических режимах работы котла (при изменении нагрузки) вызывает кратковременное увеличение расхода воздуха с одновременным запретом на работу регулятора в сторону прикрытия направляющих аппаратов. Использование указанных сигналов в статическом режиме для корректировки соотношения «топливо — воздух» на сегодняшний день пока невозможно в силу неполной однозначной зависимости показаний приборов на q3 и q4 от значения химической или механической неполноты сгорания.
Регулятор разрежения (см. рисунок 5) стабилизирует давление дымовых газов в верхней части топки котла. Для ускорения отработки регулятором внешних возмущений на его вход может поступать динамически преобразованный сигнал по расходу воздуха в котел.
Автоматизация процесса подачи воздуха в котел с использованием импульса по расходу воздуха от труб Вентури является наиболее оптимальным решением. Такие устройства позволяют получить минимальные значения безвозвратной потери напора, что весьма важно при измерении больших расходов, каковыми являются расходы воздуха, подаваемые к горелкам котла. Кроме того, сигнал по расходу обеспечивает работоспособность регулятора при отключении или включении части горелочных устройств на котлах, где эти операции предусмотрены режимными факторами.
На некоторых котлах конструкцией воздуховодов не предусматривается установка труб Вентури или они установлены таким образом, что исключается возможность получения достоверного сигнала по расходу воздуха из-за отсутствия достаточных по длине прямолинейных участков до и после расходомерного устройства (примерно 5 диаметров воздуховода). В этом случае за регулируемый параметр принимается давление воздуха в перемычке (общем коробе) за РВП. Статическая характеристика давления от нагрузки не является линейной и для ее преобразования к линейному виду в схему регулятора должен быть введен элемент извлечения квадратного корня. Однако кривизна статической характеристики существенна лишь при малых нагрузках, когда режимная автоматика, как правило, не работает, а в регулируемом диапазоне изменения расхода воздуха (например, 50-100% номинальной) с допустимой для практики точностью может быть принята за линейную. Опыт наладки регуляторов общего воздуха с импульсом по давлению позволяет сделать вывод о том, что подобные схемы могут обеспечить высокую точность в поддержании требуемых избытков воздуха.
Однако при использовании сигнала по давлению воздуха необходимо учитывать особенности конструкции некоторых котлов, а именно: врезка напорных линий от дымососов рециркуляции дымовых газов (ДРГ) зачастую производится не в топку котла, а в подводящие воздуховоды на участке от общего короба до горелок. Изменение степени рециркуляции ДРГ, например, в сторону увеличения, приводит к повышению давления в подводящих воздуховодах и перемычке и, как следствие этого, к частичной разгрузке дутьевых вентиляторов (ДВ). Снижение расхода воздуха при этом будет происходить не только за счет дополнительной присадки газов рециркуляции, но и за счет ложной работы регулятора воздуха, который, почувствовав повышение давления в перемычке, прикроет направляющие аппараты ДВ.
Для нейтрализации нежелательного эффекта в работе регулятора, связанного с изменением загрузки ДРГ, в схему регулятора следует завести сигнал по сумме положений направляющих аппаратов ДРГ. Действие этого сигнала должно быть направлено таким образом, чтобы, с одной стороны, компенсировать изменение давления воздуха, связанное с изменением степени рециркуляции ДРГ, а с другой стороны, вызвать срабатывание регулятора в направлении загрузки или разгрузки ДВ на величину, определяемую соответственно повышению или понижением давления воздуха в перемычке при перемещении направляющих аппаратов ДРГ.
На основании экспериментальных переходных характеристик [9] по методике, изложенной в разделе 4 и приложении Б, определяется коэффициент усиления по вновь появившемуся каналу в схеме регулятора общего воздуха — положение направляющих аппаратов ДРГ. В [9] приведены результаты испытаний регулятора общего воздуха (без корректирующего регулятора по кислороду) на нагрузке 170 МВт (энергоблок Т-250) при возмущении направляющими аппаратами ДРГ. Полученные данные свидетельствуют, что регулятор общего воздуха, являясь регулятором давления, обеспечивает стабильное поддержание расхода воздуха на данной нагрузке (на это указывает постоянство значений содержания кислорода в процессе испытаний) при внешнем возмущении направляющими аппаратами ДРГ, приводящем к изменению основного регулируемого параметра.
На рисунке 4 показана структурная схема системы регулирования подачи воздуха в котел. От традиционной она отличается наличием сигнала по положению направляющих аппаратов ДРГ и более современной версией схемы синхронизации (известная и ранее параллельная синхронизация двух исполнительных механизмов с использованием двух ПД-преобразователей). При переводе в ручной режим управления направляющего аппарата любого ДВ схема синхронизации отключается от входов ПД-преобразователей и регулирование осуществляется одним оставшимся в работе направляющим аппаратом.
В практике наладки и эксплуатации систем автоматического регулирования процесса горения, а также в специальной литературе утвердилось мнение, что для котлов, сжигающих жидкое топливо и работающих в широком диапазоне изменения нагрузок, когда возникает необходимость отключения части работающих горелок, метод измерения расхода воздуха по давлению является неприемлемым. Однако, как уже упоминалось, измерение давления воздуха в некоторых случаях оказывается единственной возможностью для организации автоматического регулирования подачи воздуха в котел.
Следует отметить, что отключение отдельных горелок при снижении нагрузки является необходимым условием работоспособности оборудования не только для котлов, сжигающих мазут в форсунках без парового распыла. Довольно часто такие операции проводятся и на котлах, оборудованных паромеханическими форсунками, а также при сжигании газа. В этом случае подобный режим нередко проистекает по причине несовершенства, разрегулировки или старения основного оборудования, а порой определенного консерватизма оперативного персонала и стремления сохранить повышенный запас устойчивости по горению (запас по давлению топлива перед горелками) на низкой нагрузке. Эти обстоятельства, однако, весьма серьезны и с ними приходится считаться.
В схеме автоматического регулирования процесса горения таких котлов регулятор общего воздуха может поддерживать давление в перемычке за РВП в соответствии с заданием по давлению сжигаемого топлива. Соотношение этих давлений выбирается из режимной карты и является постоянным для данного типа котла, зависящим только от вида топлива и количества работающих горелок. Статические характеристики давления мазута и давления воздуха при переходе от 6 горелок к 8 (например, котел БКЗ-420) несколько смещаются, однако их крутизна меняется незначительно. Это означает, что зависимость давления воздуха от давления топлива носит примерно одинаковый характер при любом составе горелочных устройств. Следовательно, при включении или отключении горелок регулятор общего воздуха без дополнительной перенастройки установит давление воздуха перед горелками в соответствии с заданием по давлению топлива. При этом, если указанное задание будет соответствовать значению нагрузки котла, то образовавшийся расход воздуха будет также соответствовать нагрузке.
Регулятор топлива выполнен по каскадной схеме. Стабилизирующий контур поддерживает давление топлива за регулирующим клапаном согласно заданию, которое поступает от корректирующего регулятора по кислороду. Корректор поддерживает расход топлива пропорционально заданной нагрузке. Так как отключение — включение горелок является сильным возмущением по топливу для котлов, имеющих небольшое количество горелочных устройств, стабилизация давления в подобных режимах весьма желательна. Особенно это относится к включению горелок, где сопровождающий этот процесс провал давления топлива может усугубиться параллельной работой регулятора расхода.
Таким образом в схеме формируется автоматическое задание регулятору давления топлива, которое определяется нагрузкой котла. При изменении количества работающих горелок для сохранения прежнего расхода топлива (нагрузки) регулятор перемещает клапан в новое положение. При этом перед горелками устанавливается такое давление, которое при новом составе горелочных устройств способно обеспечить первоначальный расход топлива в котел.
В свою очередь регулятор общего воздуха приводит в соответствие давление воздуха с новым установившимся давлением топлива. Этим будет восстановлен существовавший до переключения горелок расход воздуха, а следовательно, и соотношение «топливо — воздух».
3 ОСНОВНЫЕ ЭТАПЫ ПРИ ВЫПОЛНЕНИИ НАЛАДОЧНЫХ РАБОТ
3.1 Наладка АСР процесса горения, как и любых других систем регулирования, начинается с анализа состояния основного технологического оборудования с позиций его соответствия требованиям автоматизации [8]. При современном развитии технических средств регулирования именно неготовность основного оборудования нередко является препятствием для успешного ввода в работу тех или иных систем автоматизации. Применительно к АСР процесса горения необходимо обращать внимание на следующие факторы:
— состояние, тип и характеристики регулирующих органов подачи газа и мазута к котлу;
— исполнительные устройства и их сочленение с направляющими аппаратами дымососов и ДВ;
— способы измерения и состояние расходомерных устройств подачи топлива и воздуха в котел;
— тип горелочных устройств и диапазон их работы;
— пульсации в газовоздушном тракте;
— технологические ограничения при работе оборудования;
— режимные и конструктивные особенности оборудования, способные оказывать влияние на работу регуляторов.
Комплекс вопросов касательно регулирующих клапанов подачи жидкого и газообразного топлива в котел и практикующиеся на сегодняшний день способы их решения будут рассмотрены в разделе 5.
При ревизии исполнительных устройств, воздействующих на направляющие аппараты ДВ и дымососов, проверяется плавность хода (без видимых заеданий) и люфт в сочленениях кривошипа МЭО с рычагом передвижных колец направляющих аппаратов. Незначительные шероховатости и трения в рычажных соединениях обычно преодолеваются усилием исполнительного механизма, мощность которого для данных устройств выбирается, как правило, с запасом (МЭО-4000). Устранить полностью люфт не представляется возможным, Однако при контроле монтажа тех узлов, где присутствие люфта обязательно, но носит прогрессирующий характер, его размер можно изначально уменьшить. Например, за счет обеспечения близких по размеру диаметров шарнирного соединения рычагов и вилки тяги. Желательно (совместно с представителем котельного цеха электростанции) проверить положение направляющих аппаратов при их полном открытии и степень плотности при закрытии. Эти положения должны соответствовать настройке конечных выключателей и механических упоров исполнительных механизмов. Такая работа для ДВ может быть выполнена при останове блока, а для дымососов — во время ремонта.
Для измерения расхода мазута на отечественных электростанциях в основном используются устройства, принцип работы которых основан на измерении перепада давлений на сужающем устройстве (сопло «четверть круга»). Проверка измерительного устройства состоит в визуальном контроле плотности разделительных сосудов и импульсных линий. При наличии подтеканий (со стороны импульсных линий) необходимо снять датчик, а сосуды и импульсные линии продуть паром или промыть горячей водой. Замазученный датчик ремонту не подлежит и заменяется на новый. При отсутствии внешних признаков подтекания мазута (сосуд, импульсные линии и накидная гайка датчика чистые) целесообразно проверить скорость изменения сигнала от дифманометра, используемого в схеме регулирования, при изменениях расхода топлива. Сигнал датчика должен установиться на новом значении практически одновременно с перемещением мазутного клапана. Это будет свидетельствовать о том, что сосуды и импульсные линии плотные и заполнены разделительной жидкостью.
Сосуды и импульсные линии со стороны дроссельного устройства должны быть изолированы и расположены на мазутопроводе или в непосредственной близости от него. Иногда выполняют общую изоляцию сосудов совместно с мазутопроводом. Это улучшает динамику сигнала от датчика, но затрудняет обслуживание разделительных сосудов.
При измерении расхода воздуха посредством труб Вентури главная проблема заключается в обеспечении достоверности показаний в точках отбора импульса при большой площади сечения воздуховодов и неравномерности потока воздуха. Для решения этой проблемы отборы как «плюсового», так и «минусового» импульсов производятся не менее чем в четырех точках по периметру воздуховода. Первичные отборы объединяются посредством усреднительного кольца, к которому подключаются импульсные линии датчика. Подключение необходимо производить в верхней части воздуховода посредством резьбового соединения. Это позволяет, в случае забивания отборных устройств, отсоединить импульсную линию и продуть усреднительное кольцо. При сварном подключении необходимо в месте подсоединения предусмотреть отверстие для продувки с резьбой под заглушку.
