РД 153-34.3-48.513-98
РОССИЙСКОЕ АКЦИОНЕРНОЕ ОБЩЕСТВО
ЭНЕРГЕТИКИ И ЭЛЕКТРИФИКАЦИИ «ЕЭС РОССИИ»
ДЕПАРТАМЕНТ СТРАТЕГИИ РАЗВИТИЯ НАУЧНО-ТЕХНИЧЕСКОЙ ПОЛИТИКИ
МЕТОДИКА
ЭКСПЛУАТАЦИОННОГО ОБСЛУЖИВАНИЯ УСТРОЙСТВ ТЕЛЕМЕХАНИКИ НА УРОВНЕ ЦДП ЭНЕРГОСИСТЕМЫ
РД 153-34.0-48.513-98
УДК 621.311
Дата введения 2000-06-01
РАЗРАБОТАНО Открытым акционерным обществом "Фирма по наладке, совершенствованию технологии и эксплуатации электростанций и сетей ОРГРЭС"
Исполнитель Я.В. Лурье
УТВЕРЖДЕНО Департаментом стратегии развития и научно-технической политики РАО "ЕЭС России" 15.12.98 г.
Первый заместитель начальника А.П. Берсенев
ВВЕДЕНО ВПЕРВЫЕ
В энергосистемах России находятся в эксплуатации различные устройства телемеханики, на базе которых функционирует иерархическая система передачи оперативных данных (СПОД).
Для сбора, обработки, отображения и ретрансляции телеинформации на более высокий уровень управления энергетикой широкое применение нашли программируемые микроЭВМ РПТ-80.
В работе приведены методы обслуживания современных центральных приемопередающих станций (ЦППС), реализованных на базе микроЭВМ РПТ-80.
1. ЭКСПЛУАТАЦИОННОЕ ОБСЛУЖИВАНИЕ ЦППС ТИПА РПТ-80
В энергосистемах России на всех уровнях диспетчерского управления находят применение программно-аппаратные телекомплексы. Наиболее массовое применение получили микроЭВМ РПТ-80, которые по существу являются многопроцессорными программными телекомплексами, позволяющими принимать информацию от различных типов устройств телемеханики, обрабатывать ее и, с одной стороны, выводить для отображения на приборы, диспетчерский щит, дисплей, а с другой - передавать в канал телемеханики для ретрансляции на вышестоящий диспетчерский пункт. Кроме того, имеется возможность вывести информацию для передачи в другую ЭВМ (обычно в миниЭВМ различных типов).
Программное обеспечение микроЭВМ РПТ-80 является специальным, специфичным, учитывающим наличие в эксплуатации различных типов устройств телемеханики, находящихся на энергообъектах (электростанциях, подстанциях, ДП ПЭС), а также задачи диспетчерского управления.
Широкое внедрение микроЭВМ РПТ-80 в качестве телекомплексов (ТК) стало возможным благодаря использованию в их составе программируемых канальных адаптеров (ПКА). Последние программируются для работы с различными типами устройств телемеханики (УТМ).
Функция ПКА - принять информацию из канала телемеханики, проверить достоверность, сравнить ее с той, которая находится в базе данных (поле мгновенных значений - PMZ) и в случае отличия записать в буфер поля декодирования (РДК), оттуда информацию считывает и обрабатывает центральный процессор (CPU), выполняя комплекс программ базового программного обеспечения (БПО).
Функцию преобразования последовательного кода в параллельный и наоборот выполняет в ПКА элемент 8251, у которого есть регистры: состояния и данных. Бит 02 в регистре состояния указывает на готовность для процессора считывать байт информации из элемента. Бит 01 в этом же регистре указывает на готовность записать байт в элемент. Таким образом, наблюдая за битом 02, можно судить об исправности канала, передающего аппарата, правильности полярности линии. Не во всех программах для ПКА регистр состояния переписывается в свободную ячейку ОЗУ. Рекомендуется дополнить программу вставкой для обеспечения этой возможности. Это связано с тем, что ячейку ОЗУ ПКА можно вывести на табло инженерного пульта, а регистр состояния элемента 8251 - нельзя.
1.1. Организация таблиц, базы данных, полей и буферов в РПТ-80
Таблицы исходных данных
Все исходные данные хранятся в постоянной памяти ППЗУ и могут меняться в процессе эксплуатации.
Буфер ДК на одно направление занимает 16 либо 32 байта, в зависимости от скорости в канале телемеханики.
При расчете длины ДК необходимо подсчитать время передачи четырех информационных слов в канале. Если время передачи четырех слов не менее 100 мс, то достаточно иметь буфер на 16 байт. В противном случае буфер ДК приема должен иметь 32 байта.
На одно информационное слово (ТИ или ТС, ЦБИ, СЛИ) буфер ДК имеет следующую структуру:
1.1.1. Первый байт - байт состояния, по числу в этом байте центральный процессор (программа РR/ЕМ) и адаптер ПКА (программа в адаптере) взаимодействуют между собой.
01 - место в ДК свободно для записи адаптером;
88 - информация вида ТИ;
81 - информация вида ТС;
02 - центральный процессор не успевает принимать информацию;
84 - информация вида ЦБИ;
90 - информация вида СЛИ;
40 - идет чтение информации ЦП-ом;
20 - информация принята адаптером по квазициклу.
1.1.2. Остальные 3 байта:
а) для ТИ и ТС:
старший байт адреса в PMZ;
младший байт адреса в PMZ;
информация;
б) для ЦБИ:
номер направления;
FF или FE - признак ЦБИ;
информация;
в) для СЛИ:
номер направления;
старший байт СЛИ;
младший байт СЛИ.
По заполнению буфера ДК можно судить о правильности запуска программ центрального процессора. Если все места в буфере ДК заняты, то канальный адаптер запишет информацию на занятое место и в первую ячейку запишет 02.
Если данный буфер разбирается, то признак 02 снимается, но наличие его запоминается в ячейке 1708 (01), где он будет находиться до тех пор, пока не пройдет рестарт системы. Наличие 02 в ДК и 01 в 1708 требует уменьшения времени разбора буфера ДК центральным процессором (но такое уменьшение может плохо отразиться на работе других программ).
Длина буфера ДК задается в таблице SUTM.
Канальный адаптер записывает информацию в ДК приема в следующих случаях:
принятая информация отличается от PMZ;
наличие признака необходимости информации по таблице TABPRI (оба случая должны иметь место одновременно).
1.2. Ориентация в базовом программном обеспечении микроЭВМ РПТ-80, работающей в режиме ЦППС
Программы ЦП:
1.2.1. Фон, начальный адрес А400. Запуск с консоли через 2-ю функцию (затем два раза пробел).
В фоне ЦП выполняет следующие программы:
временной контроль приема ЦБИ;
временной контроль передачи ЦБИ;
запуск адаптера ретрансляции;
разбор служебной информации из MEVSL;
контроль приема от низовых устройств телемеханики
и передача сообщения на верхний уровень;
перекомпоновка ТС;
запись признаков перевода ТИ-ТС на ручное управление (отображение на щит через ВТИС);
отображение аналоговых ТИ и ТС на щит (ВТИС);
отображение информации из ЭВМ на щит (ВТИС);
контроль за работой адаптеров;
оценка состояния каналов;
перезагрузка ОЗУ КП;
переключение каналов по команде;
контроль связи с ЭВМ и вывод на пульт;
вывод текущего времени от часов;
масштабирование.
