РД 34.35.309
УДК 621.311.21(083.96)
МИНИСТЕРСТВО ЭНЕРГЕТИКИ И ЭЛЕКТРИФИКАЦИИ СССР
ГЛАВНОЕ НАУЧНО-ТЕХНИЧЕСКОЕ УПРАВЛЕНИЕ
ЭНЕРГЕТИКИ И ЭЛЕКТРИФИКАЦИИ
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
ПО ИСПЫТАНИЯМ И НАЛАДКЕ КТС ГРАМ ГЭС
МУ 34-175-87
РД 34.35.309
Срок действия установлен
с 01.01.88 г.
до 01.01.98 г.
РАЗРАБОТАНО Производственным объединением по наладке, совершенствованию технологии и эксплуатации электростанций и сетей "Союзтехэнерго"
ИСПОЛНИТЕЛИ Г.С. Кисилев, Е.Ф. Левков, А.А. Пимбургский, М.Я. Руденский, Г.И. Шибаев (цех гидроэлектростанций)
УТВЕРЖДЕНО Главным научно-техническим управлением энергетики и электрификации СССР 08.07.87 г.
Заместитель начальника А.П. Берсенев
Методические указания по испытаниям и наладке системы ГРАМ содержат технические требования к этим системам и определяют общий объем и методы проведения испытаний и наладки с целью проверки соответствия систем этим требованиям.
Методические указания предназначаются для персонала организаций, занимающихся наладкой и эксплуатацией систем ГРАМ на строящихся и эксплуатируемых гидроэлектростанциях, а также на ГЭС, где проводится модернизация этой системы.
Настоящие Методические указания являются расширенным и дополнительным изданием "Программы и методом испытаний систем ГРАМ гидроэлектростанций" (М.: СЦНТИ ОРГРЭС, 1975), в котором содержатся новые разделы по наладке центрального регулятора и агрегатных следящих устройств.
1. ПЕРЕЧЕНЬ ПРИНЯТЫХ СОКРАЩЕНИЙ
САР - система автоматического регулирования,
РЧВ - регулятор частоты вращения,
ЭГР - электрогидравлический РЧВ,
ЭГРК - то же с комбинатором,
НА - направляющий аппарат,
МИЧ (МИЧВ) - механизм изменения частоты (механизм изменения частоты вращения),
ОС - обратная связь,
ЖОС - жесткая обратная связь,
ИОС - изодромная обратная связь,
ГОС - гибкая обратная связь,
ЧЧЭ - частоточувствительный элемент,
ПЗ - побудительный золотник,
ГЗ - главный золотник,
ЭГП - электрогидравлический преобразователь,
КТС ГРАМ ГЭС - комплекс технических средств группового регулирования активной мощности гидроэлектростанции,
ЦР - центральный регулятор,
БПМ - блок питания микросхем,
БПР - блок питания реле,
ЗМ - задатчик мощности,
ИЧ - измеритель частоты,
МГА - модель гидроагрегата,
БДЗ - блок дискретного задания,
РМ5 (СЭМ) - сумматор заданной мощности,
РМ6 (СФМ) - сумматор фактической мощности,
РМ7 (УД) - управляемый делитель,
РМ4 (ПС) - промежуточный сумматор,
РМ3 (КН) - компаратор напряжения,
РМ8 (БР) - блок реле,
РМ2 (ОПР) - ограничитель пределов регулирования,
РМ1 (ПУИ) - пропорциональный усилитель и интегратор,
УСЗ - устройство следящее запоминающее,
ЦПУ - центральный пульт управления,
ГТЧ - генератор технической (промышленной) частоты,
ЦУУ - центральное управляющее устройство.
2.1. Приемно-сдаточные испытания
2.1.1. Испытания проводятся после монтажа и наладки системы ГРАМ перед включением ее в эксплуатацию с целью проверки соответствия техническим требованиям.
2.1.2. Объем этих испытаний должен быть наиболее полным, так как данные испытаний используются при эксплуатации системы и для контроля результатов при других видах испытаний. Объем испытаний определен типовой программой испытаний системы КТС ГРАМ ГЭС.
2.2. Эксплуатационные сокращения испытания
2.2.1. Испытания проводятся в период эксплуатации системы по сокращенной программе. Целью этих испытаний является проверка работоспособности системы и сохранение ее основных качеств в период эксплуатации. Периодичность испытаний – 1-2 года.
2.2.2. В объем испытаний входит проверка действия центрального регулятора на модели гидроагрегата (блок МГА), точность распределения нагрузки между гидроагрегатами, проверка действия схемы автоматики и защиты.
2.3. Периодические испытания
2.3.1. Испытания проводятся с целью контроля качества системы, определения необходимости наладки или возможности дальнейшей ее эксплуатации, а также при выявлении замечаний к работе системы при эксплуатационных испытаниях. Необходимость проведения периодических испытаний может возникнуть при изменении характеристик объекта регулирования или требований к системе ГРАМ в связи с изменением режима работы агрегатов или ГЭС.
2.3.2. Объем испытаний может быть различным в зависимости от цели испытаний и должен производиться в период капитальных ремонтов основного оборудования.
3. ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К СИСТЕМАМ ГРАМ
3.1. Назначение, состав
3.1.1. Система ГРАМ гидроэлектростанций предназначена для автоматического регулирования мощности ГЭС по сигналам задания, поступающим со станционного и вышестоящего уровней управления, а также формируемым в самой системе по отклонению частоты с соблюдением заданного распределения нагрузки между агрегатами.
3.1.2. Система ГРАМ состоит из центрального управляющего устройства, формирующего закон регулирования, устройства распределения нагрузки, исполнительных устройств на каждом гидроагрегате и устройств автоматики, защиты и сигнализации.
Статические и динамические свойства системы ГРАМ должны определяться настройками центрального управляющего устройства (ЦУУ).
3.2. Режимы работы
3.2.1. Система ГРАМ должна обеспечивать следующие режимы автоматического регулирования:
поддержание заданного режима по выходному сигналу центрального регулятора или по активной мощности со статизмом по частоте с отработкой задания по фактической суммарной мощности агрегатов;
поддержание заданного уровня частоты в энергосистеме по статической или астатической характеристике.
3.2.2. Система ГРАМ должна обеспечивать возможность распределения нагрузки гидроагрегатами с учетом индивидуальных ограничений по максимальной мощности и зонам нежелательной работы по одному из следующих способов:
равенству мощностей или открытий направляющих аппаратов при идентичности энергетических характеристик агрегатов;
минимуму суммарных потерь, обеспечивающему повышение КПД ГЭС за счет оптимизации распределения не менее 0,1% при различии между энергетическими характеристиками агрегатов.
3.2.3. Система ГРАМ должна обеспечивать поддержание неизменной суммарной мощности ГЭС после ручного и автоматического подключения (отключения) работающего под нагрузкой агрегата к системе ГРАМ (от системы ГРАМ), при пуске (останове), выводе (вводе) агрегата из режима (в режим) синхронного компенсатора.
3.2.4. Система ГРАМ должна обеспечивать автоматическое ограничение суммарной максимальной и минимальной мощности ГЭС.
3.2.5. При делении ГЭС на части должно обеспечиваться групповое регулирование мощности в каждой из разделившихся частей или в одной из них в соответствии с требованиями энергосистемы. Должна также предусматриваться возможность автоматического регулирования или ограничения перетока мощности между двумя секциями ГЭС (через трансформатор связи).
3.2.6. При возникновении аварийного режима в энергосистеме система ГРАМ должна способствовать устранению этого режима.
В случае аварийного снижения частоты в энергосистеме ниже заданной установки система ГРАМ должна обеспечивать максимально возможную (по условию гидроудара) скорость набора нагрузки, при этом должен соблюдаться приоритет действия сигналов ограничений от перегрузок по ВЛ, если эти сигналы исключают набор нагрузки.
3.2.7. Система ГРАМ должна адаптироваться к условиям регулирования частоты, обеспечивая при работе ГЭС в энергосистеме эффективное воздействие на колебание частоты с периодом 8÷10 мин и больше, а при работе ГЭС в изолированном энергорайоне - регулирование частоты с погрешностью ±0,1 Гц относительно заданной уставки.
3.2.8. При аварийном отключении агрегатов от устройств противоаварийной автоматики задание мощности должно автоматически уменьшаться на значение мощности отключенных агрегатов. При частотном пуске агрегатов в генераторный режим задание мощности должно автоматически увеличиваться на сумму мощностей пускаемых агрегатов.