При отсутствии на котле устройств измерения расхода воздуха схему регулятора можно реализовать, используя импульс по давлению воздуха за РВП. Обычно задействуют сигнал по давлению в перемычке (общем коробе) после РВП. Этот параметр удобен еще тем, что задается режимной картой котла. Известен способ формирования сигнала по расходу воздуха, которым можно измерять и расход дымовых газов, как отношение мощности ДВ к его напору с последующим нелинейным преобразованием [10]. Способ, разработанный Урал ВТИ, пока не нашел промышленного применения на электростанциях, хотя безусловно заслуживает внимания. Прежде всего тем, что не выдвигает каких-либо технологических требований к основному оборудованию с точки зрения организации измерений. Так, например, при установке труб Вентури трассировка воздуховодов котла должна обеспечивать прямолинейные участки с двух сторон от расходомерного устройства длиной не менее 5 диаметров воздуховода, что не всегда практически выполнимо.
Наличие на котле паромеханических форсунок обычно обеспечивает постоянство состава горелочных устройств при работе котла в широком диапазоне нагрузок. Такие форсунки меньше подвержены забиванию (коксованию), что позволяет поддерживать давление перед котлом в соответствии с режимной картой и тем самым сохранять неизменной статическую настройку регулятора топлива. При автоматизации процесса горения на котле, сжигающие мазут, регулятор топлива может иметь простую структуру и работать как в режиме поддержания давления, так и расхода топлива. Приступая к наладке системы регулирования процесса горения, наладчик относительно свободен в выборе схемных решений.
На котлах, оборудованных форсунками без парового распыла, при работе на мазуте и снижении нагрузки неизбежно отключение отдельных горелок или их группы. В этом случае для сохранения заданной нагрузки в структуре регулятора топлива должен быть предусмотрен сигнал по расходу мазута. Иногда, как указывалось ранее, отключение горелок на низких нагрузках может происходить и при работе котла на газе. Еще раз отметим, что операции по отключению — включению горелок, особенно на котлах малой производительности, являются сильным возмущением для работающей автоматики процесса горения. Поддержание в этом режиме только расхода топлива может оказаться недостаточным и привести к провалу давления (например, при вводе горелки в работу) и, как следствие, к останову котла. Поэтому в подобных переходных режимах наряду с расходом топлива целесообразно стабилизировать и его давление.
Перед наладкой регулятора топлива на котле, сжигающем мазут, необходимо проследить, чтобы клапан рециркуляции мазута в пределах котла был полностью закрыт (на некоторых электростанциях оперативный персонал в нормальных режимах эксплуатации предпочитает держать этот клапан в приоткрытом положении).
Пульсации параметров газовоздушного тракта являются неотъемлемым свойством работы котла. Во избежание частых срабатываний регуляторов разрежения и общего воздуха высокочастотная составляющая этих пульсаций подавляется за счет собственных фильтрующих элементов, входящих в состав серийно выпускаемой аппаратуры регулирования. Низкочастотная составляющая обычно связана с работой РВП и определяется частотой его вращения. При четко выраженных колебаниях (постоянство амплитуды и частоты) разрежения в топке или давления воздуха может быть использован избирательный фильтр, не пропускающий на вход регулятора периодические возмущения заданной частоты. В [7] приводится передаточная функция такого фильтрующего элемента, который может быть реализован на программируемой процессорной технике в канале входного сигнала, подверженного пульсациям. Однако на практике однозначно наблюдать колебательную составляющую параметра, связанную с вращением РВП, не всегда представляется возможным из-за наличия многочисленных побочных влияний. Так, например, значение частоты вращения двух РВП одного котла никогда не бывает абсолютно одинаковым. В результате, колебания параметров, вызванные их работой, могут как складываться и усиливаться, так и взаимно уничтожаться. В последнем случае избирательный фильтр, включенный в измерительную схему регулятора, начинает играть роль мощного демпфирующего элемента, что отрицательно сказывается на работе регулятора.
Введение собственного демпфера, несмотря на широкие возможности современной аппаратуры (максимальная постоянная времени фильтра приборов Протар 9999 сек), снижает чувствительность и быстродействие регулятора. Подавить пульсации, которые носят достаточно хаотичный характер, в некоторых случаях позволяют механические фильтры, устанавливаемые на входе в датчик. Настраивая такой фильтр, необходимо, с одной стороны, ориентироваться на сглаживание пульсаций максимально возможной амплитуды, а с другой — не перейти ту грань, за которой происходит заметное снижение чувствительности датчика в целом.
Приступая к наладке регуляторов процесса горения на действующем котле, необходимо посредством опроса оперативного и ремонтного персонала и изучения имеющейся эксплуатационной документации, а также путем непосредственного визуального контроля познакомиться с режимными особенностями работы оборудования. Прежде всего это относится к способам сжигания топлива (сжигание топлива одного вида, раздельное — двух видов, раздельно-совместное). Исходя из этого выбираются или анализируются существующие схемные решения по системам регулирования процесса горения. Ограничения по топливу, возникающие на электростанциях, связаны, как правило, со сжиганием газа. Это топливо отпускается в определенном количестве, и поскольку эксплуатационный персонал стремится использовать его в первую очередь, то распределение газа по котлам может оказаться произвольным. При этом схема регулирования топлива должна обеспечивать стабилизацию расхода газа на заданном значении при одновременном изменении расхода мазута на том же котле в соответствии с суточным диспетчерским графиком нагрузок. При наличии на котле ограничений по тяге или дутью наладку регуляторов целесообразно перенести на послеремонтный период, когда эти ограничения могут быть устранены.
При подаче газов рециркуляции в топку котла схема регулятора общего воздуха может иметь вид, изображенный на рисунках 2, 3 и 4, но без сигнала по положению направляющих аппаратов ДРГ. При врезке напорных линий ДРГ в подводящие воздуховоды к горелкам, но при наличии измерительных устройств по расходу воздуха, управлять подачей воздуха в котел можно также по схемам рисунков 2 и 3. Если при этом измерение расхода воздуха не производится, то следует перейти к схеме рисунка 4.
3.2 Наряду с обследованием основного оборудования, подлежащего автоматизации, проверяется состояние приборного парка (датчики, пусковые устройства, аппаратура), на базе которого предполагается реализовать систему регулирования. АСР горения может быть выполнена как на аналоговых, так и на микропроцессорных технических средствах. В настоящее время на отечественных электростанциях широкое распространение получили регулирующие приборы Протар Московского завода тепловой автоматики и приборы Ремиконт АО «ЗЭиМ» (г. Чебоксары). Оба типа приборов относятся к категории свободно программируемых технических средств. В приложении А к настоящим Методическим указаниям рассматриваются примеры реализации схем АСР процесса горения на микропроцессорной технике Протар. Там же дано краткое описание этой аппаратуры, приведены функциональные схемы регуляторов (и их расшифровка) и перечислены органы настройки.
При наличии на работающей электростанции микропроцессорной техники проблем при монтаже системы регулирования процесса горения не возникает, так как по сравнению с аналоговой техникой заметно снижается сам объем монтажных работ и отсутствует необходимость в размещении дополнительных щитовых изделий. Монтаж нередко выполняется ремонтным персоналом цеха автоматики и измерений. Из комплекта аналоговых приборов могут быть использованы блоки ручного управления (БУ). Микропроцессорные приборы устанавливаются в существующие панели, схемы индивидуального дистанционного управления направляющими аппаратами и клапанами топлива сохраняются без изменения. В качестве первичных приборов для измерения расхода и давления топлива, расхода (давления) воздуха и разрежения в топке желательно использовать датчики типа «Сапфир», выпускаемые, например, московским заводом «Манометр», работающие надежно и имеющие высокий класс точности. Перед установкой на объект датчики вместе с блоками питания проходят лабораторную проверку в объеме заводской инструкции.
Программирование приборов Протар удобнее производить также в лаборатории. При этом одновременно с набором программы может выполняться ее отладка — обнаружение и устранение возможных ошибок при программировании. Прибор выполнен таким образом, что при наличии ошибки в программе ее дальнейший ввод ограничивается.
3.3 Режимная карта действующего котла является рабочим документом не только для оперативного технологического персонала электростанции. Для наладчиков, занимающихся внедрением системы регулирования процесса горения, это источник получения исходных данных для статической настройки соотношений «топливо — воздух», «нагрузка — кислород» регулятора общего воздуха. Фрагмент режимной карты котла ТГМП-344А, имеющий отношение к автоматике процесса горения, приведен в приложении Б. Там же рассмотрен пример использования соотношений основных параметров, участвующих в горении и взятых из режимной карты, для определения статической настройки регуляторов топлива и воздуха.
При выполнении наладочных работ на новых котлах, для которых режимная карта еще не составлена, исходные данные для статической настройки регуляторов определяются на основании текущего эксплуатационного режима и в дальнейшем уточняются.
Информация о расходных характеристиках регулирующих клапанов на газе и мазуте может быть получена в ходе нормальной работы котла. Для этого в регулировочном диапазоне нагрузок (например, 50-100% номинальной) снимается в нескольких точках зависимость «положение клапана — расход топлива». Единственное условие — постоянство давления топлива перед клапаном и неизменное количество горелочных устройств. В некоторых случаях для принятия решения о пригодности клапана к работе в схеме автоматического регулирования подачи топлива снятие его расходных характеристик не является обязательным. Так, например, если номинальная производительность котла достигается при 30-40% полного хода мазутного клапана при времени сервомотора 30 с, то с позиций автоматизации клапан нуждается в реконструкции.
Для расчета динамических настроек регуляторов процесса горения необходимо снять следующие кривые разгона (испытания по снятию кривых разгона проводятся по специальной программе, утвержденной главным инженером электростанции):
— расход (давление) топлива при возмущении регулирующим клапаном подачи топлива;
— расход (давление) воздуха при синхронном возмущении направляющими аппаратами ДВ;
— содержание кислорода в уходящих газах при возмущении расходом (давлением) воздуха;
— разрежение в топке при синхронном возмущении направляющими аппаратами дымососов.
Снятие динамических характеристик с необходимой для последующего расчета точностью по таким малоинерционным и подверженным пульсациям параметрам, как расход (давление) воздуха и разрежение в топке, представляет немалую трудность. Поэтому в отдельных случаях определение динамических настроек для таких регуляторов (сюда можно добавить и регулятор расхода — давления топлива) допускается производить опытным путем.
3.4 Определение расчетным путем на основании полученных исходных данных статических и динамических параметров настройки регуляторов — один из этапов выполнения наладочных работ. Задача настройки в целом (включая корректировку расчетных значений на действующем оборудовании) состоит в том, чтобы в заданной системе регулирования выбрать и установить настроечные параметры регулятора, обеспечивающие близкий к оптимальному процесс регулирования [6]. Основным требованием, которому должен удовлетворять оптимальный процесс регулирования, является интенсивность затухания переходного режима.
Степенью затухания (колебательности) Ψ называется отношение разности двух соседних положительных амплитуд (А1 и А3) на графике переходного процесса регулирования к первой из соседних амплитуд:
. (3)
Очевидно, степень затухания Ψ равна нулю в том случае, если третья амплитуда равна первой, т.е. когда процесс незатухающий.
Степень затухания Ψ равна единице в том случае, если третья амплитуда равна нулю, что соответствует апериодической форме переходного процесса.