1.2.2. Фон-программа, замкнутая в кольцо.
Имеется несколько задач, которые прерывают фон, их периодически запускает операционная система RPS.
Ниже перечислены эти задачи с указанием периода их запуска:
Задача 08 (период в сек 0,001) | - вывод на цифровой индикатор инженерного пульта до трех ячеек памяти. Начальный адрес задачи 66АО. Адреса ячеек оператор записывает с дисплея по адресам 2F00-2F05. |
Задача 09 | - загрузка данных из таблиц ППЗУ в ОЗУ выполняется однократно при рестартах. Начальный адрес 9800. Оператор может запустить задачу (в системе без автозапуска), установив курсор по адресу 9800, и нажать клавишу S однократно. |
Задача 0А (период 0,005) | - прием, т.е. обслуживание буферов ДК приема, в которые информацию записывают процессоры канальных адаптеров (по прямому доступу к оперативной памяти). Начальный адрес программы 8С00. Запуск через 4-ю функцию с дисплея (в системе без запуска). |
Задача 0В (период 0,005) | - передача, т.е. обслуживание буферов ДК передачи. Процессоры канальных адаптеров считывают информацию из них для передачи. Начальный адрес 8000. Запуск аналогичен программе прием. |
Задача 0С (период 0,00А) | - ввод в ЭВМ из РПТ-80, т.е. обслуживание буферов, из которых адаптер передает информацию. Начальный адрес 9200. |
Задача 10 | - однократный вывод кадра на дисплей № 2 (№ 1). Начальный адрес С006. |
Задача 11 | - услуги на удаленном дисплее № 2. Начальный адрес С009. (Обязательно установить кабель с разъемом на плату РТ-25, у которой адрес 3Е). |
Задача 12 | - однократный вывод кадра на дисплей № 1 (№ 2). Начальный адрес С00С. |
Задача 13 (период 0,06) | - периодичность обновления экрана. Начальный адрес C00F. |
Задача 14 | - печать для АЦПУ. Начальный адрес С012. |
Задача 15 (период 0,001) | - проверка интервала. Начальный адрес Е1С0. |
Задача 2F (период 0,00A) | - контроль неисправности в канале. Начальный адрес 9А50. |
Задача 50 (период 0,003F) | - передача информации из РПТ в CPU № 3. Начальный адрес 8АЕ0. |
Задача 0,6 | - обработка прерывания 6-го уровня от CPU3. Начальный адрес 8ВЕ8. |
1.3. Порядок действий оператора при вводе в эксплуатацию пользовательского программного обеспечения для микроЭВМ РПТ-80
1.3.1. Проверить установку всех необходимых плат:
РТ-11 - плата центрального процессора; РТ-45 (2 шт.) - платы ОЗУ: одна с адресом 1000, другая - 2000; плата РТ-30 - генератор (на нее устанавливается разъем от инженерного пульта); платы РТ-40 - операционная система RPS и таблицы; плата РТ-43 - пользовательские программы, разработанные ВНИИЭ; РТ-9 - плата аккумулятора.
1.3.2. В этот же каркас установить программируемые канальные адаптеры РТ-27.
1.3.3. В ППЗУ на плате РТ-11 по адресу 06 ВА должна быть записана граница обнуления ОЗУ ЦПом, т.е. число 2F.
1.3.4. Установить в другой каркас платы синхронизаторов РТ-28 и соединить их штатными кабелями с РТ-27 и каналами телемеханики.
1.3.5. На платах РТ-27 должны быть установлены ППЗУ объемом 2 Кбайта с программами приема-передачи от соответствующих устройств телемеханики (ТМ512, ГРАНИТ, РПТ-80 и т.д.).
1.3.6. На плате РТ-40 по адресу 6400 должна быть составлена таблица приемников, 6500 - таблица передатчиков, 6700 - начальные адреса буферов, массивов, константы, таблица задействованных устройств SUTM с адреса 67А0-67BF. Если направление или адаптер не задействованы, отмечается 00.
1.3.7. Таблица признаков ТАВРRI вначале может быть вся FF, потом ее следует записать (как и все другие) в соответствии с отчетом ВНИИЭ.
1.3.8. Проверить в 6754, 6753 объем поля мгновенных значений (PMZ) и если там записано 00ED, то объем PMZ-12FF (начиная с 1000, записано в обратном коде и байты переставлены местами, так нужно по условиям работы программы).
В ячейке 1708 указывается признак того, что ЦП успевает или нет разбирать ДК.
1.4. Запуск периодической задачи в микроЭВМ РПТ-80
На цифровые индикаторы инженерного пульта требуется вывести три ячейки, адреса которых, например, 2F43, 2F44, 2F45.
В ОЗУ ЦП записывается программа, которая печатается с консольного дисплея. Адреса цифровых индикаторов 08, 0А, 0В.
LXI H, 2F43 | ; | занести в регистры HL адрес 2F43. |
MOV A, M | ; | перенести содержимое ячейки, адрес которой 2F43→Ак. |
OUT 08 | ; | вывести содержимое аккумулятора на левый индикатор. |
LXI H, 2F44 | ; | можно занести любой другой адрес, поэтому LXI, а не INX H). |
MOV A, M OUT 0A LXI H, 2F45 MOV A, M OUT 0B | ||
CALL 004C | ; | уход в операционную систему. |
Дальнейший порядок действий оператора для запуска периодической задачи:
в списке услуг Видеотона нажать цифру 6 далее (пробел);
ответ Code: (запрос кода задачи). Нужно выбрать любой код кроме тех, которые уже есть. Например: 44 ;
Priority: (запрос приоритета). Ответ: 44 ;
ЕСВ: (требуется отвести две свободные строки, начиная с определенного адреса, например, 2Е00).
Ответ: 2Е00 (символ пробела);
stac: (требуется указать начало стека для задачи). Например, ответ: 2EFF;
программа Program: | (запрос начального адреса нашей задачи). Ответ: 2D00 |
Таким образом, производится описание Compose задачи через 6-ю услугу.
Далее нужно задачу запустить. Это делается через 4-ю услугу:
Нажать: 4
Ответ: Code
Напечатать: 44 (три пробела)
Ответ: В
Напечатать период запуска задачи
Например, ответ: 0001 1=100 мс)
Задача запущена
Останов задачи через 7-ю функцию.
Задача будет работать до тех пор, пока не произойдет рестарт либо останов ее через 7-ю функцию.
Если требуется вывести на цифровые индикаторы ячейки ОЗУ какого-либо канального адаптера, то программа должна содержать в тексте останов и запуск адаптера с указанием его адреса.
Например:
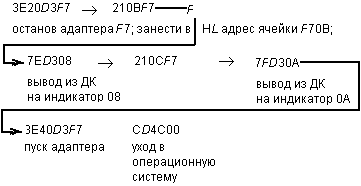
Та же программа на языке ассемблер:
MVI А, 20 | ; | |
OUT F7 | ; | останов адаптера F7. |
LXI H, F70B | ; | адреса в ОЗУ |
M0V A, M OUT 08 | ; ; | ячеек, за которыми ведется наблюдение |
LXI H, F70C M0V A, M | ; | |
OUT 0A | ; | |
MVI A, 40 OUI F7 | ||
CALL 004C; HOME | (в систему) |
1.5. Порядок действий оператора при работе с программатором инженерного пульта микроЭВМ РПТ-80
1.5.1. Установить в правое гнездо подсхемник ППЗУ 2 Кбайта и зажать.