3.3. Статические свойства
3.3.1. Разрешающая способность частоточувствительного элемента системы ГРАМ должна быть не ниже 0,01 ГЦ; характеристика линейная с насыщением; зона линейности должна быть в диапазоне 45-55 Гц, а отклонение от линейного закона не должно превышать 1% по частоте от диапазона линейности.
3.3.2. Погрешность отработки задания по суммарной мощности не должна превышать погрешности измерительных преобразователей мощности более чем на 1%.
3.3.3. Должно быть обеспечено ступенчатое с интервалом в 1% изменение уставок статизма регулирования частоты в пределах 0-10% с погрешностью не более ±5% установленного статизма.
Зона линейности статической характеристики по частоте должна быть не менее 3% (±1,5 Гц).
3.3.4. Статизм по частоте, отнесенный к одному агрегату, не должен зависеть от изменения числа включенных в схему ГРАМ гидроагрегатов с погрешностью не более ±5% максимального значения.
3.3.5. Погрешность ограничения мощности ГЭС не должна превышать погрешности измерительных преобразователей мощности более чем на 2%.
3.3.6. Система ГРАМ должна обеспечивать плавное или ступенчатое изменение установки по частоте от 49 до 51 Гц с погрешностью не более ±0,1%.
3.3.7. Заданная мощность не должна изменяться более чем на 2% номинального значения при уставке статизма 3% при изменении:
температуры окружающей среды от +10 до +40 °С,
напряжения собственных нужд от +10 до -15%.
3.3.8. Неточность распределения нагрузки между агрегатами, не исчерпавшими регулировочного диапазона, приведенная к значению открытия направляющего аппарата, не должна превышать 2% номинального открытия.
3.3.9. Групповой регулятор должен иметь регулируемую зону нечувствительности по частоте с раздельным регулированием ее нижних и верхних пределов с плавным или ступенчатым изменением уставок зоны в диапазоне ±1 Гц с точностью 0,01 Гц.
3.4. Динамические свойства
3.4.1. Система ГРАМ должна обеспечивать пропорционально-интегральный закон управления мощностью со следующими пределами изменения настроечных параметров:
коэффициент передачи 0,5÷20,0 отн. ед.;
постоянная времени интегрирования 0,1÷40 с.
3.4.2. Должно обеспечиваться независимое изменение параметров динамической настройки системы ГРАМ. При ступенчатом изменении параметров динамической настройки число ступеней должно быть не менее десяти.
3.4.3. При изменении числа работающих агрегатов коэффициент передачи разомкнутой системы регулирования мощности должен поддерживаться неизменным с точностью ±10% установленного значения в линейной зоне элементов системы.
3.4.4. Система ГРАМ должна обеспечивать отработку сигналов задания мощности по апериодической характеристике с постоянной времени в пределах 10÷40 с. Допускается одно перерегулирование с амплитудой не более 5% значения сигнала.
3.4.5. Центральный регулятор системы ГРАМ не должен вносить запаздываний в тракты регулирования частоты и активной мощности более чем 0,1 с.
3.4.6. Система ГРАМ не должна ограничивать время набора полной мощности, обусловленное временем открытия направляющего аппарата турбины и временем перемещения лопастей рабочего колеса.
3.4.7. Скорость изменения мощности агрегата, подключаемого к системе ГРАМ, должна устанавливаться меньше максимальной скорости регулирования мощности, при этом суммарная фактическая мощность ГЭС в процессе перевода какого-либо агрегата на групповое регулирование не должна изменяться более чем на ±2%.
3.4.8. Время отработки системой ГРАМ задания мощности при максимальной скорости его изменения, определяемой устройствами системного регулирования, не должно превышать более чем на 20% время его отработки гидромеханической следящей системой регулятора гидротурбины.
3.5. Автоматика, защита и сигнализация
3.5.1. Устройство управления системы ГРАМ должно выполняться таким образом, чтобы обеспечивалась:
увязка с технологической автоматикой гидроагрегата при пуске, остановке, переводе в режим СК, аварийных отключениях со схемой частотного пуска и противоаварийной автоматики ГЭС;
автоматическое переключение уставок стабилизирующих устройств для двух режимов работы;
автоматическое изменение структуры центрального регулятора при изменении режима работы ГЭС (регулирование частоты, мощности);
автоматическое переключение статизма для двух режимов работы.
3.5.2. Система ГРАМ должна быть оснащена защитами и блокировками, исключающими неправильные действия системы при изменении схемы коммутации и возникновении аварийной ситуации на станции, а также при внутренних повреждениях в схеме и аппаратуре ГРАМ. В частности, должны быть предусмотрены защиты, предотвращающие:
неправильные действия системы при разделении ГЭС на части;
неправильные действия системы ГРАМ при исчезновении питающих напряжений или снижении их ниже 15% номинального значения;
изменение нагрузки при исчезновении входных сигналов задания мощности и обратной связи.
3.5.3. Неисправность одного из агрегатных устройств или действие индивидуальных ограничений не должны вызывать неправильные действия других агрегатных устройств и системы ГРАМ в целом и не должны нарушать заданного распределения нагрузки.
3.5.4. Система ГРАМ должна формировать и выдавать следующую информацию:
значения регулировочных диапазонов на увеличение и уменьшение мощности ГЭС (или заданные предельные максимальные и минимальные мощности ГЭС);
релейные сигналы исчерпания регулировочных диапазонов раздельно на увеличение и уменьшение мощности ГЭС;
сигналы состояния ГРАМ ГЭС (включен, готов к включению, не готов к включению, сблокирован);
фактическую суммарную мощность;
суммарное задание мощности ГЭС;
задание внеплановой мощности ГЭС.
3.5.5. Групповой регулятор должен иметь основное и резервное питание (от аккумуляторной батареи). Переход с одного питания на другое должен происходить без толчков и изменений выходного сигнала группового регулятора.
3.5.6. При ступенчатом изменении выходного сигнала (регулируемая ступень 20÷50%) групповой регулятор должен автоматически выводиться из работы.
3.6. Конструкция
3.6.1. Система ГРАМ должна иметь не менее шести независимых входов на постоянном токе в соответствии с Государственной системой приборов (ГСП), в том числе от применяемых на ГЭС аналоговых устройств системного регулирования: задатчика внеплановой мощности ЗВН, автоматического задатчика графика нагрузки АЗГН, регулятора по водотоку, если они не реализованы в составе системы ГРАМ.
3.6.2. Изменение уставок стабилизирующих устройств системы ГРАМ должно быть централизовано.
3.6.3. Система ГРАМ должна иметь дистанционное и местное управление задатчиком мощности.
3.6.4. В системе должна быть предусмотрена возможность изменения пределов ограничения регулировочного диапазона ГЭС.
3.6.5. В составе системы ГРАМ (для проведения наладочных работ) должна быть предусмотрена упрощенная модель объекта регулирования и устройство ступенчатого задания входного сигнала по мощности.
3.6.6.Уставки параметров статической и динамической настройки, а также изменения режимов должны обеспечиваться не стираемой памятью. Уход заданных значений указанных уставок за 5 лет эксплуатации не должен превышать 0,1% их диапазонов.
3.6.7. Система ГРАМ должна иметь по пять ступеней на разгрузку и загрузку (по 20% суммарной мощности ГЭС) по сигналам противоаварийной автоматики.
3.6.8. Устройство ЦУУ должно иметь выход на постоянном токе в соответствии с ГСП в диапазоне от -10 до +10 В с нагрузкой 2 кОм для согласования с исполнительными устройствами гидроагрегатов.
3.6.9. Устройство должно содержать рабочий (основной) и резервный (дублирующий) регуляторы, объединенные общей технологической схемой с переходом на резервный при неисправностях и выходах в ремонт рабочего регулятора. Каждое из ЦУУ должно быть рассчитано на подключение 24 агрегатов.
3.6.10. Система ГРАМ должна обеспечивать безотказную работу при существующих на гидроэлектростанциях уровнях помех в нормальных и аварийных режимах.
4. ПОДГОТОВКА К ИСПЫТАНИЯМ И НАЛАДКЕ УСЛОВИЙ
ПРОВЕДЕНИЯ ИСПЫТАНИЙ
4.1. Указания мер безопасности
4.1.1. При наладке и испытаниях системы ГРАМ необходимо руководствоваться требованиями действующих "Правил техники безопасности при эксплуатации электроустановок", "Правил использования и испытания защитных средств, применяемых в электроустановках" и "Правил технической эксплуатации электрических станций и сетей".