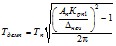
Получение оптимального процесса регулирования (Ψ в пределах 0,75-0,9) достигается, в основном, за счет правильного выбора динамических параметров настройки регулятора. Существует несколько методов расчета оптимальной настройки систем регулирования [4-6]. В практике выполнения наладочных работ чаще всего используют, так называемые, инженерные методы расчета, основанные на использовании номограмм или формул, которые были получены в результате модельного исследования и обобщения работы АСР различных объектов. На рисунке 9 приведены номограммы для определения параметров динамических настроек ПИ-регулятора в одноконтурной замкнутой АСР на объектах с самовыравниванием, обладающих достаточной (не слишком малой) инерционностью, а также формулы ВТИ для объектов, кривые разгона которых имеют формы, подобные изображенным на рисунке 8, с любыми временными характеристиками.
В задачу настройки системы автоматического регулирования входит также обеспечение требуемых соотношений различных параметров, правильное дозирование которых определяет надежность и экономичность работы технологического оборудования. Выполнение этой задачи может быть достигнуто путем статической настройки регулятора.
Методика и пример расчета системы автоматического регулирования рассмотрены соответственно в разделе 4 и приложении Б.
3.5 После завершения монтажных работ по системе автоматического регулирования процесса горения проверяется ее функциональная готовность к работе. Прежде всего необходимо удостовериться в целостности входных и выходных цепей регулятора. Исправность входных каналов проверяется путем измерения сигнала датчика непосредственно на входе в регулятор и сравнения его с текущим значением технологического параметра. На неработающем котле сигнал по месту установки датчика можно имитировать (необходимость в этом отпадает, если использован датчик с выходным сигналом 4-20 мА).
При отсутствии сигнала на входе в регулятор цепи датчика необходимо прозвонить. Если сигнал приходит в искаженном виде, следует проследить всю входную цепочку, например, на предмет правильности установки защитных стабилитронов в случае размножения сигнала от датчика к другим потребителям.
Фазировка входных каналов осуществляется в соответствии с технологическим алгоритмом работы регулятора путем изменения значения сигнала (коэффициента передачи) по данному каналу и его сравнения со знаком изменения сигнала разбаланса регулирующего прибора.
Исправность управляющих цепей проверяется путем кратковременного автоматического воздействия на исполнительный механизм как в одну, так и в другую сторону. При этом уточняется фазировка управляющего воздействия.
На регуляторах устанавливаются параметры динамической настройки, определенные расчетным путем по номограммам или формулам ВТИ (см. рисунок 9) на основании временных характеристик кривых разгона. Методика определения коэффициентов передачи по каналам регулирующих и задающих воздействий, а также зоны нечувствительности рассматривается в следующем разделе.
После установки на регуляторе расчетных параметров настройки производится его пробное включение. Убедившись, что при неизменной нагрузке и отсутствии искусственно наносимых возмущений работа регулятора не вызывает расходящихся колебаний, можно переходить к испытаниям регулятора.
Перед проведением наладочных испытаний составляется и подписывается у главного инженера электростанции соответствующая программа (на каждый регулятор в отдельности или на группу регуляторов), где указывается:
— цель испытаний;
— условия их проведения (нагрузка котла или энергоблока, количество работающих механизмов и горелок и т.п.);
— тип и количество наносимых возмущений;
— предполагаемая длительность переходного процесса;
— условия завершения испытаний;
— ответственные лица.
В дальнейшем для передачи регуляторов в эксплуатацию составляется еще одна программа по проведению приемо-сдаточных испытаний. Так как содержание этих программ во многом повторяет друг друга (разница в том, что в первом случае она отражает интересы исполнителя, во втором — заказчика), то, по согласованию с руководством цеха ТАИ, они могут быть совмещены.
При проведении испытаний возмущения наносятся как ручным задатчиком (при этом уточняется диапазон его действия), так и регулирующим органом. Следует отметить, что у регулятора топлива имеется дополнительный, автоматический задатчик, каковым является интегратор регулятора мощности (Nзд на рисунке 1). Поскольку этот задатчик представляет из себя основное средство воздействия на регулятор топлива после включения последнего в работу, то при проведении испытаний диапазон его действия и цена деления в обязательном порядке должны быть установлены и выданы оператору котла (блока).
Общий подход к корректировке параметров динамической настройки относительно расчетных значений может быть следующим:
— в каждом опыте меняется только один из двух параметров настройки (коэффициент передачи регулятора или время интегрирования);
— если переходный процесс характеризуется слабой колебательностью (или отсутствием таковой), но большой длительностью, то коэффициент передачи регулятора следует увеличивать, а время интегрирования уменьшать;
— если переходный процесс носит сильно выраженный колебательный характер при нормальной крутизне характеристики регулирующего органа, то коэффициент передачи регулятора должен быть уменьшен;
— если переходный процесс имеет слабую колебательность (3-4 разнополярных колебания регулируемого параметра относительно равновесного состояния) и малую длительность, то он близок к оптимальному.
Если снять кривые разгона для объектов регулирования процесса горения по каким-либо причинам не представляется возможным, то определение параметров динамической настройки регуляторов, как указывалось ранее, может быть выполнено экспериментально. При этом для первых пробных включений регулятора на нем устанавливаются настройки, заведомо исключающие появление колебательного или, по крайней мере, расходящегося переходного процесса (заниженный коэффициент передачи регулятора и повышенное время интегрирования). Дальнейшие операции по корректировке настроек производятся согласно рекомендациям, изложенным выше.
После настройки быстродействующих контуров регулирования подачи топлива, воздуха и разрежения в топке, регуляторы остаются в работе и уточняется расчетное значение статической настройки соотношения «топливо — воздух». Динамические и статические настройки корректирующего регулятора по кислороду определяются на основании кривых разгона и режимной карты котла. При проведении динамических испытаний корректирующего регулятора возмущение целесообразно наносить ручным задатчиком, причем во избежание появления химической или механической неполноты сгорания сначала в большую сторону, затем — в меньшую. Статическая настройка проверяется и при необходимости уточняется в режиме изменения нагрузки котла при поддержании подчиненным регулятором ранее настроенного соотношения «топливо — воздух» (см. раздел 5).
3.6 Последовательность настройки и ввода в работу регуляторов процесса горения может быть произвольной. С точки зрения поэтапной завершенности работ наладку целесообразно начинать с регулятора разрежения, затем переходить к регулятору топлива и заканчивать работу настройкой регулятора общего воздуха, который является наиболее трудоемким и сложным узлом в силу необходимости предоставления определенных режимов и нагрузок.
Настройка схемы синхронизации двух исполнительных механизмов по варианту рисунка 2 или 5 сводится к настройке быстродействующего регулятора соотношения двух параметров (положение направляющих аппаратов ДВ или дымососов). Коэффициенты передачи как по основному каналу, так и по каналу задающего воздействия устанавливаются одинаковыми и максимальными. В варианте рисунка 4 синхронизация происходит одновременно посредством двух регуляторов. Однако каждый из них отрабатывает сигнал по разности положений направляющих аппаратов и в этом смысле ничем не отличается от регулятора, реализующего схему синхронизации на рисунке 2 или 5.
В целом динамическую настройку регуляторов желательно проводить при нагрузке котла, близкой к нижней границе регулировочного диапазона, так как коэффициенты усиления большинства теплоэнергетических объектов возрастают при снижении нагрузки. В этом случае правильно подобранные настройки будут гарантировать устойчивую работу регуляторов также и на нагрузках более высоких. Для быстродействующих регуляторов указанное условие не столь критично и в большинстве случаев такие регуляторы могут обеспечивать хорошее качество регулирования с неизменными настройками во всем диапазоне рабочих нагрузок котла.
Однако иногда динамические параметры настройки регулятора нуждаются в корректировке. Например, при некоторых значениях коэффициента передачи и времени интегрирования регулятор обеспечивает высокое быстродействие на низкой нагрузке, но при максимальной паропроизводительности котла переходный процесс оказывается излишне затянутым. Если подбором компромиссных значений параметров настройки не удается добиться удовлетворительного качества регулирования на всех нагрузках, прибегают к автоматической перенастройке. На аппаратуре Протар эта операция выполняется программным путем. Для чего может быть использована одна из функций «переключение», посредством которой в исходном состоянии в ячейку C1 (коэффициент пропорциональности) или t1 (постоянная интегрирования) засылаются первоначальные значения параметров настройки, а при срабатывании функции эти значения меняются на новые. И первоначальные, и новые значения настроек размещаются в ячейках П категории «программируемая переменная» и после функционального преобразования пересчитываются с учетом соответствующей размерности. Инициативным сигналом, вызывающим работу функции «переключение», может служить факт достижения параметром, характеризующим нагрузку котла (например, расход топлива) заданного значения.
Для организации «непрерывной» перенастройки (названной так по аналогии с дискретной, рассмотренной выше) используется функция F13 — «кусочно-линейное преобразование», где в качестве входного параметра может быть применен тот же расход топлива, а выход, преобразованный под размерность С1 или t1 постоянно подключен к этим ячейкам.
Соответствующие зависимости для коэффициента передачи и времени интегрирования, обеспечивающие оптимальную работу регулятора на различных нагрузках, предварительно должны быть определены расчетным путем или экспериментально.
Настройка динамических сигналов (динамической связи) по расходу воздуха в схеме регулятора разрежения или по расходу топлива у регулятора соотношения «топливо — воздух» производится после того, как наладочные испытания регуляторов процесса горения закончены и система включена в работу. Так как оптимальные настройки регуляторов определялись из условия устойчивой работы (при заданных показателях) замкнутой системы регулирования при основном возмущении (т.е. поступающем со стороны регулирующего органа), то они не могут быть изменены при настройке канала ввода внешнего возмущения [6]. Другими словами, настройки дифференцированных сигналов по воздуху и топливу не связаны однозначно с настройками собственно контуров регулирования и их выбор предполагает определенную свободу действий для наладчика. Эта формулировка, однако, означает только то, что определение настроечных параметров дифференциатора может производиться экспериментально на работающем оборудовании и не будет влиять на устойчивость основного контура регулирования. При этом необходимо обращать внимание на следующее:
— в динамике (например, при изменении нагрузки котла) действие дифференциатора должно обеспечивать упреждающее воздействие на регулятор с целью заблаговременного изменения положения регулирующего органа в сторону снятия предполагаемого возмущения;
— влияние дифференциатора не должно быть чрезмерным (как по значению, так и по длительности), чтобы под его воздействием регулируемый параметр не изменил своего значения в сторону, противоположную нанесенному возмущению;
— в результате работы дифференциатора динамические отклонения регулируемого параметра в переходных режимах и длительность самого процесса регулирования должны сократиться.
4 МЕТОДИКА РАСЧЕТА СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПРОЦЕССА ГОРЕНИЯ
За основу расчета может быть принята методика [1] с соответствующими изменениями, вызванными переходом от аналоговых к процессорным техническим средствам реализации АСР и параметров ее настройки.
Порядок расчета целесообразно изложить для наиболее сложной составной части системы регулирования процесса горения, каковой является регулятор подачи воздуха в котел. Этот регулятор имеет двухконтурную каскадную структуру и состоит из стабилизирующего и корректирующего регуляторов. В этом случае расчет параметров настройки регуляторов топлива и разрежения можно рассматривать как частный случай расчета общей системы, а именно, ее стабилизирующего контура.
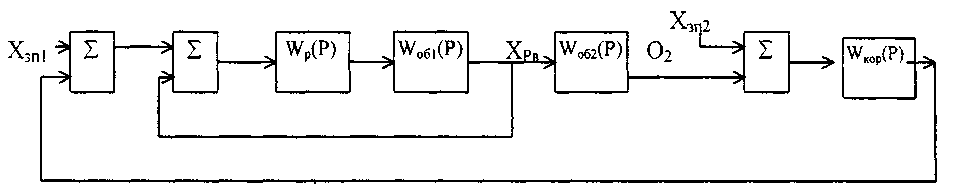
Приведенную на рисунке 4 схему АСР воздуха с использованием корректирующего импульса по кислороду O2 можно упрощенно представить в виде набора последовательно включенных динамических звеньев (рисунок 7, а). Регулятор воздуха Wp(p) и участок воздухопровода Wоб1(p) образуют внутренний контур. Входными величинами этого контура являются управляющие воздействия Хзп1, возмущающие воздействия по расходу топлива и положению направляющих аппаратов ДРГ, а также воздействие корректирующего регулятора Wкор(p). Выходной величиной этого контура является давление воздуха Хрв.