1.5.2. Повернуть переключатель вправо, после чего загорится светодиод.
1.5.3. Включить питание пульта.
1.5.4. С консольного дисплея вызвать 0-ю услугу RPS.
1.5.5. На вопрос: тип? ответить 2 (при ППЗУ 2 Кбайта).
1.5.6. Ответить 2 (чтение).
1.5.7. Указать адрес, начиная с которого содержимое ППЗУ будет считано в ОЗУ (обычно 1000 или 2000).
Каждый ответ сопровождать нажатием клавиши пробел.
После чтения сравнить содержимое ППЗУ и его копии в ОЗУ с помощью функции сравнения (3). Если ответ identifical, то все нормально, если ответ error, то следует заново переписать ППЗУ функцией 2.
При записи в ППЗУ следует предварительно подержать ее под лучами ультрафиолетовой лампы 10 мин, а затем воспользоваться функцией 1 все той же 0-й услуги RPS. При записи пробел нужно нажать два раза подряд. На цифровом индикаторе инженерного пульта отражаются адреса в ППЗУ в процессе записи.
1.6. Включение новой программы для работы в операционной системе RPS
1.6.1. Найти свободный объем памяти на ППЗУ для размещения текста программы в шестнадцатиричных кодах.
1.6.2. С помощью программатора инженерного пульта "прожечь" текст программы в ЧИП.
1.6.3. Найти места для таблиц в ППЗУ, которыми должна пользоваться программа, и заполнить их.
1.6.4. Продолжить или добавить существующие таблицы (таблица признаков, таблица перекомпоновки ТС, таблица 6700 и другие таблицы).
1.6.5. В таблице 6600 прожечь сведения о новой программе: номер программы, приоритет, ТСВ, стек, начальный адрес программы. Предварительно нужно найти место в ОЗУ, свободное для ТСВ и стека.
1.6.6. Заполнить "цепочку" запуска программы: по адресу 6667 (или где-то в этом месте) записать коды
01 16 00 CD 43 00 22
(где 16 00 - это период запуска программы (0016); 22 - номер задачи. Остальные числа всегда постоянные).
1.6.7. Рекомендуется, прежде чем окончательно запустить задачу, описать ее с помощью 6-й функции RPS, а затем запустить с помощью 4-й функции RPS. Если программа работает без рестартов, можно задействовать цепочку запуска.
1.7. Проверка правильности работы программы
Порядок проверки рассматривается на примере программы вывода информации ТС на приборы СО-ТС диспетчерского щита через канальный адаптер РТ-27
1.7.1. Программа начинает работать после того, как в ячейке ОЗУ 1717 число 88 заменяется на 08, что означает окончание двухминутной задержки для заполнения PMZ информацией, поступающей от передатчиков через канальные адаптеры после рестарта.
1.7.2. Производится циклический просмотр информации ТС в поле PMZ в соответствии с таблицей признаков ТАВРRI и таблицей, заполненной для данной программы-TPATS (не путать с ТРАТС).
1.7.3. Информация ТС записывается в отведенную строку. Ее начальный адрес обычно известен при согласовании с разработчиком программы (например 1В30).
1.7.4. Все выше указанные действия производятся программой, которая является периодической задачей для ЦП. Для этой задачи должно быть составлено описание и она должна включаться в цепочку запуска задач ЦП.
1.7.5. Программа в канальном адаптере считывает информацию из указанной строки (1В30), перекомпоновывает ее и выводит в канал связи в последовательной форме (3-е направление, адаптер РТ-27 переделан на 9600 Бод).
1.7.6. Для контроля кодовой последовательности, выводимой адаптером в канал связи, следует воспользоваться специальной программой ДАТАСКОП, запускаемой в персональном компьютере. Ввод в компьютер - через СОМ порт.
1.7.7. При отсутствии или неправильно выводимых адаптером кодовых числах следует выполнить операции:
сравнить с эталоном тексты программ в адаптере и задачи для ЦП;
проверить, отмечены ли соответствующие разряды в ТАВРRI, а именно 20 и 21;
проверить правильность заполнения таблицы TRATS и наличие записи начального адреса в таблице 6700;
открыть страницу, отведенную для ТСВ и СТЕКА задачи ЦП, и проверить факт их заполнения;
остановить адаптер, сделать изменение одного ТС в поле ДК приема, просмотреть числа в специально отведенной строке (1В30).
1.8. Методика пользования программой контроля каналов телемеханики
1.8.1. Текст программы записан на диске в секторе 02В0.
Переписать текст в ППЗУ 2 Кбайта и установить в адаптер, к которому подключен исследуемый канал телемеханики. Скорость адаптера установить 1200 Бод.
1.8.2. В таблице 6700 по адресам 67DE и 67DF записать адрес 2F40 - это адрес свободной строки.
1.8.3. По адресу 2F50 записать число 34 для проверки основного канала или число 36 для проверки резервного канала (1-е направление в адаптере).
1.8.4. После отработки программы по адресу 2F40 и далее будут записаны числа:
2F40 | 2F41 | 2F42 | 2F43 | 2F44 | … |
% | байт | 2-е направление | |||
искажение | состояния | в адаптере | |||
Байт состояния: | 40 – работа фазовой защиты, 02 – нет синхронизации. | ||||
1.9. Проверка исправности дисплея диспетчера
1.9.1. Дисплей диспетчера управляется от платы РТ-25 с адресом ЗЕ. Проверить его исправность можно с помощью 8-й функции русского меню услуг.
1.9.2. Порядок действий оператора:
Нажать клавишу 8.
Command?
Ответ: 24 пробел.
Устройство?
Ответ: 10 пробел.
Далее задать адрес буфера - 4050.
Задать длину буфера - 40.
Адрес для ТСВ?
Ответ: 1500 пробел.
1.9.3. При исправном дисплее на экране должно появиться название услуги, т.е. текст.
1.10. Методика отыскания причины рестарта в микроЭВМ РПТ-80
1.10.1. Рестарт в РПТ-80 сопровождается обнулением ОЗУ, кроме страницы 2F00-2FFF.
На заполнение PMZ отводится обычно 2 мин (в ячейке 1717 число 88 должно замениться на 08).
1.10.2. Исследование причины рестарта следует проводить следующим образом:
пользуясь функцией 7 услуг RPS (стоп периодическая задача) последовательно останавливать задачи, имея в виду:
Номер задачи | Назначение |
08 | вывод на инженерный пульт любых трех ячеек. |
09 | загрузка исходных данных после рестарта (запуск нажатием клавиши S). |
0А | программа прием, переписывает данные из ДК приема в PMZ и другие буферы. |
0В | программа передача, записывает информацию для передачи в ДК передачи. |
0С | программа ввода информации в миниЭВМ. |
10 | однократный вывод кадра на дисплей № 2. |
11 | услуги для дисплея № 2. |
12 | |
13 | периодическое обновление экрана. |
14 | печать на АЦПУ. |
15 | проверка интервала. |
22 | вывод информации на СО-ТС. |
23 | программный фильтр для защиты от недостоверной информации ТС (разработка ОРГРЭС) |
1.10.3. Если после останова задачи рестарты прекратятся, можно полагать, что остановленная программа является причиной рестартов. Следует переписать текст программы заново на ППЗУ.