При наладке необходимо также пользоваться требованиями действующих "Правил техники безопасности при электромонтажных и наладочных работах".
4.1.2. Не допускается проведение работ по испытанию и наладке системы ГРАМ лицами, не знакомыми с действием узлов и всей системы регулирования и не имеющими допуска к работе с ней.
4.1.3. Для предотвращения несчастных случаев при проведении работ следует вывешивать предупредительные плакаты около органов управления и вблизи подвижных частей системы регулирования.
4.1.3. Пайки соединений в электрической схеме следует производить при снятом напряжении паяльником соответствующей мощности, включенным через разделительный трансформатор (с заземленным жалом при работе с микросхемами).
4.2. Ознакомление со схемой
4.2.1. Испытаниям системы группового регулирования активной мощности должно предшествовать ознакомление с ее принципиальной схемой, конструкцией, входящей в нее аппаратуры, типами применяемых элементов и расположением аппаратуры на объекте, что необходимо для проверки соответствия системы ГРАМ предъявляемым к ней техническим требованиям.
4.2.2. Необходимо четко представлять, какие нормальные и аварийные эксплуатационные режимы работы ГЭС обеспечиваются системой ГРАМ. Основным, как правило, является режим регулирования мощности со статизмом по частоте или режим обеспечения перетоков обменной мощности по ВЛ. При ознакомлении со схемой обеспечения указанного режима работы следует знать, по какому параметру проводится отработка сигнала задания - по среднему открытию направляющих аппаратов турбин, когда главная обратная связь осуществляется по выходу центрального регулятора, или по суммарной фактической мощности, когда главная обратная связь формируется по суммарной фактической активной мощности агрегатов ГЭС.
Другим возможным режимом работы ГЭС является режим астатического регулирования частоты. Следует выяснить, является он нормальным или аварийным, обеспечивается ли он системой ГРАМ или агрегаты ГЭС при этом автоматически переводятся на индивидуальный РЧВ.
При возможности разделения ГЭС на несинхронные части следует выяснить, что предусматривается системой для обеспечения указанного режима: автоматическое групповое регулирование частоты и мощности каждой из разделившихся частей своим центральным регулятором (если они оба установлены на ГЭС) или же регулирование в одной из частей с помощью ЦР, а в другой - с помощью РЧВ турбин, работающих на индивидуальном управлении.
4.2.3. При ознакомлении с системой ГРАМ необходимо знать способ распределения нагрузки между агрегатами. Наиболее распространенным является способ распределения активной нагрузки между гидроагрегатами по равенству открытий направляющих аппаратов, тем не менее часто применяется более удобный для эксплуатационного персонала способ распределения нагрузки по равенству мощностей работающих агрегатов, хотя этот способ ухудшает динамические качества системы ГРАМ.
4.2.4. Порядок и последовательность операций при управлении системой ГРАМ определяется инструкцией по эксплуатации. Поэтому перед проведением испытаний должна быть составлена или изучена действующая инструкция по эксплуатации системы ГРАМ.
4.3. Общий порядок проведения испытаний
4.3.1. На основании "Положения о порядке разработки, согласования и утверждения программ испытаний на тепловых, гидравлических и атомных электростанциях в энергосистемах, тепловых и электрических сетях" (М.: СПО Союзтехэнерго, 1986) должна быть составлена общая программа испытаний. На основании этой программы составляется рабочая программа, где конкретно указываются производимые переключения в электрической схеме первичных цепей, в электрической и гидравлической схемах системы регулирования.
4.3.2. Должны быть назначены лица, ответственные за проведение испытаний. Руководители испытаний являются ответственными за весь персонал, участвующий в испытаниях, за правильность измерений, расчетов и подготовку окончательного отчета. По любому вопросу, касающемуся объема испытаний или порядка их выполнения, его решение является окончательным.
4.3.3. Все чертежи для производства опытов и необходимые данные, документы, спецификации, паспорта, отчеты должны быть предоставлены в распоряжение персонала, проводящего испытания.
4.3.4. На работы, связанные с изменением режима работы агрегата или выводом оборудования из работы должны быть своевременно в установленном порядке поданы заявки в диспетчерские, объединенные диспетчерские или центральные диспетчерские управления.
4.3.5. Сопротивление изоляции электрооборудования относительно корпуса на рядах зажимов присоединения (напряжения постоянного и переменного тока) должно проверяться мегаомметром на 1000-2500 В, а на остальных зажимах – мегаомметром на 500 В. Сопротивление изоляции должно быть не менее указанного в заводской технической документации. Для проверки изоляции электрических цепей субблоков следует пользоваться специальным разъемом, представляющим собой розетку, все выводы которой со стороны подключения жгута закорочены.
При проведении испытаний должна быть организована надежная двусторонняя связь между ЦПУ, где установлена аппаратура ГРАМ, и индивидуальными РЧВ.
4.4. Типовая программа испытаний
4.4.1. В программу входят:
проверка правильности функционирования системы,
определение статических свойств системы,
определение динамических свойств системы,
проверка действия защит и автоматики.
4.4.2. Для определения статических свойств системы необходимо:
определить мертвую зону системы регулирования по частоте и мощности;
определить величину статизма агрегата и гидроэлектростанции по частоте;
снять характеристики распределения нагрузки между агрегатами и определить точность ее распределения;
проверить влияние значения питающего напряжения на стабильность системы.
4.4.3. Для определения динамических свойств системы необходимо:
определить зависимость качества переходного процесса регулирования мощности от изменения динамической настройки системы;
определить влияние качества работающих агрегатов, диапазона регулирования мощности, изменений напора и динамической настройки регуляторов частоты вращения турбин на качество переходного процесса регулирования мощности;
определить запаздывания в прямом тракте системы - в общестанционном устройстве, в агрегатном устройстве и объекте регулирования;
определить качество регулирования частоты в выделенном энергорайоне при различных параметрах динамической настройки системы;
проверить действие системы регулирования при пуске и останове агрегата, при переводе (вводе) его в режим синхронного компенсатора;
проверить действие системы при аварийном снижении частоты.
4.4.4. Для проверки действия устройств защиты и автоматики необходимо:
проверить действие схемы ограничения мощности;
проверить действие устройств автоматического формирования секций ГРАМ при несинхронном делении ГЭС;
проверить действие защит от исчезновения и последующего восстановления напряжения питания; исчезновения сигналов задания и обратной связи; внутренних повреждений в аппаратуре системы.
5.1. Проверка правильности функционирования системы
5.1.1. Испытания проводятся с целью определения неисправности системы и возможности проведения ее последующих испытаний для определения статических и динамических свойств, правильности действия устройств защиты и автоматики. Проверка правильности функционирования системы ГРАМ производится без воздействия на агрегатные следящие устройства при имитации действия защит системы ГРАМ и автоматики режимов работы.
5.1.2. Испытания следует начинать с проверки действия центрального регулятора системы в режиме задания мощности (приложение 2). Для проведения испытаний на систему ГРАМ должно быть подано напряжение питания постоянным и переменным током, а реле защиты деблокировано.
Проверка правильности действия центрального регулятора от задатчика мощности в замкнутой системе производится через модель гидроагрегата при воздействии:
на кнопки "больше", "меньше" датчика мощности при разных уставках Кп и Ти (на блоке РМ1);
на корректор частоты в сторону снижения и повышения уставки частоты (на панели блока ИЧ);
на переключатель статизма (bр) в сторону уменьшения и увеличения уставки (на лицевой панели блока РЧ);
на рукоятки ограничителей "сверху" и "снизу" на лицевой панели блока РМ2.
5.1.3. При увеличении Ти и уменьшении Кп время отработки заданного сигнала должно увеличиваться, а при уменьшении Ти и увеличении Кп - уменьшаться. Возможно появление колебательного характера переходного процесса при уменьшении Ти и увеличении Кп.
При уменьшении уставки частоты выходной сигнал ЦР должен уменьшаться, а при увеличении - увеличиваться.
При уменьшении статизма выходной сигнал ЦР должен увеличиваться, а при увеличении - уменьшаться. На минимальной уставке статизма изменения частоты в сети должны вызывать изменение выхода ЦР в сторону "больше" при уменьшении частоты и в строну уменьшения при увеличении частоты.