Внутренний контур регулирования поддерживает заданное значение давления воздуха Хрв в соответствии с расходом топлива и степенью загрузки ДРГ, а также в соответствии с сигналом корректирующего регулятора. Так как инерционность участка воздухопровода является весьма незначительной, то может быть достигнуто значительное быстродействие этого контура регулирования без потери устойчивости. Переходные процессы во внутреннем контуре, вызванные изменением нагрузки котла или самопроизвольным изменением расхода топлива, завершаются раньше, чем эти же возмущения существенно повлияют на изменение выходной величины внешнего контура.
Передаточная функция Ф1(p) внутреннего малоинерционного контура регулирования имеет вид
. (4)
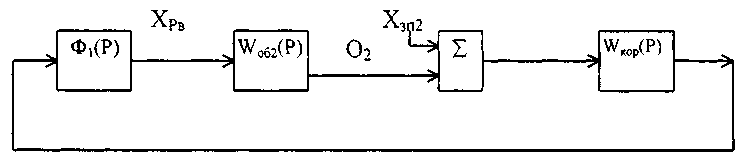
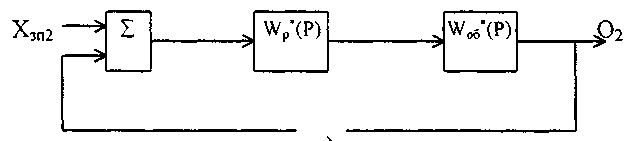
Внешний контур регулирования образуется корректирующим регулятором Wкор(p), малоинерционным контуром с передаточной функцией Ф1(p) и объектом регулирования с передаточной функцией Wоб2(p), входным воздействием которого является изменение давления воздуха Хрв, а выходным — изменение содержания свободного кислорода О2 в дымовых газах (см. рисунок 7, б).
Внешний контур характеризуется значительной инерционностью. Временная характеристика имеет вид, представленный на рисунке 6. Назначением внешнего контура является корректирование действий внутреннего контура в установившемся режиме, так как при компенсации возмущений топливом и загрузкой ДРГ внутренним контуром регулирования возможно появление ошибки из-за изменения качества топлива, нелинейности статических характеристик датчиков и других условий. Инерционность внешнего контура в основном определяется инерционностью датчика газоанализатора на О2 и газозаборным устройством.
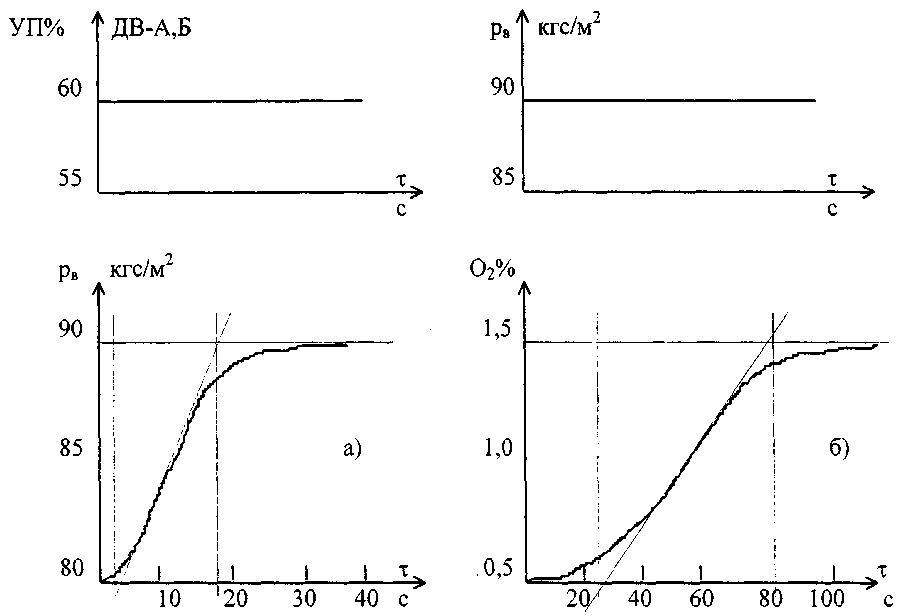
Рисунок 6 — Временная характеристика внутреннего (а) и внешнего (б) контура системы регулирования подачи воздуха
а)
б)
в)
Рисунок 7 — Структурные схемы системы регулирования подачи воздуха:
а — общая; б — эквивалентная; в — внешнего контура
Для расчета системы регулирования по внешнему контуру преобразуем структурную схему рисунка 7, б к стандартному виду. Обозначив произведение передаточной функции малоинерционного контура Ф1(р) и участка регулирования Wоб2(p) через передаточную функцию приведенного объекта , а корректирующий регулятор Wкор(p) — через приведенный регулятор
, получим структурную схему рисунка 7, в.
Передаточная функция Ф2(р) инерционного контура определяется по формуле
. (5)
Таким образом мы получили одноконтурную систему автоматического регулирования, состоящую из объекта регулирования и регулятора, методы расчета которой известны. Такое преобразование допустимо лишь в том случае, когда инерционность внутреннего стабилизирующего контура значительно меньше инерционности внешнего контура. При таком методе расчета приходится иметь дело не в чистом виде с объектом регулирования по внешнему контуру, а с некоторым приведенным объектом.
Таким образом для определения параметров динамической настройки корректирующего регулятора необходимо определить динамические характеристики приведенного объекта (см. рисунок 7, в). Регулирующим воздействием для приведенного объекта является воздействие корректирующего регулятора или равнозначное воздействие (ручное) через задающий интегратор (см. рисунок 4). Временная характеристика приведенного объекта регулирования по кислороду определяется в следующем порядке: система регулирования подачи воздуха по стабилизирующему контуру с выбранными параметрами динамической настройки включается в работу; стабилизируется режим работы котла (энергоблока); наносится возмущение задающим интегратором (или настроечным задатчиком ЗУЗ рисунка 4) и регистрируется во времени изменение содержания кислорода в дымовых газах. Из полученной временной зависимости определяются характеристики приведенного объекта τо, То, Ко и по методу, изложенному ниже, вычисляются параметры динамической настройки корректирующего регулятора.
Однако на стадии предварительного расчета параметров настройки (до включения регулятора в работу), принимая во внимание высокое быстродействие стабилизирующего регулятора, можно считать, что нанесение возмущения во внешний контур стабилизирующим регулятором эквивалентно дистанционному возмущению направляющими аппаратами ДВ. Отсюда характеристики приведенного объекта можно в первом приближении принять равными характеристикам объекта регулирования по внешнему контуру,
Методика определения параметров статической настройки регуляторов основана на составлении уравнений статического равновесия измерительной схемы прибора в некотором диапазоне нагрузок энергоблока, где характеристики датчиков и объекта регулирования линейны. При этом один из коэффициентов уравнения или задается, или определяется при пробных включениях регулятора, другой — рассчитывается из уравнения. Зону нечувствительности рекомендуют выбирать равной половине допустимой статической ошибки регулирования при эксплуатационных возмущениях. Параметры динамической настройки определяются из номограмм или по приближенным формулам в соответствии с характеристиками объекта регулирования. Их техническая реализация осуществляется в соответствии с особенностями аппаратуры и с учетом структуры замкнутого регулирующего контура.
Для обеспечения работоспособности регуляторов, использующих сигнал по топливу как на газе, так и на мазуте (а также и на смеси) без дополнительной статической перенастройки, сигналы расходов мазута и газа перед поступлением в схему регулятора должны быть статически совмещены на входе некоторого промежуточного элемента (например, сумматора), который условно можно назвать сумматором топлива (на рисунке 4 показан выходной сигнал этого сумматора, обозначенный Gт = Z(Gг + Gм).
1 Статическая настройка сигналов по расходу топлива
Рассчитываются следующие параметры:
- по Xг (Gг):
(Хг)макс м3/ч;
(Хг)ном м3/ч;
;
;
- по Хм (Gм):
(Хм)макс т/ч;
(Хм)ном т/ч;
;
.
Если предположить, что γм > γг, то значение коэффициента передачи сигнала по расходу газа (Кг) можно принять равным 1 и наоборот. Тогда чувствительность сигнала по расходу мазута Км рассчитывается по формуле
, (6)
где — изменение расхода газа в регулируемом диапазоне нагрузок котла согласно режимной карте, м3/ч;
— то же для мазута, т/ч.
Поскольку характеристики датчиков по расходу газа и мазута к котлу предварительно совмещены на входе сумматора топлива, то дальнейший расчет достаточно произвести только для одного вида топлива, например, мазута.
2 Преобразователи информации и характеристики объектов регулирования
Рассчитываются следующие параметры:
— промежуточный регулируемый параметр
;
— основной регулируемый параметр
;
— промежуточный задающий параметр
;
— основной задающий параметр
;
— датчики положения направляющих аппаратов ДВ
;
— оперативные задатчики ЗУ1 и ЗУ2
.
Задатчик ЗУЗ является наладочным и в полной схеме регулятора подачи воздуха не задействован.
Рабочий диапазон ЗУ1 по регулируемому параметру — ΔХрп2 %О2.
Рабочий диапазон ЗУ2 по регулируемому параметру — ΔХуп %.
Диапазон ЗУ1 и ЗУ2 по выходному сигналу — ΔХзу1 = ΔХзу2 %ЗУ.