1.10.4. Возможной причиной рестартов может быть программа вывода информации на щит диспетчера через плату адаптера. Частые остановы и запуски адаптера от ЦП иногда приводят к отсутствию сигнала ответа от платы адаптера.
Рекомендуется переделать программу таким образом, чтобы адаптер нужную информацию считывал из ОЗУ ЦП по прямому доступу и ЦП не управлял адаптером.
Другой причиной рестарта может быть незавершенность работы той или иной программы пользовательского программного обеспечения.
Для отыскания причины рестартов в эксплуатационных условиях рекомендуется следующая методика:
заменить ППЗУ с адресом 4000 на ППЗУ 4000 без запуска периодических задач;
стартовать программу "ФОН" с помощью функции № 2 операционной системы RPS;
стартовать программу загрузка. Для этого открыть ячейку 9200. Подвести курсор к 9200 и нажать клавишу S;
запускать с дисплея отдельные задачи, пользуясь функциями № 6 и 4 операционной системы RPS. При диалоге указывать номера задач, адреса ТСВ, стек, приоритет (те, что записаны в таблице, начиная с адреса 6600).
После пуска каждой задачи отмечать наличие или отсутствие рестарта (если проходит рестарт, то на консольном дисплее появляется меню системы RPS, а в ячейке 2FFF (счетчик рестартов) добавляется единица.
Все запущенные задачи будут работать до тех пор, пока не возникнет рестарт.
В случае, если запущена задача, которая вызывает рестарт, следует заново переписать ППЗУ, на которых записана эта задача;
по окончании заменить ППЗУ 4000 на ППЗУ 4000 с запуском задач.
Для устранения рестартов, вызванных частыми остановами канального адаптера, следует реконструировать программу адаптера и ЦП таким образом, чтобы процессор адаптера читал ячейки в ОЗУ ЦП (по прямому доступу), а ЦП не останавливал плату адаптера. (Конкретная реализация по договору с АО "Фирма ОРГРЭС").
1.11. Подготовка параметров ТИ для их обработки РПТ-80
1.11.1. Для обработки параметра ТИ, принимаемого в РПТ-80 канальным адаптером, следует заполнить таблицу.
1.11.2. Расчет и заполнение параметров МК1 и МК2 в таблице производится в следующем порядке:
1.11.2.1. Сложить нижний и верхний пределы (для 0 квант и для 250 квант).
1.11.2.2. Результат умножить на коэффициент 256/250=1,024.
1.11.2.3. МК2 - это величина, соответствующая 0 квант, переведенная в шестнадцатиричную форму.
1.11.2.4. МК1 - это величина, полученная как разность п.1.11.2.2 минус МК2 и пересчитанная в шестнадцатиричную форму.
1.11.3. Величины МК2 и МК1 заносятся в таблицу ТАМ, МК2 - в 9-й и 10-й байты, МК1 - в 7-й и 8-й байты.
1.11.4. На стр. 2F00 записать программу:
LXI D, &MK1 | ; | значение в квантах |
LXI B, &MK2 | ; | значение в квантах |
LXI H, &NN | ; | NN - значение ТИ в квантах (от 00 до FF) |
CALL B090 MOV A, D | ; | результат в DE |
OUT OA MOV A, E | ; | адрес цифрового индикатора |
OUT OB RET | ; | адрес цифрового индикатора |
Программа проверяет правильность подсчета МК1 и МК2.
1.11.5. Таблица масштабных коэффициентов и пределов для ТИ (ТАМ):
1.11.5.1. Таблица ТАМ содержит две точки характеристики каждого ТИ МК1 и МК2, которые рассчитываются пo п.1.11.2 и занимают четыре байта (см. п.1.11.3).
В таблице указывается также адрес данного УТМ по таблице MPOVUT.
1.11.5.2. Для повышения достоверности информации используется адрес дублирующего ТИ, если таковое имеется.
1.11.5.3. Адрес таблицы ТАМ записан в 6772, 6773.
Таблица ТАМ занимает 10 байт на одно ТИ:
1-й байт - признаки;
2-й байт - относительный адрес УТМ в таблице MPOVUT, т.е. номер направления (от 00 до 63);
3-й байт - относительный адрес в MPOVUT для дублирующего ТИ (при отсутствии дубля записывается FF);
4-й байт - относительный адрес в таблице PREDELOV;
5-й байт - адрес в PMZ дублирующих ТИ (младший байт),
6-й байт - адрес в PMZ дублирующих ТИ (старший байт);
7-й байт - младшая часть МК2 (верхняя точка характеристики);
8-й байт - старшая часть МК2;
9-й байт - младшая часть МК1 (нижняя точка характеристики ТИ);
10-й байт - старшая часть МК1.
Конец таблицы ТАМ - FF FF.
1.11.5.4. Результат работы программы заносится в буфер отмасштабированных величин. Его начальный адрес в 6776.
На каждое ТИ в буфере МАS (отмасштабированных величин) отводится три байта: два байта информационных и один байт признаков. В байт признаков заносятся:
27=1 признак недостоверности ТИ по показателям в MPOVUT.
26=1 признак нарушения пределов.
1.11.5.5. Содержание байта признаков (1-й байт в таблице ТАМ):
D0 - вывод на цифровые приборы;
D1 - векторное изображение ТИ;
D2 - вектор вертикальный;
D3 - инверсия нужна (нет);
D4 - контроль пределов;
D5 - контроль неизменяемости ТИ;
D6, D7 - свободные биты.
1.11.5.6. Таблица PREDEL
Значения, которые записываются в таблицу PREDEL, это шестнадцатиричные значения квантов, которые соответствуют значениям пределов.
Таблица пределов составляется только для тех ТИ, которые по желанию диспетчера имеют контролируемые пределы. На каждое ТИ и его дубль в таблице занимается четыре байта. Счет в таблице четверок - 00, 01, 02, 03.
Если 3-е ТИ в таблице ТАМ, то в таблице PREDEL оно может быть 00 или 01, или 02.
1.11.6. Таблица для подсчета суммарных значений TSUM:
Таблица состоит из адресов слагаемых ТИ, записанных в буфере отмасштабированных значений, количества слагаемых в сумме (в двоичном коде), адреса суммируемых значений в PMZ, масштабных коэффициентов для демасштабирования признаков слагаемых значений. Конец таблицы FF FF.
Содержание на одно суммарное значение:
1-й байт - знаки слагаемых: 0 - плюс, 1 - минус
27 - знак первого слагаемого;
26 - знак второго слагаемого;
2-й байт - тоже знаки слагаемых (если их больше 8);
3-й байт - количество слагаемых в сумме (d7, d6, d5, d4) и характер суммы;
4-й байт - адрес суммы в PMZ (младший байт);
5-й байт - адрес суммы в PMZ (старший байт);
6-й байт и до n-го байта - порядковые номера слагаемых в буфере МАS отмасштабированных значений ТИ.
Сn+1, n+2 байта масштабный коэффициент МК2 - верхняя точка характеристики.
n+3, n+4 масштабный коэффициент МК1 - нижняя точка характеристики.