После проведения указанных выше проверок все рукоятки вернуть в исходное положение.
5.1.4. Проверка работы схемы автоматики при включении в режим "системного регулирования" должна производиться при установке ключа режимов в положение "системное регулирование". При этом к ЦР должен подключиться вход от аппаратуры системного регулирования и выход регулятора изменяться в соответствии с изменением системного параметра.
При наличии схемы автоматического включения мертвой зоны по частоте изменение уставки частоты корректором в диапазоне мертвой зоны не должно влиять на выход центрального регулятора и изменять его за пределами мертвой зоны.
5.1.5. Проверка правильности действия системы на агрегатные следящие устройства (РЧВ) должна производиться при подключенных к ЦР датчиках мощности агрегатов (блок МГА отключен). Для испытаний РЧВ испытуемого агрегата перевести на ручное управление, МИМ (МИЧ или МИЧВ) отвести на "прибавить". Из стойки центрального регулятора изъять блок ИЧ. Агрегатный ключ подключения к ГРАМ поставить в положение "подгонка". При этом выход блока ЗМ должен соответствовать суммарной фактической мощности ГЭС, а выход ЦР открытию (или мощности) подключаемого агрегата (для проверки этого соответствия рекомендуется изменять мощность испытуемого агрегата на 10-20%). Стрелка балансового прибора РЧВ должна быть отклонена в сторону "на прибавить".
При установке агрегатного ключа в положение "групповое" стрелка балансового прибора РЧВ должна установиться на "0" и не отклоняться при воздействии на ключ управления МИМ (МИЧ). При увеличении выхода ЦР стрелка балансового прибора должна отклоняться на "прибавить", а при уменьшении - на "убавить". Ограничителями "сверху" или "снизу" на РМ2 установить выход ЦР, при котором стрелка балансового прибора устанавливается на "0" и по истечении 10-20 с перевести агрегатный ключ в положение "отключено". При удовлетворительном слежении МИМ (МИЧ) за открытием НА при работе агрегата в ГРАМ стрелка балансового прибора не должна отклониться от "0" более чем на ±0,25 деления шкалы. Проверку правильности действия системы на агрегатные следящие устройства следует провести на всех гидроагрегатах ГЭС.
5.1.6. Проверку правильности действия автоматики при делении ГЭС на несинхронные части необходимо производить при включенных в положение "групповое" агрегатных ключах двух РЧВ агрегатов, принадлежащих различным частям делящейся ГЭС (РЧВ на ручном управлении). Производится имитация работы реле выявления деления ГЭС на несинхронные части. Правильность действия системы проверяется следующим образом. При действии на кнопки "больше", "меньше" ЗМ стрелка балансового прибора РЧВ, принадлежащего секции, оставшейся в ГРАМ, должна отклоняться от "0" в соответствии с изменением выходы ЦР, и не отклоняться - при воздействии на ключ управления МИМ (МИО). Обратная реакция должна быть на балансном приборе РЧВ агрегата, оставшегося в отключенной ГРАМ секции.
5.1.7. Проверку правильности действия автоматики и системы ГРАМ в режиме астатического регулирования частоты необходимо производить при отключенных агрегатных ключах. На вход ИЧ (выходной ряд зажимов ХТ:141; ХТ:143) включить генератор промышленной частоты и установить на его выходе 50 Гц. Корректор частоты установить на 50. Ключ режимов поставить в положение "астатическое регулирование частоты" или имитировать работу реле, переводящего систему в этот режим. При этом ЗМ должен перейти в слежение за фактической мощностью ГЭС и не управляться от кнопок "больше", "меньше". При повышении частоты на выходе ГТЧ выходной сигнал ЦР должен уменьшаться и увеличиваться при уменьшении частоты. Указанная проверка может быть проведена без отключения ИЧ от измерительного трансформатора напряжения (без ГТЧ) по естественному изменению частоты следует установить в положение, когда на выходе ИЧ и РЧ устанавливается ноль напряжения, после чего переключать ключ режимов.
5.1.8. Проверку действия "подгонки" производить следующим образом:
агрегатный ключ, имеющий три положения "ГРАМ - подгонка - откл." поставить в положение "откл.";
с помощью ЗМ кнопками "больше", "меньше" внести разбаланс в значения сигналов задаваемой и фактической мощности (проследить по прибору, включенному на выход УД (РМ7). На выходе ЦР при этом может быть произвольное значение выходного сигнала;
работающий в сети испытуемый агрегат перевести на ручное управление;
агрегатный ключ поставить в положение "подгонка", при этом:
выходной сигнал ЦР должен установиться равным открытию подключаемого агрегата;
сигнал задаваемой мощности должен уравняться с сигналом фактической мощности и на выходе УД установиться напряжение, равное 0;
перевести агрегатный ключ в положение ГРАМ. На балансном приборе РЧВ стрелка не должна отклоняться от нуля.
Указанная проверка правильности функционирования системы должна производиться в зависимости от конкретных особенностей выполнения схемы автоматики и в соответствии с общими инструкциями по проверке схем автоматики и защит.
5.2. Определение статических свойств системы
5.2.1. Определение мертвой зоны системы ГРАМ по частоте и мощности, а также значения статизма производить при включенных в ГРАМ одном или нескольких агрегатах и работе системы в режиме задания мощности. При наличии блока регулируемой мертвой зоны она должна быть введена. Вход ИЧ (зажимы ХТ:141 - ХТ:143) отключается от измерительного трансформатора напряжения, а на эти зажимы включается выход ГТЧ с уставкой 50 Гц. Корректор частоты на блоке ИЧ устанавливается на отметку "50". Переключатель статизма на блоке РЧ - в положение "10". Выходной сигнал ИЧ и РЧ при этом должен быть равен нулю. С помощью ЗМ нагрузка на испытуемых агрегатах устанавливается 50% номинальной. Затем выход ГТЧ изменяется ступенями по 0,1-0,2 Гц в сторону уменьшения частоты до полной нагрузки агрегатов и в сторону увеличения частоты до полной разгрузки. На каждой ступени производятся измерения:
частоты на выходе ГТЧ;
напряжения на выходе ИЧ, РЧ, РМ1, РМ6, РМ7.
Испытания повторяются при измененных уставках статизма.
Коэффициент передачи ИЧ определяется по зависимости напряжения на выходе ИЧ от частоты.
Мертвая зона по частоте (if) определяется по зависимости напряжения на выходе (РЧ) от частоты (для прямого и обратного хода).
Статизм (bp) рассчитывается по параметрам, определяемым по зависимости напряжения на выходе РМ6 от частоты для различных уставок переключателя статизма:
,
где bp - статизм, %;
Δt - приращение частоты, Гц;
ΔUPM6 - приращение напряжения на выходе блока РМ6, соответствующее по характеристике приращению частоты, В.
Неопределенность (jpf) по мощности при регулировании частоты определяется по зависимости напряжения на выходе РМ7 от напряжения РМ1.
Неточность (ipf) как сумма мертвой зоны и неопределенности, приведенная к суммарной фактической мощности, рассчитывается по выражению:
,
где ipf - неточность системы ГРАМ по мощности при регулировании частоты, %;
jpf - неопределенность системы ГРАМ при регулировании частоты, В;
bp - статизм, %;
if - мертвая зона по частоте, Гц.
Мертвая зона по мощности определяется при работе системы ГРАМ в режиме задания мощности с различным числом включенных в ГРАМ агрегатов. При проведении испытаний следует изъять блок ИЧ из стойки ЦР. Мощность испытуемых агрегатов воздействием на ЗМ изменять ступенями через 1 B на выходе ЗМ в прямом и обратном направлении. На каждой ступени следует произвести измерения напряжений на выходе РМ5, РМ6, РМ1.
Мертвая зона по мощности (ip) определяется по графически построенной зависимости напряжения на выходе РМ6 от напряжения на выходе РМ5. Неопределенность (jpp) при регулировании мощности определяется по зависимости напряжения на выходе РМ6 от напряжения на выходе РМ1. Неточность системы ГРАМ по мощности (jpp) определяется как сумма неопределенности и мертвой зоны по формуле:
ipp = (jpp + jp)10,
где ipp - неточность системы ГРАМ по каналу регулирования мощности, %;
jpp - неопределенность (мертвая зона в обратной связи), В;
ip - мертвая зона по мощности, В.