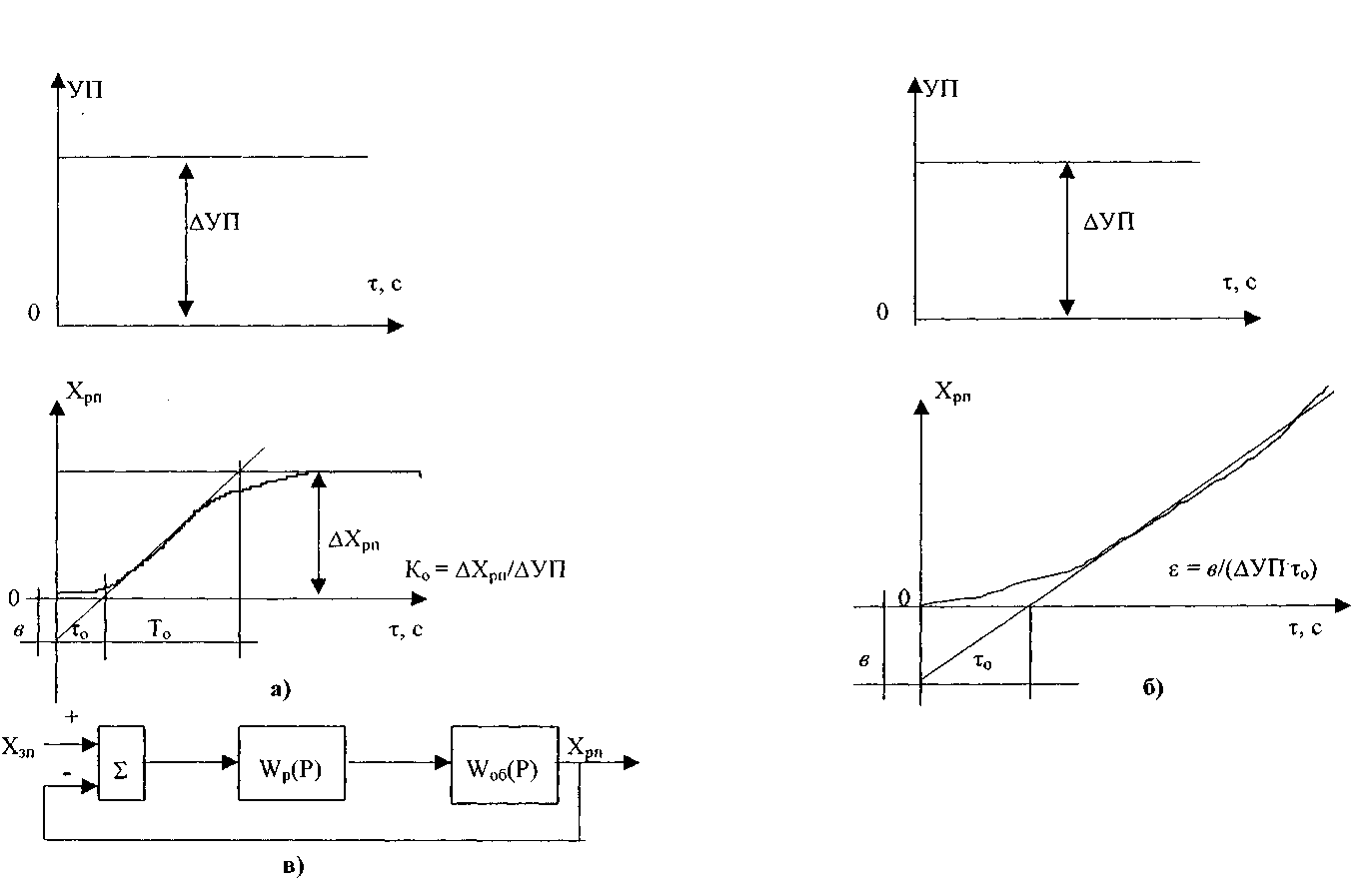
τо - условное запаздывание, с
То - условная постоянная времени, с
Ко - статический коэффициент усиления
УП - входное воздействие (положение регулирующего органа)
Хзп - задающий параметр
Хрп - регулируемый параметр
Wp(P), Wоб(P) - передаточные функции регулятора и объекта регулирования
Рисунок 8 — Переходные характеристики объекта с самовыравниванием (а), без самовыравнивания (б) и структурная схема одноконтурной АСР (в)
Характеристики объектов (из экспериментальных переходных характеристик рисунков 6, 8) следующие:
— по Хрп1 при возмущении регулирующим органом: τо1 с; То1 с; τо1/Tо1; Ко1
— по Хрп2 при возмущении Хрп1 (давлением воздуха) на нагрузке котла 50% номинальной: τо1 с; То2 с; τо2/То2; Ко2
— пульсации по Хрп1 при номинальной нагрузке характеризуются амплитудой (Ап кгс/м2) и периодом (Тпс);
— пульсации по Хрп2 отсутствуют.
Показатели качества переходных процессов регулирования в замкнутой АСР (желаемая точность регулирования) следующие:
— по Хрп1:
кгс/м2; Ψ = 0,9 при возмущении по регулирующему каналу;
— по Хрп2:
%О2; Ψ = 0,9 на нагрузке 50% номинальной при возмущении по регулирующему каналу.
Дополнительное требование к АСР (из режимной карты):
— соотношение «топливо — воздух» должно быть реализовано АСР при работе котла в регулировочном диапазоне нагрузок, составляющем 50-100% номинальной.
ΔХ2зп = (ΔХм)ном = (Х2зп)ном - (Х2зп)мин т/ч;
ΔXрп1 = (Хрп1)ном - (Xрп1)мин кгс/м2.
Диапазон работы корректирующего контура АСР по Хрп2 (О2) принимается равным (ΔХрп2)кор %О2, что составляет по Хрп1(рв) соответственно
кгс/м2, (7)
где Крп1 - коэффициент передачи по Xрп1 (рв) на входе регулятора соотношения «топливо — воздух».
Воздействие от корректирующего регулятора на регулятор соотношения «топливо — воздух» передается через интегратор (И) рисунка 4, диапазон работы которого после ограничения по максимальному и минимальному сигналу принимается равным 1 (для согласования с диапазонами других сигналов на входе регулятора соотношения «топливо — воздух»), т.е.:
(ΔХ)кор = 1,0 (100% УП).
При этом коэффициент передачи сигнала от интегратора корректирующего контура АСР по Хрп1 (рв) составит:
. (8)
3 Расчет соотношения «давление воздуха - УП направляющих аппаратов ДРГ»
При возмущении направляющими аппаратами ДРГ на величину ΔХ1зп %УП, значение необходимого статического приращения давления в перемычке за РВП (общем коробе), обеспечивающее сохранение прежнего расхода воздуха на котел, составит ΔХрп1 кгс/м2 (из экспериментальных характеристик объекта регулирования — в настоящих Методических указаниях не приводятся [9]).
Коэффициент передачи по каналу промежуточного задающего воздействия (от ДРГ) определяется по формуле
. (9)
4 Расчет соотношения «топливо - воздух»
Коэффициент передачи по каналу основного задающего воздействия (Gм) определим по формуле
, (10)
где Км — коэффициент передачи по расходу мазута на входе сумматора топлива (см. рисунок 4).
Коэффициент передачи по корректирующему параметру Ккор определяется по формуле
(11)
5 Расчет параметров настройки стабилизирующего контура
Коэффициент передачи оперативного задатчика ЗУ2 равен
, (12)
где КНА — коэффициент передачи по каналу от датчика положения направляющего аппарата ДВ.
Цена деления оперативного задатчика ЗУ2 находится по формуле
. (13)
Зона нечувствительности принимается равной половине допустимой статической ошибки регулирования при возмущении по регулирующему каналу
, %. (14)
Постоянная времени демпфера равна
где Ап — амплитуда пульсаций, пересчитанная в % по отношению к максимально возможному показанию датчика давления воздуха.
Постоянная времени интегрирования рассчитывается по формуле
, (16)
где — из номограммы рисунка 9.
Коэффициент передачи регулятора равен
, (17)
где (Ко1 Кр)опт — из номограммы рисунка 9.
Для внутреннего контура АСР, где последовательно с регулирующим прибором включен датчик давления воздуха, Кр вычисляется по формуле
, (18)
где - коэффициент передачи собственно регулирующего прибора;
Кизм - коэффициент передачи измерительной схемы прибора.
Приравнивая формулы (17) и (18), получим:
. (19)
6 Расчет параметров настройки корректирующего контура
Коэффициент передачи оперативного задатчика ЗУ1 вычисляется по формуле
, (20)
где Крп2 — коэффициент передачи по Хрп2(О2) на входе корректирующего регулятора.
Значение Крп2 (также как и Крп1) может выбираться произвольно и в дальнейшем корректируется при пробных включениях регулятора. При этом наладчики обычно ориентируются на характеристики регулируемого параметра: наличие пульсаций, диапазон изменения сигнала, крутизну характеристики датчика и т.п. Выбранное значение коэффициента передачи по параметру не влияет на устойчивость системы в целом, так как учитывается при расчете коэффициента передачи регулятора (формулы (19) и (27)).
Цена деления оперативного задатчика ЗУ1 определяется из следующего соотношения:
. (21)
Настройка блока нелинейных преобразований БНП (соотношение «кислород — нагрузка») осуществляется следующим образом:
Датчик расхода пара
.
Принимаем коэффициент передачи по каналу расхода пара на входе БНП равным 1.
Статическую зависимость «кислород — нагрузка» рисунка 4 аппроксимируем i-отрезками прямой линии. Для каждого участка аппроксимации имеем:
;
;
Коэффициент передачи по каналу расхода пара в блоке БНП по каждому участку аппроксимации определяется по формуле
, (22)
где Кп — коэффициент передачи по Gп на входе корректирующего регулятора.
Зона нечувствительности находится по формуле
%. (23)
Постоянная времени демпфирования ввиду отсутствия пульсаций по кислороду может быть принята равной нулю.
Постоянная времени интегрирования определяется по формуле
, (24)
где — из номограммы рисунка 9.
Коэффициент передачи регулятора находится из соотношения
, (25)
где (Ко2 Кр)опт — из номограммы рисунка 9.
Для внешнего контура АСР, где последовательно с регулирующим прибором включен датчик содержания кислорода и выходной интегратор, Кр вычисляется по формуле
. (26)
Приравнивая формулы (25) и (26), получим формулу
. (27)
а)
Параметр настройки | τo / То = 0 - 0,2 | 0,2 < τо/ То < 1,5 | τо / То > 1,5 |
δ | 1,l ετо | 2Ко | |
Ти | 3,3τо | 0,8 /(τо / То) | 0,6τо |
δ - степень связи (величина, обратная коэффициенту передачи регулятора)
б)
Рисунок 9 - Номограммы и таблица для определения параметров динамических настроек ПИ-регулятора в одноконтурной замкнутой АСР на объектах с самовыравниванием (а) при Ψ = 0,9 и на объектах с самовыравниванием и без самовыравнивания (б) при Ψ = 0,75
5 ОБЕСПЕЧЕНИЕ НАЛАДОЧНЫХ РАБОТ И ИСПЫТАНИЯ РЕГУЛЯТОРОВ ПРОЦЕССА ГОРЕНИЯ
Для успешного выполнения наладки и включения регуляторов процесса горения необходимо, как уже отмечалось в разделе 3, предварительно обеспечить нормальное функционирование всех элементов схем регулирования.
Датчики и аппаратура регулирования проверяются и настраиваются в лаборатории согласно заводским инструкциям по эксплуатации. Программирование микропроцессорных приборов Протар можно производить по месту установки последних, т.е. в панелях автоматики. При этом предварительно должна быть составлена программа функционирования прибора.
Важнейшим элементом системы регулирования является регулирующий орган. Характеристики направляющих аппаратов дымососов и ДВ в большинстве случаев удовлетворяют требованиям автоматики. Что же касается регулирующих органов подачи топлива в котел, то на мазутных трубопроводах, как правило, устанавливаются по два клапана (основной и пусковой) поворотного типа.
Недостатком поворотных клапанов является нерегулируемый пропуск среды в закрытом положении, имеющий в процессе эксплуатации тенденцию к росту, что неблагоприятно сказывается на регулировании расхода, особенно при пусках. Профили проходных сечений таких клапанов, выполненные в виде круглых отверстий, или прямоугольных окон в золотнике и гильзе, не обеспечивают требуемых (линейных) расходных характеристик.
По этой причине на электростанциях вместо двух поворотных клапанов подачи мазута в котел по инициативе наладочных организаций устанавливается один всережимный регулирующий шиберный клапан с конструктивной характеристикой, обеспечивающей прямолинейную расходную характеристику. Такой клапан может быть изготовлен на базе серийно выпускаемых (например, Чеховским заводом энергетического машиностроения) шиберных клапанов с условным диаметром, соответствующим диаметру мазутопровода котла. При выборе клапана под переделку необходимо обратить внимание на то, чтобы выбранный клапан был рассчитан на ру ≥ 60 кгс/см2 и оснащен сервоприводом с временем сервомотора не менее 50-60 с. Кроме того, ход штока должен быть больше (на величину перекрыши) высоты профиля во избежании недооткрытия клапана на максимальной нагрузке котла. Исполнение клапана принципиально не имеет значения. В шибере или седле клапана протачивается профиль, расчет которого производился из условия обеспечения прямолинейной расходной характеристики для всего диапазона работы котла, включая растопку.
На рисунках 10 и 11 показаны профили проходных сечений шиберных клапанов, выполненные соответственно в шибере и седле, для клапанов различного условного диаметра, но одинаковой пропускной способности 74,0 т/ч мазута при перепаде давлений 6,0 кгс/см2 (котлы паропроизводительностью до 1000 т/ч).
На рисунках 12 и 13 даны примеры профилей (в шибере и в седле соответственно) для клапанов также различных типоразмеров, обеспечивающих пропуск мазута в количестве 40-45 т/ч (котлы паропроизводительностью до 500 т/ч).