Последние два байта - адрес суммы в PMZ.
Полученная сумма записывается в поле отмасштабированных значений BSUM, а также после демасштабирования в поле PMZ (начальный адрес BSUM - в 6778).
2. МЕТОДИКА ЭКСПЛУАТАЦИОННОГО ОБСЛУЖИВАНИЯ ПРИ СОПРЯЖЕНИИ микроЭВМ РПТ-80 С ТК ТИПА ГРАНИТ
2.1. Многоуровневая система телемеханики (МСТ) характеризуется наличием промежуточных диспетчерских пунктов.
Для МСТ характерно наличие ретрансляции на промежуточных диспетчерских пунктах для дальнейшей передачи на вышестоящий ДП.
2.2. В ряде энергосистем нашел применение способ ретрансляции, как трансляция всей информации, поступающей от КП ГРАНИТов через КП-ретранслятор, в роли которого использован каркас с резервными линейными узлами (ЛУ) аппарата ПУ ГРАНИТ. Отбор необходимого объема информации производится в приемопередающей станции ЦППС типа РПТ-80 на верхнем уровне управления.
2.3. Для ретрансляции информации по указанному варианту все каналы телемеханики от КП ГРАНИТов подключаются либо к отдельному КП ретранслятору, либо используется каркас с резервными линейными узлами, который может иметь до 15 линейных узлов типа КС 52.30.
2.4. Информация в канал телемеханики для передачи на вышестоящий ДП выводится через ЛУ-0 от системной централи (СЦ) аппарата ПУ.
2.5. Скорость передачи устанавливается перемычками в КП-ретрансляторе. Такая же скорость устанавливается в плате адаптера РТ-27 РПТ-80.
2.6. Для приема телеинформации в адаптер устанавливается ППЗУ 2 кбайта, в которой записана программа приема телеинформации от ретранслятора. Указанная программа может принимать информацию от четырех направлений.
2.7. Для работы программы требуется заполнить таблицу приема, отличающуюся от таблицы с адресом 6400. Расположить таблицу следует в ППЗУ адаптера после программы начиная с адреса 0690. В таблице записать трехбайтные числа. В первом байте указывается номер КП, а в двух последующих - адрес специальной таблицы дополнительных сведений (ТДС). Адреса, как принято в РПТ-80, записываются вначале - младший байт, затем - старший байт.
2.8. Таблица ТДС заполняется следующим образом. В первом байте таблицы записывается число 20, что указывает на то, что далее следуют сведения об объектах телесигнализации (ТС), затем указывается номер группы ТС (00 - нулевая группа), далее указывается адрес в PMZ ЦП, куда должна записываться принятая адаптером информация ТС, далее записывается число, которое отражает реальные байты ТС, которые из данной группы должны помещаться в PMZ. При этом имеется в виду, что группа ТС-восемь байтов и эта восьмерка в распределительном коде читается слева-направо. Например, число 91 (10010001) означает, что выбирается только 1-й, 4-й и 8-й байты из группы. Далее записывается байт 00. На этом заполнение таблицы ТДС для нулевой группы заканчивается.
2.9. Аналогично заполняются сведения в таблице ТДС для группы 01 и т.д. Конец заполнения сведений о ТС-байт FF. Затем заполняются сведения о ТИ. В первом байте записывается число 60, далее номер группы, далее адрес в PMZ, далее два байта чисел, отражающие нужные для записи в PMZ байты из группы (в группе ТИ-16 байт). Окончание сведений о ТИ два байта FF FF.
2.10. Таблица 6400 заполняется для адаптера следующим образом:
в первых двух байтах указывается адрес строки поля декодирования (как для других адаптеров РПТ-80), далее до конца строки FF;
задействуется еще одна строка для адаптера, в которой указываются константы по 4-м направлениям для счетчиков сбоев и константы по 4-м направлениям для перегрузки адаптера (3f-1 мин).
Можно не занимать строки в таблице 6400, в этом случае начиная с адреса 0700 записать необходимые данные. При этом в программе по адресу 02DD вместо числа 64 нужно записать 07.
2.11. Таблица ТДС должна быть заполнена для тех КП, которые корреспондируют от КП ретранслятора (физически присутствуют в канале).
2.12. Недопустимо не заполнить номера групп по той или иной функции, если они присутствуют в канале.
2.13. Два входа платы РТ-28, через которые принимается информация, должны быть запараллелены.
2.14. Полярность сигнала должна быть такова, что сигнал на 3-й ножке элемента 8251 в адаптере расположен с паузой на линии 0 В.
2.15. Для контроля за принимаемой телеинформацией персонал должен остановить адаптер. Для этого нужно:
открыть с дисплея оператора ячейку 1769 и записать туда 00;
на стр. 2F00 найти свободную строку и записать текст программы останова адаптера;
ЗЕ 20 D3 FN C9; N - номер адаптера;
подвести курсор на начало этой программы останова адаптера 3Е и нажать клавишу S;
вызвать страницу ОЗУ адаптера: FN 00 пробел;
осмыслить числа в буфере приема по данному направлению.
3. ГРАНИЦЫ ЭКСПЛУАТАЦИОННОГО ОБСЛУЖИВАНИЯ
3.1. Передача телемеханических данных, ведущаяся в реальном масштабе времени, характерна тем, что система телемеханики (СТ) требует стандартов с жесткими требованиями, а именно:
высокая степень готовности;
высокая достоверность данных;
малое время передачи с целью реагирования на события в реальном масштабе времени;
высокая эффективность передачи информации;
правильная работа при наличии мощных электромагнитных наводок и разностей потенциалов земли.
Одним из препятствий для выполнения этих требований является отсутствие четко установленных границ эксплуатационного обслуживания устройств, входящих в понятие система телемеханики, а также нормирование сигналов на границах.
3.2. При выходе из работы устройства (системы) телемеханики и отыскании повреждения приходится определять последовательно, где проявляется неисправность; в самом устройстве или в канале связи, в аппарате ПУ или КП, в цепях кодирования на стороне КП и т.п. При этом проверяется напряжение источников питания, уровень и форма сигналов в канале связи, основные параметры серии импульсов (кодовых посылок). Поскольку техническая эксплуатация устройств ТМ и аппаратуры каналов связи осуществляется разным персоналом (служб, групп), важно определить границы обслуживания и параметры сигналов на границах.
Персонал группы телемеханики (ТМ), осуществляя постоянный контроль за работой устройств ТМ (путем непосредственного наблюдения или сообщения дежурного диспетчера), фактически контролирует неисправность каналов ТМ и, как правило, раньше, чем персонал службы (группы) связи, узнает о повреждении каналов.
Поэтому при нарушении действия УТМ персонал группы телемеханики обязан в первую очередь определить причину нарушения:
неисправность канала или устройства ТМ и при неисправности канала сообщить об этом персоналу связи.
О выявленных повреждениях и принятых для их устранения мерах персонал групп телемеханики и связи информирует друг друга.
Принцип инженерно-экономической целесообразности положен в основу предложений по нормированию сигналов на границах обслуживания. Принцип заключается в получении таких конечных характеристик сигнала, которые, с одной стороны, позволяли бы обеспечить достаточно надежную работу сопрягаемых устройств, а с другой стороны, не приводили бы к значительному усложнению и удорожанию аппаратуры.