5.2.2. Определение неточности распределения нагрузки между агрегатами.
Для определения неточности распределения нагрузки между агрегатами систему ГРАМ следует отключить от устройств системного регулирования, а отключением ИЧ исключить действие сигнала отклонения системы.
С помощью задатчика мощности ЦР, либо с помощью устройства "Ограничение сверху" произвести (ступенями по 10-15%) изменение мощности ГЭС сначала в одну, а затем в другую сторону. При установившемся значении задаваемой мощности на всех гидроагрегатах измерить величину хода сервомотора НА или мощность (в зависимости от того, по какому из этих параметров производится распределение нагрузки).
Ход сервомотора измеряется по шкале с нанесенными на нее миллиметровыми делениями, мощность - ваттметром класса 0,5 или миллиамперметром класса 0,5 по току датчика мощности.
По результатам измерений построить зависимость изменения хода сервомотора НА или мощности от положения задатчика мощности при прямом и обратном ходе. По разности положений кривых прямого и обратного хода оценивается неточность схемы задания нагрузки для каждого агрегата.
По максимальной разности положений кривых распределения нагрузки для разных агрегатов оценить расхождение между мощностями (при открытии НА) различных агрегатов. Неточность распределения нагрузки должна быть отнесена к максимальному значению того параметра, по которому производится распределение (по открытию направляющих аппаратов, по мощности).
Правильность и точность работы следящей системы МИМ (МИЧ) агрегатного устройства РЧВ определяется при поочередном отключении их от ГРАМ по изменению открытия НА и мощности.
5.2.3.Проверка влияния значения питающего напряжения на стабильность системы.
Проверку проводить при установленном значении статизма и работе системы ГРАМ в режиме ручного задания мощности. При неизменном сигнале задания и отключенном измерителе частоты ЦР изменить значение напряжения питания в пределах от плюс 10 до минус 20% номинального значения. При каждом значении установленного напряжения по ваттметру определяется мощность ГЭС. Цикл измерений проводится при трех значениях заданной мощности: минимальном, максимальном и среднем.
Аналогичные измерения провести и при включенном ИЧ, при этом для уменьшения случайных ошибок, вызванных изменениями частоты, цикл измерений повторить до трех раз.
5.3. Определение динамических свойств системы
5.3.1. Определение быстродействия системы ГРАМ при отработке заданной мощности.
Испытания должны проводиться в замкнутой системе регулирования, работающей в режиме ручного задания мощности. Для исключения влияния отклонений частоты на мощность ГЭС необходимо изъять ИЧ из стойки ЦР. Сигнал изменения задания мощности должен подаваться таким образом, чтобы гарантировать одинаковую величину задания во всех опытах.
Осциллографируется не менее трех величин: входной сигнал, открытие направляющего аппарата одного из работающих агрегатов и мощность ГЭС. Запись производится многоканальным самопишущим прибором или осциллографом. Каждый опыт проводится при действии сигнала задания мощности в сторону ее увеличения и уменьшения.
Испытания проводятся прежде всего для исследования влияния изменений динамических настроек системы ГРАМ на качество процесса регулирования мощности. Диапазон изменения мощности (около 10% максимальной мощности работающих агрегатов) рекомендуется выбирать на линейной части зависимости мощности агрегата от открытия направляющего аппарата ближе к максимальной мощности агрегата. Испытания следует начинать при настройках, соответствующих минимальному быстродействию системы ГРАМ, и затем постепенно увеличивать быстродействие до получения колебательного процесса регулирования.
5.3.2. Необходимо проверить влияние следующих факторов на качество переходного процесса:
изменение числа работающих агрегатов;
нелинейность зависимости мощности агрегата от открытия направляющего аппарата;
изменение динамической настройки РЧВ;
значения входного сигнала.
5.3.3. Проверку влияния числа работающих агрегатов производить при неизменном диапазоне изменения мощности для каждого из агрегатов для трех значений параметров динамической настройки центрального регулятора системы ГРАМ, соответствующих максимальному, минимальному и среднему быстродействию системы регулирования.
5.3.4. Проверку влияния нелинейности зависимости мощности от открытия направляющего аппарата на качество переходного процесса производить при неизменном числе работающих агрегатов для трех указанных выше значений параметров динамической настройки системы ГРАМ. При проведении опытов с помощью задатчика мощности следует последовательно устанавливать три начальных значения мощности агрегата: максимальное, минимальное и среднее.
5.3.5. Проверку влияния изменения динамических настроек изодрома РЧВ гидротурбины следует производить при неизменном диапазоне изменения мощности агрегата и одном и том же числе работающих агрегатов для трех значений параметров динамической настройки системы ГРАМ. Проверка производится при установленных, минимальных и максимальных уставках изодрома РЧВ.
5.3.6. Влияние величины задания мощности на переходный процесс необходимо проверять при тех же трех значениях быстродействия системы ГРАМ. Диапазон изменения мощности должен соответствовать линейному участку зависимости мощности агрегата от открытия направляющего аппарата. Опыты проводятся при трех значениях сигнала задания мощности, соответствующих изменениям мощности агрегата на 5, 10 и 20%.
Методика проведения испытаний для каждого из перечисленных выше факторов, влияющих на качество переходного процесса, следующая:
изъять блок ИЧ из стойки ЦР (исключить влияние отклонений частоты);
установить переключатели Ти и Кп на внешней панели блока РМ1 в положение предполагаемого малого быстродействия. С помощью задатчика мощности установить выход ЦР и мощности работающих в ГРАМ агрегатов на уровне 2/3 максимальной мощности и подвести ограничитель "сверху" или "снизу" в зависимости от предполагаемого направления изменения мощности. Затем выход ЗМ установить на 5, 10 или 20% больше (меньше) первоначального и отвести резко соответствующий ограничитель (на 10, 20 или 40%). Записать процесс регулирования мощности;
установить переключатели Ти и Кп в положение, соответствующее увеличению быстродействия и провести те же операции.
Обработка осциллограмм сводится к нахождению времени переходного процесса и постоянной времени.
5.3.7. Испытания системы ГРАМ в режиме астатического регулирования частоты.
Испытания следует проводить при возможности выделения ГЭС на работу в изолированном энергорайоне с целью определения наилучшей настройки системы группового регулирования. При этом необходимо регистрировать процессы изменения частоты с помощью самопишущего частотомера. Желательно производить синхронную запись изменений частоты, мощности ГЭС (или агрегата) и открытия направляющего аппарата одного из агрегатов. Нагрузка выделяемого энергорайона не должна превосходить мощность выделяемых на этот район гидроагрегатов ГЭС. Система ГРАМ должна находиться в режиме задания мощности с уставками Ти и Кп для этого режима.
Порядок проведения испытаний следующий:
произвести выделение ГЭС на изолированный район;
установить ручку потенциометра "Статизм" на внешней панели блока регулятора частоты РЧ в положение 5 и перевести ЦР в режим астатического регулирования частоты;
записать переходный процесс и точность поддержания частоты;
изменить (на блоке измерителя частоты ИЧ) уставку частоты на 0,3 Гц в сторону увеличения;
записать процесс регулирования и точность поддержания частоты на этой уставке;
вернуть уставку частоты на панели ИЧ в первоначальное положение;
записать переходный процесс;
повторить операции при изменении уставки частоты на ±0,5 Гц;
установить Ти и Кп в положение, соответствующее увеличению быстродействия, и вновь произвести операции по изменению уставки частоты;
изменить положение переключателя статизма "bp" на РЧ и повторить опыты;
аналогично произвести запись переходных процессов при увеличении быстродействия (уставок Ти, Кп) до получения колебательного процесса.
По результатам обработки осциллограммы и визуальным наблюдениям выбрать оптимальные уставки Ти и Кп, обеспечивающие при работе ГЭС в астатическом режиме приемлемую точность поддержания заданной уставки частоты и устойчивость процесса регулирования.
При выбранных настройках системы ГРАМ следует произвести длительное (в течение 1 ч) наблюдение по ленте регистрирующего частотометра за точностью поддержания заданной уставки частоты.
5.3.8. Определение запаздывания в прямом тракте системы ГРАМ производится следующим образом.
Опыты по определению запаздывания следует проводить в разомкнутой системе регулирования мощности при подаче на вход системы ступенчатого сигнала. Для исключения влияния от изменений частоты рекомендуется изъять ИЧ из стойки ЦР. При выявлении запаздывания должны осциллографироваться не менее четырех величин: входной сигнал, выход ЦР, открытие НА одного из агрегатов и мощность ГЭС.