Регулирование расхода газа к котлу, так же как и расхода мазута, осуществляется, в основном, с помощью двух параллельно установленных поворотных заслонок, которым присущи следующие недостатки:
— круглая поворотная заслонка является полнопроходным регулирующим органом и в положении, близком к полному открытию, теряет свою дросселирующую способность и крутизну рабочей характеристики по сравнению с крутизной характеристики в начале открытия, которая, как правило, является чрезмерной;
— поворотная заслонка обладает неплотностью (начальным пропуском) в закрытом положении, достигающей значительных величин (около 10% максимального пропуска), что существенно затрудняет управление котлом в растопочном режиме.
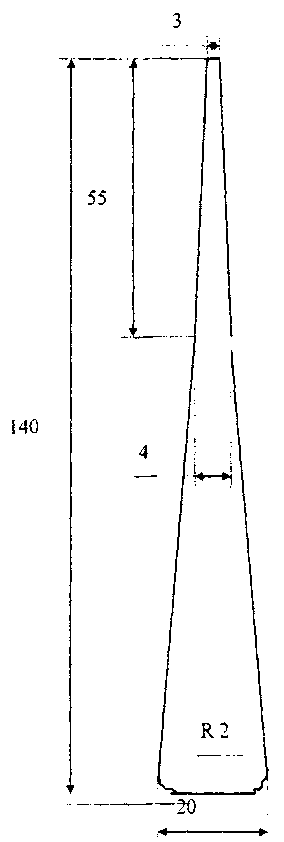
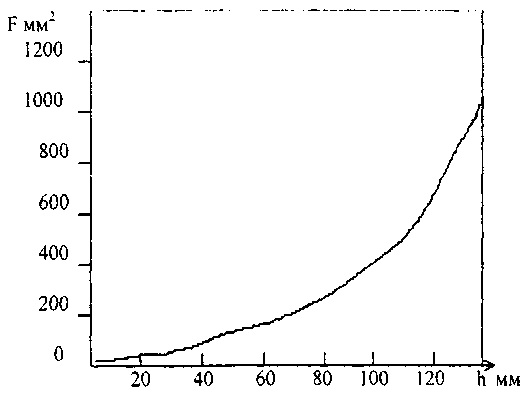
Рисунок 10 — Профиль и конструктивная характеристика мазутного клапана
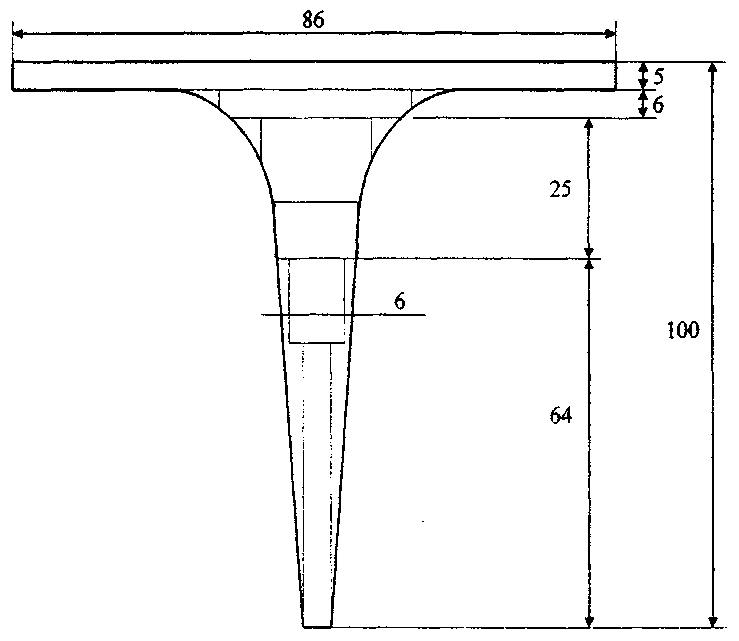
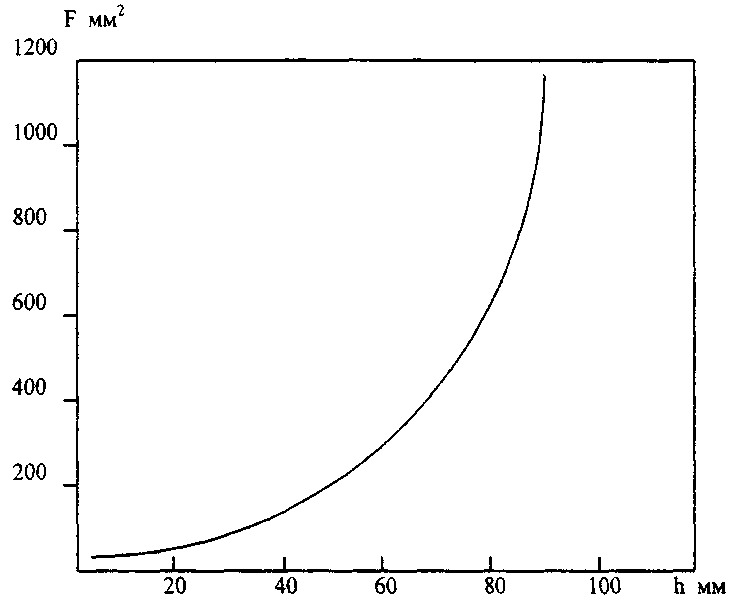
Рисунок 11 — Профиль и конструктивная характеристика мазутного клапана
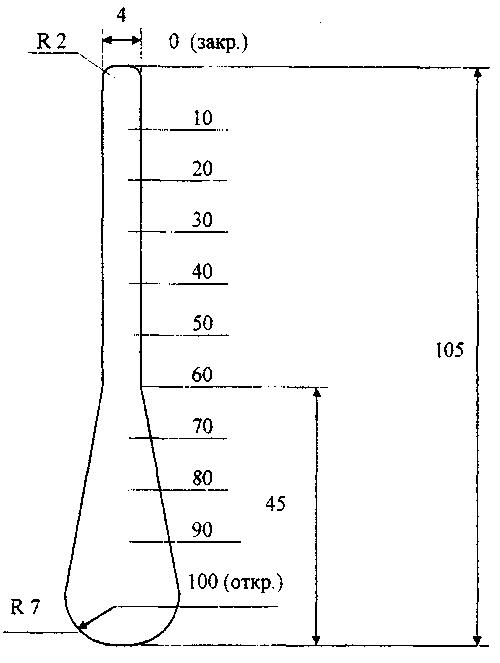
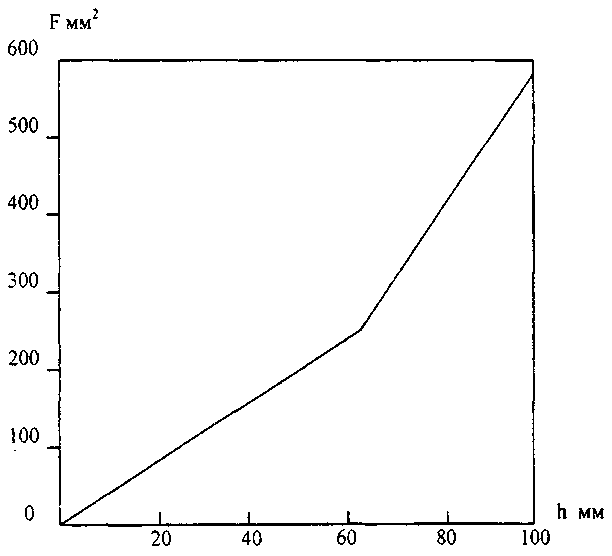
Рисунок 12 — Профиль и конструктивная характеристика мазутного клапана
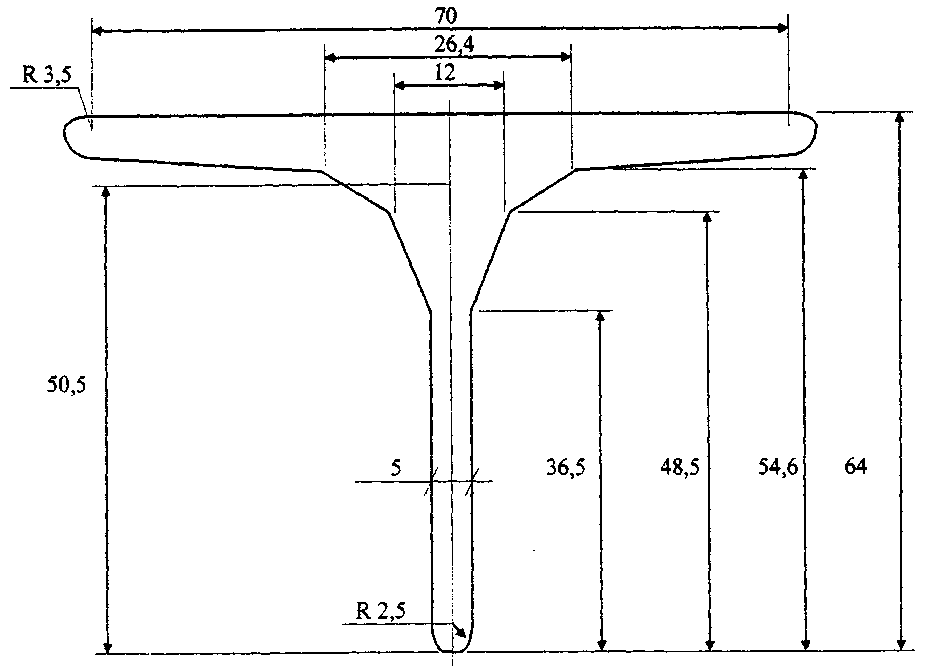
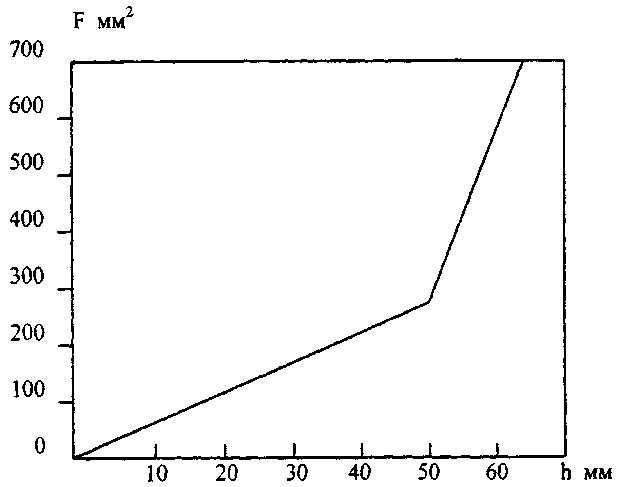
Рисунок 13 — Профиль и конструктивная характеристика мазутного клапана
Центральным ремонтно-механическим заводом (ЦРМЗ) Мосэнерго выпускается (не серийно, а по индивидуальным заказам) газовый регулирующий клапан, в котором устранены указанные выше недостатки, присущие заслоночным регулирующим органам.
Клапаны ЦРМЗ разработаны двух типоразмеров:
Dy 500 мм — для двухкорпусных котлов энергоблоков 300 МВт и котлов производительностью 420-640 т/ч;
Dy 400 мм — для котлов производительностью 170-320 т/ч.
Клапан двухседельный поворотного типа выполнен в патрубке соответствующего газопровода. Регулирующими элементами клапана являются разновеликие золотники, выполненные в форме полых полусфер, жестко сидящих на коромысле. Коромысло крепится на валу клапана с помощью шпонки с люфтом. При повороте вала по часовой стрелке из закрытого положения золотники выходят из проходных отверстий седел, тем самым открывая сечение для прохода газа. Профиль золотников в виде полусфер дает квадратичную конструктивную характеристику, следовательно, расходная характеристика клапана близка к линейной.