3.3. Широкое применение микропроцессорной техники привело к тому, что в СТ 4-го поколения микропроцессору получена реализация различных задач, в том числе обмена с периферийными модулями. В связи с разнообразием объектов управления создание унифицированных устройств сопряжения с объектом (УСО) является сложной задачей. Даже если принять во внимание нормирование входных и выходных сигналов остается много варьируемых параметров для создаваемых УСО: число входных и выходных сигналов; кодирование и дешифрация цифровых сигналов; одноканальность и многоканальность преобразователей аналоговых сигналов; конструктивно-технологические особенности. Трудности унификации УСО связаны также с временными характеристиками объектов. Схемотехника УСО изменяется в зависимости от того, с какой периодичностью надо опрашивать или выдавать управляющие сигналы, требуется или нет быстрая реакция на изменения значений сигналов (прерывания основной программы), какой способ выбран для борьбы с дребезгом контактов. Многие функции реализуются в СТ программно, но часто требуется специальная аппаратура.
3.4. Для обеспечения помехоустойчивой передачи как цифровых, так и аналоговых сигналов необходимо каждый сигнал передавать по отдельной перевитой паре проводов, а весь жгут заключать в металлический экран. Экран следует заземлять только с одной стороны либо у источника, либо у приемника сигналов, там, где имеется общая заземленная точка. Если же приемник сигнала и источник сигнала имеет каждый свое заземление, то экранирование не защищает от проникновения помехи общего вида, вызванной разностью потенциалов общих точек питания источника и приемника. В этом случае нужно вводить гальваническую развязку цепей источника и приемника с помощью оптронов.
4. ГРАНИЦЫ ОБСЛУЖИВАНИЯ И СИГНАЛЫ МЕЖДУ УСТРОЙСТВАМИ ТЕЛЕМЕХАНИКИ И АППАРАТУРОЙ КАНАЛОВ ТЕЛЕМЕХАНИКИ
4.1. Граница обслуживания по кабелям, связывающим аппаратуру каналов с устройствами телемеханики, устанавливается: на КП на зажимах панели телемеханики, на ПУ на станционной стороне кросса, объединяющего все каналы.
4.2. Приемка каналов телемеханики производится по окончании работ по проверке и наличии данных в протоколе проверки канала.
Для частотно-уплотненных каналов релейных устройств ТУ-ТС проверяется значение искажений импульсов, пауз и селективных пауз в канале. Необходимо измерить ток в линейных цепях релейных устройств ТУ-ТС (релейных типов).
Для бесконтактных УТМ необходимо измерить амплитуду, длительность и форму сигналов на выходе и входе ДП и КП и сопоставить с требованиями заводских параметров и протоколов наладки (проверки).
4.3. Параметры, которые необходимо контролировать:
допустимые пределы изменений сопротивления шлейфов и утечки линий для физических цепей связи;
напряжение питания линейных цепей;
грозозащищенность воздушных линий (разрядники, предохранители);
уровни напряжений и допустимые пределы их отклонений на входе и выходе аппаратуры каналов и устройств ТМ;
форму кривой для устройств ТИ старых типов;
допустимые искажения импульсов, пауз, селективных пауз;
значение допустимого запаздывания в канале;
допустимые искажения при определении скорости в канале.
4.4. К каналу телемеханики могут подключаться передающие устройства телемеханики импульсных систем с активными и пассивными выходными цепями.
В устройствах телемеханики 1-го поколения (ТУ-ТС, не циклических), как правило, имеет место пассивная выходная цепь на канал телемеханики. Если при этом применяются модемы старых типов, то возможно использование в тональных приемниках импульсных сигналов поляризованных реле. Реле должно быть нейтрально отрегулировано с междуконтактным зазором 0,1 мм. Мощность в цепи, разрываемой контактами поляризованного реле, не должна превышать 4,0 Вт. Напряжение на разорванных контактах не должно превышать 60 В. Якорь реле в приемнике телемеханики не должен быть подвержен вибрации, приводящей к дроблению посылок.
4.5. Параметры первичного сигнала (сигнал от датчика информации) на входе канала телемеханики должны представлять собой двухполярные импульсы постоянного тока. Номинальное значение амплитуды напряжения на входе КТМ должно соответствовать одному из значений ряда: ±2,4; ±6,0; ±12 В. Пульсации выпрямленного напряжения, из которых формируются дискретные посылки, не должны превышать 1%.
Допустимое изменение номинального значения амплитуды напряжения посылки на входе КТМ должно быть не более:
±20% при использовании передатчика модема с узлом формирования посылок;
±5% при использовании передатчика модема без узла формирования посылок.
Пределы допустимых отклонений длительности посылок не должны превышать 15% номинального значения исправляющей способности, указанной в технических условиях на аппаратуру.
Посылки на входе не должны иметь дробления.
4.6. При двухполярном первичном сигнале номинальное значение амплитуды напряжения на выходе КТМ, нагруженном на номинальную нагрузку, должно соответствовать одному из значений ряда: ±2,4; ±6,0; ±12 В.
Допустимое изменение амплитуды напряжения сигнала на выходе КТМ не должно превышать:
30% при нагрузке КТМ на приемное устройство телемеханики;
±20% при переприеме между двумя КТМ.
Пульсация выпрямленного напряжения, из которого формируется первичный сигнал на выходе КТМ, нагруженного на приемник информации, не должна превышать 5%.
4.7. В качестве показателей работоспособности КТМ используются:
достоверность передачи информации по посылкам или комбинациям;
коэффициент готовности (показатель надежности КТМ).
Достоверность передачи информации должна выражаться через коэффициент ошибок, определяемый по формуле
,
где Пош - количество ошибочно принятых ошибок за сеанс измерений;
Ппер - количество посылок, переданных по КТМ за сеанс измерений.
Допускается оценка КТМ по достоверности передачи комбинации (заданного текста). Коэффициент ошибок по комбинациям определяется по формуле
,
где Пк.ош - количество ошибочно принятых комбинаций за сеанс измерений;
Пк.пер - количество комбинаций, переданных по КТМ за сеанс измерений.
Номинальное значение коэффициента ошибок в любом КТМ при соотношении уровня сигнала и помех, равном 20 дБ и более, должно быть не больше:
1·10-4 при передаче посылок типа 1:1;
2·10-4 при передаче комбинации "ТЕКСТ".
Переходные процессы в каналах ТМ вызывают характеристические искажения. Значение постоянной времени канала складывается из времени "раскачки" фильтров аппаратуры и постоянной времени детектора.
С учетом 25% запаса характеристические искажения в канале ТМ не должны проявляться при скорости передачи импульсов менее 37,5 Бод.
Для обеспечения определенного запаса устойчивости и получения необходимой помехозащищенности по сосредоточенным помехам (в частности, по комбинационным) требуется, чтобы допустимая разность уровней телефонного и телемеханического каналов на выходе группового тракта была 1 Нп.
5. ГРАНИЦЫ ОБСЛУЖИВАНИЯ И СИГНАЛЫ МЕЖДУ УТМ И ПЕРВИЧНЫМИ ДАТЧИКАМИ НА КОНТРОЛИРУЕМЫХ ПУНКТАХ
5.1. При обслуживании передающих аппаратов УТМ на контролируемом пункте (КП) службой СДТУ, а первичных датчиков службой РЗА граница зон обслуживания устанавливается на выводах панели телемеханики или панелей релейной защиты (по решению главного инженера предприятия).