Входной сигнал рекомендуется подавать скачком с явно выраженной ступенью порядка 10-15% суммарной мощности работающих агрегатов как в сторону увеличения, так и уменьшения. Для этого достаточно отвести ЗМ в одно из крайних положений, ограничив изменение выхода ЦР ограничителем "сверху" или "снизу".
По осциллограммам определить время запаздывания в ЦР, в агрегатном следящем устройстве (по моменту трогания сервомотора направляющего аппарата) и в объекте регулирования (по началу изменения мощности от начального значения). Если запаздывание системы ГРАМ превышает значение, обусловленное техническим заданием, то при тех же условиях производится осциллографирование изменений выходных величин различных элементов системы ГРАМ.
По результатам этих испытаний выявляются элементы, имеющие повышенные запаздывания.
5.3.9. Определение влияния переходных процессов в отдельных агрегатах на точность поддержания заданной мощности при выбранном быстродействии системы ГРАМ производится следующим образом:
произвести нормальный пуск (останов) агрегата, перевод в режим СК (и обратно) с автоматическим включением (отключением) его в ГРАМ, сбросы нагрузки с агрегата или блока. Во время опыта следует производить запись изменений выхода ЦР, открытия НА и мощности испытуемого агрегата, а также мощности ГЭС.
По результатам испытаний определить максимальное значение временного отклонения мощности от установленного значения и время переходного процесса.
5.3.10. Определение динамической неточности распределения нагрузки между агрегатами следует производить в замкнутой системе регулирования. Во время испытаний руководствоваться методикой определения быстродействия системы ГРАМ при отработке заданной мощности при трех значениях быстродействия, соответствующих максимальному, минимальному и установленному после наладки системы ГРАМ. Производится осциллографирование перемещений направляющих аппаратов и (или) мощностей группы (или всех) гидроагрегатов. Сравнением кривых переходных процессов необходимо определять максимальное расхождение между открытиями направляющих аппаратов и мощностями отдельных агрегатов.
5.3.11. Проверку действия системы ГРАМ при аварийном снижении частоты следует производить во время работы системы в режиме задания мощности изменением уставки корректора частоты на блоке ИЧ. Если схемой автоматики предусматривается автоматический перевод ГЭС в режим астатического регулирования частоты, то непосредственно после изменения уставки частоты должно быть выполнено соответствующее переключение ЦР в этот режим работы.
5.3.12. Для определения скорости набора мощности агрегата при его частотном пуске необходимо произвести пуск агрегата с автоматическим включением его в ГРАМ при повышенной на 0,7 Гц уставке частоты корректором на блоке ИЧ. При испытаниях осциллографируются изменения открытия направляющего аппарата и мощности гидроагрегата.
5.4. Испытания КТС ГРАМ при действии защит и автоматики
5.4.1. Испытания схем защит и автоматики системы ГРАМ производятся по методике проверки правильности функционирования системы ГРАМ (п. 5.1) с воздействием на агрегаты. Для исключения возможных существенных нарушений режима работы ГЭС испытания должны производиться вначале при минимальном числе включенных в ГРАМ гидроагрегатов. В дополнение к перечисленным в п. 5.1 проверкам следует провести нижеследующие испытания.
5.4.2. Действие защит от исчезновения и последующего восстановления напряжения питания следует проверять с помощью коммутационной аппаратуры схемы питания КТС ГРАМ. Во время перерыва питания и после его восстановления фиксируется значение мощности гидроагрегатов, работающих в ГРАМ. Отмечается максимальное отклонение мощности от первоначального значения. Опыты повторяются при нескольких значениях времени перерыва питания от 1 с до 1-5 мин.
5.4.3. Действие устройств автоматики КТС ГРАМ при несинхронном делении ГЭС проверять при имитации срабатывания реле несинхронного деления. При этом на каждой секции ГЭС в ГРАМ должно работать не менее двух агрегатов. При срабатывании реле на испытуемых агрегатах не должно происходить существенного изменения мощности. После разделения системы ГРАМ должно быть проверено правильное функционирование каждой из частей, т.е. нормальное действие ЗМ и корректора частоты ЦР.
5.4.4. Проверка действия защит от исчезновения сигналов задания, от внутренних повреждений в ЦР и других предусмотренных схемой защит должна производиться в зависимости от конкретных особенностей выполнения их в соответствии с инструкциями по проверке защит.
6. МЕТОДИКА НАЛАДКИ УЗЛОВ КТС ГРАМ
6.1. Проверка действия центрального регулятора
6.1.1. Методика наладки центрального регулятора в целом и каждого блока в отдельности с выбором необходимых коэффициентов передачи по трактам регулирования приведена в "Методических указаниях по техническому обслуживанию центрального регулятора системы ГРАМ" (М.: СПО Союзтехэнерго, 1986).
Ниже приводится методика проверки ЦР системы ГРАМ перед вводом его в эксплуатацию.
6.1.2. Перед проверкой необходимо объединить нули у блоков БПР и БПМ, для этого:
объединить перемычкой контакты выходного ряда зажимов в ЦР ХТI:130 и ХТI:140;
объединить контакт ХТI:130 с контактом выходного зажима ХРI-а3 блока БДЗ.
Затем установить в стойку только блоки БПМ и БПР и подать напряжение ~220 В центрального регулятора на зажимы ХТI:133 и ХТI:135.
Вольтметром проверить наличие напряжения +15 В; 0; -15 В
в контрольных гнездах на лицевой панели БПМ и +12 В; 0; -12 В
в контрольных гнездах блока БПР.
Установить блок ЗМ в стойку ЦР и проверить его работоспособность, изменяя с помощью кнопок "убавить", "прибавить" напряжение на выходе ЗМ от 0 до -10 В, что соответствует изменению по прибору на ЗМ от 0 до 1,0 мА. Напряжение на выходе ЗМ измерять в контрольных гнездах 1 и 2 на лицевой панели блока.
Проверить качество хранения информации (проверяется либо по прибору на панели ЗМ, либо по прибору, подключенному к контрольным гнездам 1 и 2). Для этого выставить 0,5 мА по прибору, что соответствует напряжению на выходе ЗМ -5 В. За 15 мин наблюдений показания не должны измениться.
6.1.3. Для проверки последующих блоков необходимо вставить в стойку ЦР блоки БДЗ, РМ6, РМ7, РМ4, РМ1 и РМ2.
Переключатели блока РМ1 "время интегрирования" и "коэффициент передачи" выставить в положение минимальных уставок.
Ручку потенциометра "ограничение сверху" в блоке РМ2 выставить в крайнее по часовой стрелке положение (100%). Ручку потенциометра "ограничение снизу" в блоке РМ2 - в крайнее против часовой стрелки положение (0%).
Выставить на ЗМ какие-либо (небольшие) напряжение на его выходе (в сторону увеличения задания). Предварительно подключить вольтметр в контрольные гнезда 1 и 3 на лицевой панели блока РМ1.
Напряжение на выходе блока РМ1 должно возрасти с постоянной времени интеграла до 10 В, что контролируется подключенным вольтметром или по зажиганию светодиода "ограничение сверху" на лицевой панели блока РМ2.
Изменяя положение ручки потенциометра "ограничение сверху" от 100 до 0% через каждые 10-20%, измерить значения напряжений на выходе РМ1 на каждой ступени.
Для определения времени интегрирования в блоке РМ1 переключатель "коэффициент передачи" поставить в положение "0". С помощью ЗМ установить напряжение на выходе блока РМ4 (в контрольных гнездах 1 и 3) равным 10 В. Включить вольтметр на выход блока РМ1 (контрольные гнезда 1 и 3).
Рукоятку потенциометра "ограничение снизу" установить в положение 0%.
Рукоятку "ограничение сверху" поставить также в положение "0". Затем, быстро отведя рукоятку потенциометра "ограничение сверху" в положение 100%, одновременно измерить секундомером время изменения сигнала на выходе блока РМ1 от -10 до +10 В.
Указанную проверку провести для всех положений переключателя "Время интегрирования". Полученные значения времени должны соответствовать тем, которые указаны на лицевой стороне панели. Установить в стойку ЦР блоки ИЧ и РЧ. На зажимы ХТI:141 и ХТI:143 выходного ряда зажимов подключить генератор промышленной частоты, установив на выходе его напряжение около 20 В. Частоту контролировать частотометром.