В закрытом положении золотники плотно прилегают к седлам с помощью резиновых прокладок. Плотность клапана в закрытом положении обеспечивается статическим давлением среды за счет разности усилий, действующих (вследствие перепада давлений) на нижний и верхний золотники. Нерегулируемый пропуск среды составляет не более 1% максимальной пропускной способности клапана при перепаде давлений среды на клапане 1 кгс/см2, при этом крутящий момент на приводном валу в сторону открытия составляет 7,5 кгм. Рабочий ход клапана — 60°. Исполнительный механизм для привода — МЭО-250/63-0,25-87, МЭО-250/160-0,63-87. Максимальное проходное сечение клапана Dy 500 мм составляет 628 см2, Dy 400 мм - 405 см2.
Приведение в соответствие с требованиями автоматического регулирования характеристик клапанов на газе и мазуте и вытекающее из этого упрощение технологической схемы подачи топлива к котлу (вместо двух клапанов — один) представляет важное значение не только с точки зрения автоматизации. Из процесса эксплуатации исчезает операция (выполняемая оператором вручную) по переходу с пускового клапана на основной и обратно, что положительно влияет на надежность работы основного оборудования.
Налаженные и прошедшие пробные включения с расчетными параметрами настройки регуляторы процесса горения подвергаются динамическим испытаниям на трех нагрузках котла в регулируемом диапазоне: максимальной, минимальной и промежуточной. Возмущения наносятся как регулирующим клапаном, так и ручным задатчиком. Корректировка параметров настройки (при необходимости) осуществляется из условия обеспечения максимального быстродействия в отработке возмущений при заданной степени затухания переходных процессов (ψ = 0,75-0,9). По результатам испытаний определяются компромиссные настройки регуляторов, приемлемые для всего диапазона нагрузок, или принимается решение о введении автоматической перенастройки регуляторов (см. раздел 3).
Качество поддержания технологических параметров регламентируется паспортными данными на конкретное технологическое оборудование, материалами руководящих организаций, отраслевыми и государственными стандартами [1]. В общем случае оно зависит от характеристик оборудования (объекта управления) и систем автоматического регулирования, которыми это оборудование оснащено.
Требования к качеству поддержания технологических параметров составляются с учетом выполнения требований к оборудованию, регулирующим органам и устройствам измерения, изложенным в [8], при условии исправности основного и вспомогательного оборудования, соблюдении заданных условий его эксплуатации. Эти требования применительно к системам автоматического регулирования процесса горения сводятся к следующему:
1. Устойчивая работа (отсутствие автоколебаний) и ограниченная частота включений регуляторов, которая при постоянной заданной нагрузке котла не должна превышать в среднем 6 включений в 1 мин.
2. Максимальные отклонения основных технологических параметров при постоянной заданной нагрузке котла в пределах регулировочного диапазона нагрузок не должны превышать приведенных ниже значений:
— давление пара перед турбиной (в режиме номинального давления и при поддержании давления автоматикой котла, включая регулятор топлива) — ±2%;
— содержание кислорода в дымовых газах для мазутных котлов при малых избытках воздуха и постоянной времени кислородомера не более 1,5 мин — ±0,2% О2;
— то же для остальных котлов — ±0,5% О2;
— разрежение в топке — ±2 кгс/м2.
Для регулятора подачи воздуха проводятся также статические испытания, где уточняются расчетные соотношения «топливо — воздух» и «кислород — нагрузка», в режимах изменения нагрузки котла от минимальной до максимальной.
Правильность выбранного соотношения «топливо — воздух» проверяется изменением нагрузки при отключенном корректирующем регуляторе по кислороду, без динамических сигналов и отсутствии возмущений со стороны ДРГ. В качестве главного оценочного критерия принимается значение статического отклонения кислорода от заданной режимной зависимости при изменении расхода топлива. Коррекцией коэффициента передачи по каналу расхода топлива добиваются минимально возможных отклонений кислорода при максимально допустимых эксплуатационных изменениях нагрузки.
После завершения настройки регулятора соотношения «топливо — воздух» включается полная схема регулятора воздуха и корректируется статическая зависимость «кислород — нагрузка». Если при работе котла в регулируемом диапазоне корректором устанавливается значение кислорода, отличное от режимных указаний, уточняется коэффициент передачи по каналу расхода пара (на соответствующем участке аппроксимации).
По завершении испытаний максимальные динамические отклонения кислорода от значений, заданных режимной картой, не должны превышать в среднем 0,5% при нормальной эксплуатационной скорости изменения нагрузки. Эта скорость на блочных энергоустановках лимитируется турбиной и обычно составляет от 3 до 5 МВт/мин. Оптимально настроенный регулятор подачи воздуха обеспечивает необходимые требования по поддержанию воздушного режима на котлах, работающих с малыми избытками воздуха, при этом функции корректирующего регулятора сведены до минимума. Одновременно минимизируется степень влияния дополнительных сигналов, например, скоростного сигнала по изменению расхода топлива на входе регулятора.
Испытания по уточнению расчетного статического соотношения «УП ДРГ — воздух», если регулятор общего воздуха реализован по схеме рисунка 4, проводят после проверки на действующем объекте расчетного соотношения «топливо — воздух» и корректировки параметров динамической настройки регулятора. При неизменной нагрузке блока наносится возмущение направляющими аппаратами ДРГ и путем коррекции расчетного коэффициента передачи по каналу УП ДРГ восстанавливается значение кислорода на прежнем уровне после завершения переходного процесса. Такие испытания проводятся на минимальной, средней и максимальной нагрузках регулируемого диапазона. Определяется компромиссная настройка коэффициента передачи, дающая удовлетворительные результаты на всех нагрузках.
Приложение А
ПРИМЕРЫ РЕАЛИЗАЦИИ СХЕМ АСР ПРОЦЕССА ГОРЕНИЯ НА МИКРОПРОЦЕССОРНОЙ ТЕХНИКЕ ПРОТАР
Приборы Протар являются универсальными многофункциональными устройствами, не требующими проектной компоновки и могут использоваться в режиме свободно программируемого пользователем алгоритма. Приборы имеют высокую точность установки и воспроизводимости параметров настройки.
Конфигурация любой схемы регулирования осуществляется внутри прибора программным путем. Программа, для составления которой не требуется специальных знаний в области математического программирования, представляет собой последовательности команд в виде функций Fj, каждая из которых представляет собой самостоятельный блок структурной схемы, и переменных Пj, которые представляют собой сигналы, параметры настройки и результаты вычислений. Состав переменных и наименование параметров настройки приведены ниже, а диапазоны их изменения указаны в заводских инструкциях на приборы (см., например, [4]). Как будет показано далее, записанная программа по существу является символическим описанием конфигурируемой структуры.
Приборы Протар ориентированы на работу в комплекте с серийно выпускаемыми датчиками технологических параметров с выходными сигналами постоянного тока или напряжения. Прибор, как правило, управляет одним исполнительным устройством, однако имеется возможность реализации на базе одного прибора двухканального регулирования.
Приборы Протар содержат аппаратное устройство ввода информации, аппаратное устройство вывода информации, встроенный или выносной пульт оператора, источники основного и резервного питания и программируемое цифровое вычислительное устройство.
Элементы функциональной схемы первых пяти узлов реализованы аппаратно и соответствуют физическим элементам прибора. Элементы функциональной схемы шестого узла — программируемого цифрового вычислительного устройства — реализованы программно и не имеют соответствия в физической структуре прибора. Однако при эксплуатации и настройке прибора удобно представлять элементы функциональной схемы этого узла как реально существующие физические элементы, отвлекаясь от способа их воплощения. Такое изображение схемы регулирования, реализованной в данном приборе, можно назвать функциональной схемой регулятора.
Рассмотрим реализацию на аппаратуре Протар-112 схем АСР процесса горения, изображенных на рисунках 1-3, 5 (данный материал подготовлен И.И. Лебедевым).
Таблица A.1 - Программа функционирования прибора Протар-112.
Регулятор расхода (давления) газа к котлу
Шаг | Команда | Примечание | Шаг | Команда | Примечание | Шаг | Команда | Примечание | ||
00 | F18 | 34 | F00 | 68 | — | |||||
01 | F17 | 35 | — | 69 | — | |||||
02 | F23 | Извлеч. кв. корня | 36 | — | 70 | — | ||||
03 | F28 | «÷» | 37 | — | 71 | — | ||||
04 | П00 | 38 | — | 72 | — | |||||
05 | F41 | ↓ | 39 | — | 73 | — | ||||
06 | П15 | 40 | — | 74 | — | |||||
07 | F16 | Δрг | 41 | — | 75 | — | ||||
08 | F23 | Извлеч. кв. корня | 42 | — | 76 | — | ||||
09 | F27 | «х» | 43 | — | 77 | — | ||||
10 | П15 | 44 | — | 78 | — | |||||
И | F41 | ↓ | 45 | — | 79 | — | ||||
12 | У. | Gг c коррекцией | 46 | — | 80 | — | ||||
13 | F36 | Перекл. qм | 47 | — | 81 | — | ||||
14 | П18 | 48 | — | 82 | — | |||||
15 | F21 | Инверсия | 49 | — | 83 | — | ||||
16 | F19 | Nзд от САУМ | 50 | — | 84 | — | ||||
17 | F47 | Демпфер | 51 | — | 85 | — | ||||
18 | t7 | t демпф. | 52 | — | 86 | — | ||||
19 | F41 | ↓ | 53 | — | 87 | — | ||||
20 | Рo | Задание | 54 | — | 88 | — | ||||
21 | F40 | ↑ | 55 | — | 89 | — | ||||
22 | h | РЗД-12 | 56 | — | 90 | — | ||||
23 | F27 | «x» | 57 | — | 91 | — | ||||
24 | с5 | 58 | — | 92 | — | |||||
25 | F25 | « + » | 59 | — | 93 | — | ||||
26 | П01 | Смещ. РЗД | 60 | — | 94 | — | ||||
27 | F41 | ↓ | 61 | — | 95 | — | ||||
28 | дo | 62 | — | 96 | — | |||||
29 | F01 | ПДД1 -1 канал | 63 | — | 97 | — | ||||
30 | F40 | ↑ | 64 | — | 98 | — | ||||
31 | П18 | 65 | — | 99 | — | |||||
32 | F41 | ↓ | 66 | — | ||||||
33 | J2 | Инв. вх. Комп. 1 | 67 | — |
Таблица А.2 - Переменные, параметры настройки прибора Протар-112.