5.2. К УТМ могут подключаться контактные и бесконтактные датчики телесигнализации. Сопротивление датчика в замкнутом состоянии должно быть не более 10 Ом при токе от 1 до 50 мА. Ток утечки бесконтактного датчика в разомкнутом состоянии должен быть не более 0,1 мА, сопротивление разомкнутого контакта - не менее 1 МОм.
5.3. Входные цепи ТИТ в большинстве современных УТМ и телекомплексов (ТК) рассчитаны на подключение датчиков со следующими выходными сигналами:
0 - 5 мА;
0 - 10 мА;
минус 5 - 0 - плюс 5 мА.
Допускается применение датчиков с выходным сигналом 0-10 В на сопротивлении 2 кОм.
5.4. Выходные цепи ТИИ рассчитаны на подключение транзисторных ключей электронных счетчиков Ф443, преобразователей оборотов в количество импульсов Е870 или аналогичных датчиков ТИИ. Допускается подключение контактных датчиков ТИИ.
5.5. Изоляция на КП проверяется для всех цепей, связанных с источником питания устройства, и общих цепей ТУ и ТС, связанных с оперативным напряжением объекта. Изоляция индивидуальных цепей ТУ и ТС, связанных с оперативным током, испытывается при проверках вторичной коммутации соответствующих присоединений.
Цепи устройств ТМ проверяются мегаомметром на 500 В, а цепи, связанные с оперативным током объекта, - мегаомметром на 2000 В.
Сопротивление изоляции цепей одного полукомплекта устройства телемеханики, включая межаппаратные кабельные связи, измеренные мегаомметром на 500 В, не должно быть менее 10 МОм, цепи питания 220 В должны иметь сопротивление изоляции не менее 20 МОм.
Индивидуальные цепи должны иметь сопротивление изоляции не менее 20 МОм на каждое присоединение.
Изоляция монтажа проверяется относительно земли, а при наличии нескольких независимых источников питания устройств ТМ - между цепями этих источников.
Необходимо обеспечить условия, обеспечивающие соединение всех подлежащих проверке цепей с шинками питания.
Изоляция линий связи (от КП или ДП) до устройств каналов телемеханики проверяется омметром: относительно земли и между жилами. Для кабельных линий - 2 МОм, для воздушных - 1 МОм.
6. ИНТЕРФЕЙСЫ МЕЖДУ ПРИЕМНЫМИ УТМ И АППАРАТУРОЙ ОБРАБОТКИ ДАННЫХ
6.1. При наличии специальных устройств согласования аппаратуры телемеханики с ЭВМ и устройствами вывода на щит сигналы согласования должны поддерживаться в соответствии с техническими характеристиками этих устройств, а границы устанавливаются в зависимости от удобства контроля сигналов и закрепления эксплуатационного обслуживания этих устройств.
В соответствии с ГОСТ 26.205-88 п.2.18.4 "Тип интерфейса и параметры сопряжения изделий (т.е. УТМ) с ЭВМ и периферийным оборудованием должны быть установлены в ТУ на изделия конкретного типа".
6.2. В современных УТМ имеются модули ввода-вывода сигналов на щит диспетчера и оборудование диспетчерского пункта. Например, в телекомплексе ГРАНИТ модули двух типов дискретных сигналов: один - для "полусветлого" и "светлого" щитов, другой - для "темного" щита. Модули рассчитаны на воспроизведение до 64 ТС по схеме "полусветлого" щита и до 32 ТС по схемам "светлого" и "темного" щитов. Каждая выходная цепь модуля управляет приборами сигнализации диспетчерского щита (сигнальными лампами, реле) при нагрузке не более 100 мА, 50 В. Предусмотрены режим мигания при изменении ТС и квитирование несоответствия сигналов, а также режим контроля исправности сигнальных ламп.
Модуль вывода аналоговых сигналов предназначен для управления до 16 указывающими (регистрирующими) приборами при токе до 5 мА и сопротивлении не более 2,4 кОм. Модуль позволяет проводить тестирование выходных цепей подачей фиксированного выходного тока, равного 2,5 мА на все выходы модуля.
6.3. Последовательный интерфейс между аппаратурой телемеханики и аппаратурой обработки данных (стандарты МЭК). Интерфейс определяет линию связи, по которой передается информация между УТМ и аппаратурой обработки данных. Аппаратура обработки обычно соединяется последовательным или параллельным цифровым интерфейсом.
В соответствии с рекомендациями Международного консультативного комитета по телеграфии и телефонии (МК КТТ) цепи связи УТМ с устройствами обработки, а также устройствами передачи данных, необходимые для передачи двоичных данных, сигналов контроля и временных сигналов, называются "цепями обмена".
Цепи обмена между аппаратурой телемеханики и указанными выше устройствами состоят из цепей определенных в рекомендациях V24.MK КТТ.
В системах телемеханики используют следующие цепи:
а) для передачи телемеханических данных:
цепь 103 - "Передаваемые данные";
цепь 102 или 102а - "Сигнальное заземление" или "Общий обратный провод";
цепь 106 - "Готовность к передаче";
цепь 105 - "Запрос передачи";
цепь 113 или 114 - "Синхронизация элементов передаваемого сигнала" (только доля синхронных систем передачи данных);
б) для приема телемеханических данных:
цепь 104 - "Принимаемые данные";
цепь 102 или 102Б - "Сигнальное заземление" или "Общий обратный провод";
цепь 107 - "АПД готова";
цепь 109 - "Детектор принимаемого линейного сигнала канала данных";
цепь 110 - "Детектор качества сигнала данных" (не обязателен. Нет необходимости, если определение качества сигнала выполняется аппаратурой телемеханики);
цепь 115 - "Синхронизация элементов принимаемого сигнала".
Могут быть использованы другие интерфейсы (например, "токовая петля").
Физические, электрические и функциональные характеристики определяются следующими основными параметрами:
число проводов (две или четыре жилы) и их характеристики;
одиночная или двойная петля для тока;
номинальный, минимальный и максимальный токи;
значение напряжения источников и их расположение;
остаточное напряжение на передатчике и приемнике;
гальваническая развязка;
скорость передачи и протокол.
6.4. Параллельный интерфейс. При высокой скорости передачи и, если аппаратура телемеханики и аппаратура обработки данных расположена близко друг к другу (на небольшом расстоянии), параллельная связь может быть эффективной.
В этом случае может быть много вариантов соединений в зависимости от возможностей процессора.
В стандарте устанавливаются электрические и функциональные характеристики:
физические соединения интерфейса;
уровень напряжения;
гальваническая развязка и расположение источника питания;
скорость передачи и протокол.
7. МЕТОДИКА И ПРОГРАММА ПРОВЕРКИ НОВЫХ ЦППС ПРИ ЗАМЕНЕ РПТ-80 НА НОВЫЕ
Программа испытаний по приемке специального программного обеспечения ЦППС
Испытания заключаются в проверке исполнения ЦППС функций телемеханики.
Испытания проводятся при условии предоставления исполнителем документации на разработанное программное обеспечение, которая включает в себя алгоритмы и блок-схемы программ, листинги программ и руководство для оператора по работе с системой.
Для проведения испытаний на ЦППС подключаются каналы связи.