Установить частоту генератора равной 50,0 Гц. Ручку потенциометра "Уставка частоты" на лицевой панели ИЧ поставить в положение 50,0.
Подключить вольтметр к выходу ИЧ - контрольные гнезда 1 и 7. Напряжения на выходе ИЧ должно быть равно нулю.
Установить частоту генератора равной 51,0 ГЦ. Стрелка прибора на панели ИЧ должна при этом отклониться в крайнее левое положение, а на выходе ИЧ установится напряжение Uвых.ИЧ = -2 В.
Установить частоту генератора равной 49,0 ГЦ. Стрелка прибора отклониться в крайнее правое положение, а на выходе ИЧ установится напряжение Uвых.ИЧ = 2 В.
Установить ручку "Статизм" блока РЧ в положение 10. Ручку "Уставка частоты" установить в положение 49,0. Частоту генератора установить равной 50 Гц. Вольтметр подключить на выход блока РМ1 на контрольные гнезда 1 и 3. Напряжение на выходе РМ1 должно достигнуть значения -10 В и загореться светодиод "Ограничение снизу".
Ручку "Уставка частоты" установить в положение 51. Стрелка на приборе ИЧ должна отклониться в крайнее левое положение, а сигнал на выходе РМ1 достигнуть значения 10 В и загореться светодиод "Ограничение сверху".
Установить в ячейку ЦР блоки РМ6 и РМ8.
Установить перемычку между контактами ХТI:139 и ХТI:129, ХТI:77 и ХТI:139 выходного ряда зажимов ЦР, при этом ЗМ должен перейти в режим слежения за сигналом фактической мощности.
Устанавливая произвольные значения тока от 0 до 5 А на входе в блок РМ6, измерить вольтметром напряжение на выходе РМ6 и равное ему напряжение на выходе ЗМ.
6.1.4. Для проверки работы ЗМ от устройств противоаварийной автоматики установить на входе блока РМ6 ток, равный нулю, тогда напряжение на выходе блока также должно быть равно нулю.
Подать напряжение 12 В на контакт ХТI:123 выходного ряда зажима ЦР с контакта ХТI:139 на 0,5÷1 с.
Задатчик мощности должен отследить установленный сумматором заданной мощности сигнал. Точность слежения ЗМ контролируется по наличию нулевого напряжения на выходе блока РМ7 (контрольные гнезда 1 и 2).
6.1.5. Установить в ячейку ЦР блок МГА (внутренние перемычки на мнемосхеме внутри блока должны быть установлены).
Установить перемычку (со стороны лицевых панелей блоков) между контрольным гнездом 3 с выхода РМ1 и гнездом 12 МГА.
Вольтметр подключить к выходу МГА - контрольные гнезда 1 и 7 на лицевой панели блока.
Изменяя с помощью кнопок "убавить", "прибавить" выходной сигнал задатчика мощности, убедиться, что на выходе блока МГА напряжение также изменяется.
Отключить вольтметр от блока МГА. Установить перемычку между гнездом 7 блока МГА и зажимом ХТI:44.
Подключить самописец к контрольным гнездам 1 и 3 блока РМ1. Изменяя показаниям ЗМ, наблюдать переходные процессы в замкнутой системе.
6.2. Методика наладки агрегатных следящих устройств
На базе РЧВ типа ЭГР-2И-1
6.2.1. Выход ЦР системы ГРАМ через соответствующий ключ, имеющий два положения - "отключено" и "ГРАМ", подключается к зажимам 9 и 49 внешнего ряда зажимов электрического шкафа ЭГР-2И - штатному входу по сигналу группового регулирования. Этот вход рассчитан на подачу выходного сигнала ЦР в диапазоне от -10 В до +10 В.
Для ввода в ЦР информации о включении - выключении данного агрегата в систему ГРАМ следует использовать контакты 118, 119, 120 реле L5К2, выведенные на внешний ряд зажимов электрического шкафа ЭГР-2И.
Сигнал, пропорциональный открытию направляющего аппарата агрегата, необходимый для ввода его в блок РМЗ ЦР и осуществления "подгонки" ЦР при его первом включении, может быть взят с выхода интегратора (субблок НЗ).
При переводе в ГРАМ гидроагрегата, оборудованного электрогидравлическим регулятором частоты вращения ЭГР-2И, в схеме регулятора автоматически реализуется:
организация цепи задания сигнала от ЦР к РЧВ ЭГР-2И через задающее устройство субблока Н5;
отключение воздействия по частоте путем встречного включения ЧЧЭ-1 и ЧЧЭ-2.
Компенсация их сигналов происходит на суммирующем усилителе А2 субблока НЗ;
отключение изодрома и превращение его в пропорциональное звено шунтированием конденсатора С1 усилителя А1 субблока НЗ.
На базе РЧВ типа ЭГР-1Т ("Ритм")
6.2.2. Для автоматического превращения регулятора частоты вращения в следящее устройство и подключения его к схеме ГРАМ используется штатное реле Р8 (Электрическая схема РЧВ типа ЭГР-1Т "Ритм"). Для коммутации в схеме автоматики ГРАМ обмотка реле Р8 отключается от внутренних цепей и выводится на внешний ряд зажимов регулятора.
Информация о включении-выключении в ГРАМ агрегатного следящего устройства НО контактном реле Р20 также выводится на внешний ряд зажимов шкафа регулятора.
Сигнал пропорциональный открытию НА для схемы "подгонки" ЦР снимается с потенциометров R702 и R704. Для получения знакопеременного сигнала движок потенциометра R704 отсоединяется от привода к механизму ограничения открытия, а на зажим 736 выводится средняя точка потенциометра (рис. 1, б).
Выходной сигнал центрального регулятора подается через штатный вход ЭГР-1Т "сигнал группового" (зажим 25 и 26 рис. 1, а), рассчитанный на входной сигнал от -3 до +3 В. Центральный регулятор ПО "Союзэнергоавтоматика" имеет выходной сигнал в диапазоне от -10 до +10 В, поэтому параметры входных цепей регулятора ЭГР-1Т по тракту группового регулирования должны быть изменены. Для этого на входе в штатные цепи субблока СБП ГСС может быть установлен делитель напряжения, состоящий из двух резисторов R8 и R6, включенных по схеме рис. 1, а.
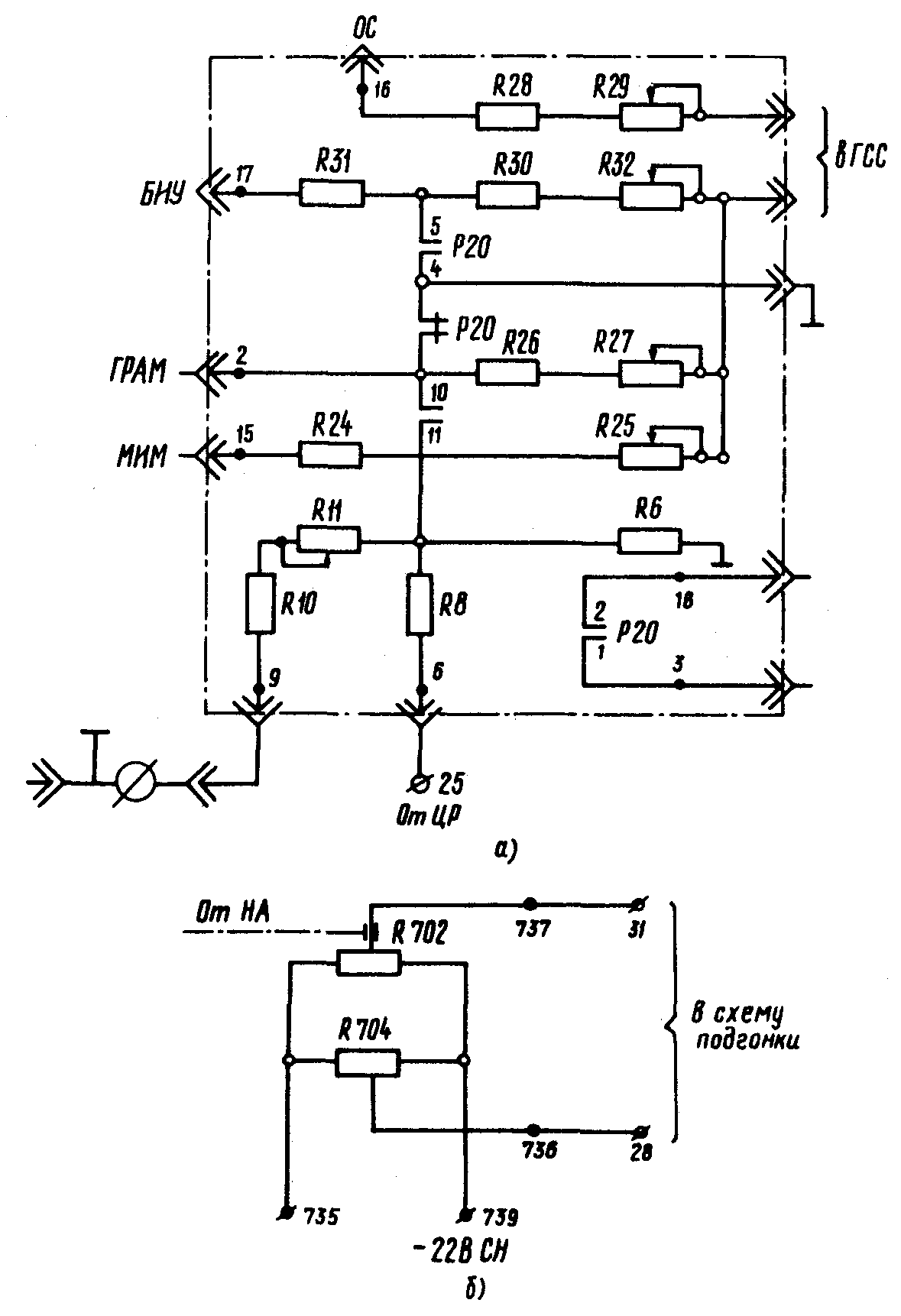
Рис. 1. Схема входных цепей следующего устройства на базе РЧВ ЭГР-1Т "Ритм" по тракту группового регулирования
Согласование выхода ЦР со входом в ЭГР-1Т по тракту группового регулирования можно осуществлять и соответствующим уменьшением коэффициента передачи блока УСЗ в ЦР.