Регулятор расхода (давления) газа к котлу
Переменная | Величина | Примечание | Переменная | Величина | Примечание | Переменная | Величина | Примечание | ||
U | С1 | * | Коэф. пропорц. | П00 | * | |||||
А | var | Δpг | t1 | * | t интегр. | = д | ||||
b | var | td | 0 | t дифференц. | П01 | |||||
С | var | Cd | 0 | Коэф. дифференц. | = С1 | |||||
d | var | Nзд от САУМ | У1 | var | Σ шим | П02 | ||||
е | dt | * | Длит-ть импульса | = t1 | ||||||
h | var | РЗД-12 | Е1 | var | Вход ШИМ | П03 | ||||
У | J1 | * | Уст. Комп.1 | = td | ||||||
| | var | Bx. (qб) + (qм) = q1 | J2 | var | П04 | |||||
|| | Bx. (q+) + (q-) = q11 | dJ | * | Зона возв. Комп. 1 | = Сd | |||||
E | var | Рассогл. 1 — кан. | L1 | Уст. Комп. 2 | П05 | |||||
с0 | L2 | Nзд от РТНГМ | = У1 | |||||||
c1 | * | Коэф. вход А | dL | Зона возв. Комп. 2 | П06 | |||||
с2 | * | Коэф. вход b | Гo | 1,0 | Парам. Отк. Е.01 | = дt | ||||
с3 | * | Коэф. вход С | У. | П07 | ||||||
с4 | * | Коэф. вход d | У | П08 | ||||||
с5 | * | Коэф. вход h | У- | П09 | ||||||
с6 | У1 | П10 | ||||||||
с7 | t11 | П11 | ||||||||
U1 | У11 | П12 | ||||||||
U2 | Uo | П13 | ||||||||
Ро | var | Исходное зад. | t1 | * | Пост. врем. вх. А | П14 | ||||
дo | * | Операт. зад. | t2 | * | Пост. врем. вх. b | П15 | var | |||
до | 100,0 | Предел опер. зад. | t3 | * | Пост. врем. вх. d | П16 | var | Δpг | ||
Уо | var | Рo + дo | t4 | 9999 | Пост. врем. вх. d | П17 | var | |||
P | var | Эквив. параметр | t5 | * | Пост. врем. вх. h | П18 | var | |||
to | * | t фильтра | t6 | П19 | var | Nзд от САУМ | ||||
tс | * | Пост. балансир. | t7 | * | Пост. врем. вх. d | |||||
д | * | Зона неч-ти | t8 | |||||||
* Переменные и параметры настроек, значения которых будут определены при наладке регулятора. | ||||||||||
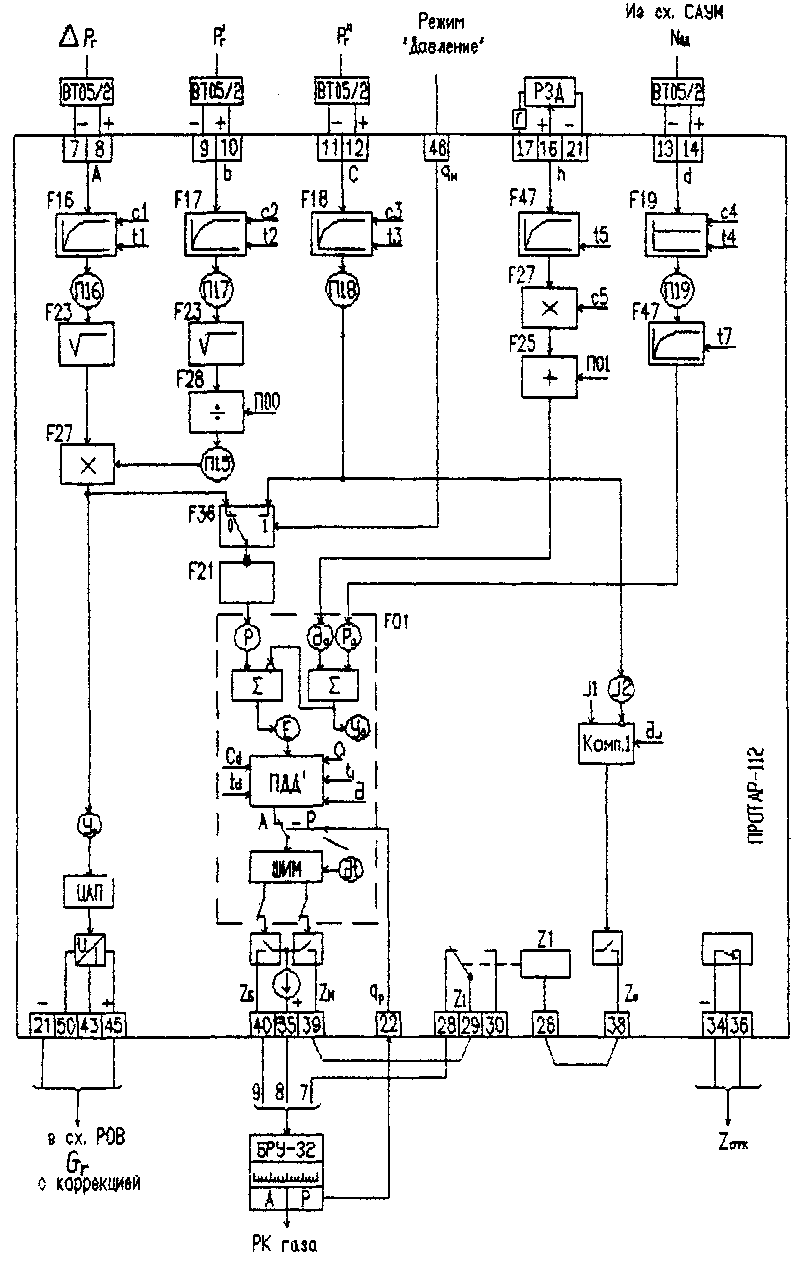
Рисунок 14 — Функциональная схема регулятора расхода (давления) газа к котлу
А.1 Регулятор расхода (давления) газа к котлу
Регулятор реализован в отдельном приборе Протар-112. Функциональная схема регулятора представлена на рисунке 14, программа функционирования регулятора дана в таблице А.1, параметры настроек — в таблице А.2.
Входные аналоговые сигналы:
— перепад на расходомерной шайбе на линии подачи газа —Δрг (А — вход прибора Протар);
— давление газа перед измерительным устройством — (b);
— давление газа за регулирующим клапаном — (С);
— задание нагрузки из схемы САУМ — Nзд (d);
— от ручного задатчика РЗД-12 (h).
Входные дискретные сигналы:
— БРУ-32 регулятора в положении «Ручн.» (qр);
— переключатель режима работы в положении «Давление» (qм).
Выходные сигналы:
— расход газа с коррекцией по давлению (Gг) — идет в схему регулятора общего воздуха.
Функционирование регулятора
Регулятор расхода (давления) реализован на основном канале регулирования (функция F01).
При переключателе режима работы в положении «Давление» работает регулятор давления газа, в противном случае — регулятор расхода газа.
В прибор Протар на вход А подается сигнал от датчика перепада на расходомерной шайбе на линии подачи газа. Сигнал демпфируется и масштабируется (F16), извлекается квадратный корень (F23) и результат умножается на переменную П15 для получения сигнала по расходу газа (Gr) с учетом коррекции по давлению . Скорректированный сигнал по расходу идет на вход переключателя F36, засылается в переменную У и с выхода прибора Протар сигнал 0-5 мА идет в схему РОВ (см. рисунок 2).
Сигнал по давлению газа за регулирующим клапаном поступает на вход С, масштабируется и демпфируется и далее идет на вход переключателя F36.
При переключателе режима работы в положении «Давление» регулируемым параметром является давление газа (в переменную Р засылается П18); в противном случае — расход газа Gг (переключатель F36).
Задание регулятору формируется в схеме САУМ: Nзд поступает на вход d, демпфируется и масштабируется и засылается в переменную Ро. Задание регулятору корректируется задатчиком РЗД в пределах ± 5% (переменная до).
При давлении газа меньше уставки срабатывания J1 срабатывает компаратор 1 и разрывается цепь «Меньше» регулятора.
А.2 Регулятор расхода (давления) мазута к котлу
Регулятор реализован в отдельном приборе Протар-112. Функциональная схема регулятора представлена на рисунке 15, программа функционирования регулятора дана в таблице А.3, а параметры настроек — в таблице А.4.
Входные аналоговые сигналы:
— расход мазута — Gм (A);
— давление мазута за регулирующим клапаном — (b);
— задание нагрузки из схемы САУМ — Nзд (С);
— от ручного задатчика РЗД-12 (h).
Входные дискретные сигналы:
— БРУ-32 регулятора в положении «Ручн.» (qр);
— переключатель режима работы в положении «Давление» (qм).
Таблица А.3 - Программа функционирования прибора Протар-112.
Регулятор расхода (давления) мазута к котлу
Шаг | Команда | Примечание | Шаг | Команда | Примечание | Шаг | Команда | Примечание | ||
00 | F17 | рм | 34 | — | 68 | — | ||||
01 | F16 | Gм | 35 | — | 69 | — | ||||
02 | F36 | Перекл. qм | 36 | — | 70 | — | ||||
03 | П17 | рм | 37 | — | 71 | — | ||||
04 | F41 | ↓ | 38 | — | 72 | — | ||||
05 | Р | 39 | — | 73 | — | |||||
06 | F18 | Nзд | 40 | — | 74 | — | ||||
07 | F41 | ↓ | 41 | — | 75 | — | ||||
08 | Ро | Задание | 42 | — | 76 | — | ||||
09 | F40 | ↑ | 43 | — | 77 | — | ||||
10 | h | РЗД-12 | 44 | — | 78 | — | ||||
11 | F47 | Демпфер | 45 | — | 79 | — | ||||
12 | t5 | t демпф. | 46 | — | 80 | — | ||||
13 | F27 | «х» | 47 | — | 81 | — | ||||
14 | с5 | 48 | — | 82 | — | |||||
15 | F25 | « + » | 49 | — | 83 | — | ||||
16 | П01 | Смещ. РЗД | 50 | — | 84 | — | ||||
17 | F41 | ↓ | 51 | — | 85 | — | ||||
18 | до | 52 | — | 86 | — | |||||
19 | F01 | ПДД1 -1 канал | 53 | — | 87 | — | ||||
20 | F40 | ↑ | 54 | — | 88 | — | ||||
21 | П17 | Рмаз | 55 | — | 89 | — | ||||
22 | F41 | ↓ | 56 | — | 90 | — | ||||
23 | J2 | Инв. вх. Комп. 1 | 57 | — | 91 | — | ||||
24 | F00 | 58 | — | 92 | — | |||||
25 | — | 59 | — | 93 | — | |||||
26 | — | 60 | — | 94 | — | |||||
27 | — | 61 | — | 95 | — | |||||
28 | — | 62 | — | 96 | — | |||||
29 | — | 63 | — | 97 | — | |||||
30 | — | 64 | — | 98 | — | |||||
31 | — | 65 | — | 99 | — | |||||
32 | — | 66 | — | |||||||
33 | — | 67 | — |
Таблица А.4 - Переменные, параметры настройки прибора Протар-112.
Регулятор расхода (давления) мазута к котлу
Переменная | Величина | Примечание | Переменная | Величина | Примечание | Переменная | Величина | Примечание | ||
U | С1 | * | Коэф. пропорц. | П00 | * | Смещ. РЗД | ||||
А | var | Pм | t1 | * | t интегр. | = д | ||||
b | var | Gм | td | 0 | t дифференц. | П01 | ||||
С | var | Nзд от САУМ | Cd | 0 | Коэф. дифференц. | = C1 | ||||
d | У1 | var | Σ шим | П02 | ||||||
е | dt | * | Длит-ть импульса | = t1 | ||||||
h | var | РЗД-12 | Е1 | var | Вход ШИМ | П03 | ||||
У | J1 | * | Уст. Комп. 1 | = td | ||||||
| | var | Вх. (qб) + (qм) = q1 | J2 | var | Рм | П04 | ||||
|| | Вх. (q+) + (q-) = q11 | dJ | * | Зона возв. Комп. 1 | = Cd | |||||
E | var | Рассогл. 1 — кан. | L1 | Уст. Комп. 2 | П05 | |||||
с0 | L2 | Nзд от РТНГМ | = У1 | |||||||
c1 | * | Коэф. вход А | dL | Зона возв. Комп. 2 | П06 | |||||
с2 | * | Коэф. вход b | Гo | 1,0 | Парам. Отк. Е.01 | = dt | ||||
с3 | * | Коэф. вход С | У. | П07 | ||||||
с4 | У | П08 | ||||||||
с5 | * | Коэф. вход h | У- | П09 | ||||||
с6 | У1 | П10 | ||||||||
с7 | t11 | П11 | ||||||||
U1 | У11 | П12 | ||||||||
U2 | Uo | П13 | ||||||||
Ро | var | Исходное зад. | t1 | * | Пост. врем. вх. А | П14 | ||||
дo | * | Операт. зад. | t2 | * | Пост. врем. вх. b | П15 | ||||
до | 100,0 | Предел опер. зад. | t3 | * | Пост. врем. вх. С | П16 | var | Рм | ||
Уо | var | Ро + до | t4 | П17 | var | Gм | ||||
P | var | Эквив. параметр | t5 | * | Пост. врем. вх. h | П18 | var |
|