7.1. Генерация и ведение базы данных
Каналы связи, заведенные на ЦППС с контрольного КП для проведения испытаний, описываются в базе данных. Тем самым проверяется работоспособность программы генерации информационной базы.
Работоспособность программ загрузки и ведения базы данных оценивается по факту использования введенных данных при выполнении последующих пунктов программы.
7.2. Программное обеспечение приемного контроллера (протокол РПТ-ТМ-512)
7.2.1. При отсутствии переключений объектов ТС или вызовов ТС от ЦППС проверяется наличие в прямом канале циклической передачи посылок ТИ, а в обратном канале контрольного сигнала "меандр" (чередование "нулей" и "единиц"). Коды ТИ, принимаемые при этом ЦППС, сравниваются со значениями ТИ, задаваемыми с помощью образцового датчика.
7.2.2. Путем замыкания соответствующих контактов контрольного КП имитируется переключение объектов ТС, что вызывает спорадическую передачу соответствующих групп ТС. Проверяется соответствие кодов ТС, принимаемых ЦППС, заданным, а также наличие в обратном канале сигнала "квитанция" о правильном приеме ТС (два байта "единиц").
7.2.3. Оператором ЦППС производится запрос всех групп ТС. Проверяется прохождение в обратном канале сигнала запроса всех групп ТС (серия "нулей" длиной 2 байта), а также формирование и передача контрольным КП всех групп ТС поочередно с посылками ТИ. Принимаемые коды ТС сравниваются с заданными.
7.2.4. Осуществляется перезапуск ЦППС. Аналогично п.7.2.3 проверяется формирование запроса на передачу всех групп ТС.
7.2.5. Скорость передачи на контрольном КП изменяется дискретно с заданным шагом. Проверяется наличие сообщения об ошибке.
7.2.6. В канал, заведенный на ЦППС с контрольного КП, включается RС-цепочка, образующая эквивалент линии связи. Изменяются характеристики сигнала путем изменения номиналов элементов RС-цепочки.
Оцениваются пределы изменения характеристик сигнала, при которых осуществляется устойчивый прием информации.
7.2.7. Разрывается основной канал связи с контрольного КП. Проверяется наличие сообщения "Обрыв канала" и изменение сигнализации о состоянии данного канала, а также наличие сообщения о переходе на резервный канал, увеличение счетчика переключений и факт приема информации с КП.
7.2.8. Информация, принимаемая ЦППС с каналов связи, сравнивается в кодовой форме с соответствующей информацией, принимаемой РПТ-80.
7.3. Обработка ТИ
7.3.1. Для одного из телеизмерений, передаваемого с контрольного КП, в базу данных ЦППС вводится признак инверсии. Вручную производится операция инверсии кода телеизмерения, передаваемого с КП. Полученный код сравнивается с соответствующим кодом в ЦППС.
7.3.2. Вводится признак зеркального переворота.
Проверяется выполнение данной операции аналогично изложенному в предыдущем пункте.
7.3.3. Имитируется единичный скачок (изменение более чем на 10%) значения ТИ. Проверяется прием ЦППС значения данного ТИ в момент скачка, а затем нормального значения.
7.3.4. Вводится признак и коэффициент фильтрации.
Имитируется изменение значения ТИ по заранее заданному закону. Вручную производится расчет фильтрованных значений в соответствии с известной формулой. Расчетные значения сравниваются с принимаемыми ЦППС.
7.3.5. Задается значение апертуры.
Проверяется неизменность значения данного телеизмерения в ЦППС при изменении передаваемого с КП значения в пределах заданной апертуры и изменение значения, принимаемого ТИ, при выходе передаваемого значения за рамки апертуры.
7.3.6. Коды телеизмерений, принимаемые РПТ-80, пересчитываются в поименованные величины в соответствии с известными масштабными коэффициентами. Расчетные значения сравниваются со значениями соответствующих измерений в ЦППС.
7.4. Обработка ТС
7.4.1. Для одной из групп ТС, передаваемой с контрольного КП, в базе данных вводится признак инверсии. Известный код ТС, передаваемый с КП, пересчитывается вручную и сравнивается с соответствующим кодом в ЦППС.
7.4.2. Вводится признак и коэффициент фильтрации. Имитируется изменение значения ТС по заранее заданному закону. Вручную производится расчет фильтрованных значений в соответствии с известной формулой.
Проверяется соответствие расчетных значений ТС значениям, принимаемым ЦППС, а также появление в соответствующий момент флага недостоверности.
7.5. Привязка комплекса ЦППС к ОИК АСДУ на базе IBM PC (в протоколе РПТ-ЭВМ)
7.5.1. Для проведения проверки функции связи ЦППС-ЭВМ организуется трехмашинный комплекс на базе двух машин ЦППС и одной ЭВМ, где ЦППС 1 работает в основном режиме, а ЦППС 2 - в резервном.
Каналы, заведенные на ЦППС с реальных объектов, отключаются. Источником поступления информации ТИ, ТС остается только контрольное КП.
7.5.2. При включении питания (перезапуске) ЦППС проверяется передача полного объема ТИ и ТС в циклическом режиме. В таблицах и мнемосхемах на ЭВМ просматривается информация, принимаемая от ЦППС, и сравнивается с исходной. После окончания передачи полного объема ТС, ТИ проверяется переход системы в адаптивный режим.
При отсутствии изменений СЛИ, ЦБИ и ТИ, ТС проверяется передача ТИ в режиме квазицикла.
7.5.3. При включении питания (перезапуске) ЭВМ проверяется переход ЦППС в циклический режим передачи информации в ответ на запрос из ЭВМ.
В соответствующих буферах просматривается информация, принимаемая от ЭВМ, и сравнивается с исходной.
7.5.4. Имитируется изменение значения какого-либо ТИ на контрольном КП.
Проверяется спорадическая передача с ЦППС данного ТИ наряду с передачей очередного ТИ по квазициклу. Принятая информация просматривается в соответствующих таблицах и мнемосхемах ЭВМ и сравнивается с исходной.
7.5.5. Имитируется переключение какого-либо объекта ТС. Производится проверка, аналогичная предыдущему пункту.
7.5.6. Из ЭВМ производится запрос на передачу полного объема информации. Проверяется передача полного объема ТИ, ТС аналогично п.7.5.2.
7.5.7. По команде оператора ЦППС в ЭВМ осуществляется передача цифро-буквенной информации. В соответствующих буферах на ЦППС и ЭВМ сравнивается принятая и переданная информация.
7.5.8. Повторяется предыдущий пункт, но на этот раз передача ЦБИ осуществляется из ЭВМ.
7.5.9. Аналогично пп.7.5.7, 7.5.8 осуществляется проверка передачи ЦБИ с заданным периодом.
7.5.10. Производится разрыв обратного канала.
Работоспособность системы проверяется по обновлению ТИ, передаваемых по квазициклу.
Восстанавливается целостность обратного канала.
7.5.11. Производится разрыв прямого канала связи ЦППС-ЭВМ.
Проверяется переход ЭВМ на работу с резервной ЦППС, о чем свидетельствует начало приема информации с ЦППС 2. Восстанавливается прямой канал связи.
7.5.12. Оператором ЭВМ задается команда перехода на работу с резервной ЦППС. Проверяется передача информации от ЦППС 2.