В регуляторе "Ритм", предназначенном для подключения к ЦР (приложение 3), предусмотрено отключение изодрома и частотного контура и использование обратной связи по открытию направляющего аппарата от сельсина Сс701 согласован с входами от БИУ и МИМ при индивидуальном регулировании, то в ГРАМ R29 регулированию не подлежит.
Настройка входных цепей на ГСС и ВСС от МИМ, Сс701 и ЦР производится для обеспечения правильной работы следящей системы регулятора и схемы слежения МИМ при работе в схеме ГРАМ. Настройка может производиться на агрегате, работающем в сети на ручном управлении, либо на установленном гидроагрегате с опорожненной спиральной камерой. В этом случае на регулятор необходимо подать напряжение от постороннего источника, предварительно отключив его от регуляторного генератора, для чего зажимы 41 и 42 в ряду зажимов регулятора следует отключить со стороны кабеля, а на эти зажимы в электрическую схему регулятора подать напряжение через ЛАТР и установить с его помощью 110 В на зажимах 47 и 48.
6.2.3. Установка нулей и диапазона шкал производится в последовательности:
рукоятку ЭГП гидромеханической колонки перевести в положение "ручное";
потенциомер R1 "статизм" установить в положение "10";
с помощью ограничителя открытия установить 50% открытия направляющего аппарата;
переключатели изодрома интенсивности П1, П3 и времени П2, П4 поставить в положение "0";
переключатель П1 поставить в положение "Индивидуальное";
на контрольные гнезда Г1-Г3 блока ЧЧЭ, Г1-Г2 МИУ, Г1-Г2-Г3 ВСС поставить закоротки;
отвести шторки ограничителей на указатели МИМ;
проверить и в случае необходимости установить ноль выхода Сс701 и ноль ГСС (потенциометром R3 субблока СБ22) по нулевому току в ЭПГ;
снять закоротку с контрольных гнезд Г2-Г3 ВСС, на гнезда включить вольтметр и воздействием на ключ МИМ-МИЧ проверить диапазон действия механизма МИМ. Напряжение, измеренное в крайних положениях, должно быть ±14 В, а указатель перемещаться в диапазоне 0-100% (регулируется резистором R2 с СБ12 ВСС);
поставить переключатель П1 в положение "групповое". При изменении выходного сигнала ЦР в пределах ±10 В (±3 В) установить диапазон указателя "групповой задатчик" в пределах 0-100% (регулируются резистором R11 в СБ11 ГСС). При нуле выходного сигнала ЦР указатель должен устанавливаться на 50% и положение МИМ после отслеживания сигнала ЦР - также на 50% (регулируется резистором R29 в СБ11 ВСС, а также R15 в СБ21 ГСС).
6.2.4. Установка коэффициента передачи производится следующим образом:
установить по шкале "групповой задатчик" сигнал от ЦР, соответствующий 60%. С помощью резистора R27 в СБ11 ГСС установить ток в ЭГП, равный 30÷35 мА;
установить по шкале "групповой задатчик" сигнал от ЦР, соответствующий 75%;
открыть направляющий аппарат на 75% по указателю и с помощью R29 в СБ11 ГСС установить ток ЭГП, равный нулю;
проверить положение МИМ, отследившего сигнал ЦР, и в случае необходимости подрегулировать его до уровня 75% с помощью резистора R13 в СБ11 ВСС;
поставить переключатель П1 в положение "индивидуальное" и проверить соответствие МИМ и Сс701. В случае необходимости установить равным нулю ток в ЭГП резистором R25 в СБ11 ГСС;
снять закоротки с гнезд Г1-Г2 БИУ и Г1-Г3 ВСС. С помощью МИЧ установить на гнездах Г1-Г3 напряжение 1 В (или ток в ЭГП 30-35 мА). Поставить переключатель П1 в положение "групповое" и после отслеживания МИМ проверить его положение по шкале. При необходимости установить требуемое положение МИМ с помощью резистора R19 в СБ11 ВСС;
переключением П1 в положение "отключено" и "групповое" проверить "0" ЭГП в обоих положениях переключателя.
На базе РЧВ типа ЭГР-М (ЭГР-2М)
6.2.5. Для автоматического перевода регулятора частоты вращения ЭГР-М в следящее устройство и подключения его к схеме ГРАМ необходимо провести ряд мероприятий.
Для подключения регулятора частоты вращения ЭГР-М к схеме ГРАМ используется штатное реле Р302 типа МКУ-48, обмотка которого заменяется катушкой на постоянный ток 220 В.
Для коммутации реле Р302 с ключом ГРАМ (имеющим три положения: "откл. - подгонка - ГРАМ") обмотка реле Р302 выводится на свободные зажимы внешнего ряда зажимов шкафа регулятора через штекерный разъем ЗК в блоке группового регулирования (рис. 2, а). Ключ К301 (электрическая схема РЧВ ЭГР-М) демонтируется, а для местного подключения - отключения Р302 используется указанный выше разъем ЗК.
Для ввода в ЦР информации о включении-отключении в ГРАМ агрегатного следящего устройства замыкающий контакт 21-22 реле Р301 выводится на внешний ряд зажимов шкафа регулятора через свободный штекерный разъем ЗК (рис. 2, б) и далее посылается в схему ЦР на управляемый делитель РМ7.
В агрегатном следящем устройстве на базе РЧВ ЭГР-2М для его подключения к схеме ГРАМ используется реле Р304. Для коммутации его с ключом ГРАМ схемы автоматики обмотка реле также выводится на свободные зажимы внешнего ряда зажимов шкафа регулятора. Ключ К301, как и в схеме регулятора ЭГР-М, демонтируется.
Информация, посылаемая в ЦР о включении-отключении следящего устройства от схемы ГРАМ, осуществляется с помощью реле Р302 (электрическая схема РЧВ ЭГР-2М).
6.2.6. Выходной сигнал ЦР подается по штатным цепям на обмотки управления 7Н-7К магнитного усилителя через зажимы 067, 069, штекерный разъем ЗК (21-22), контакты 14-15 реле Р301, балластное сопротивление R304 и подстроечное R305 22 кОм (для ЭГР-М, рис. 2, в). Для ЭГР-2М эта цепь проходит через зажимы 084, 086, штекерный разъем ЗК (21-22), контакты 14-15 реле Р302 и те же резисторы R304 и R305.
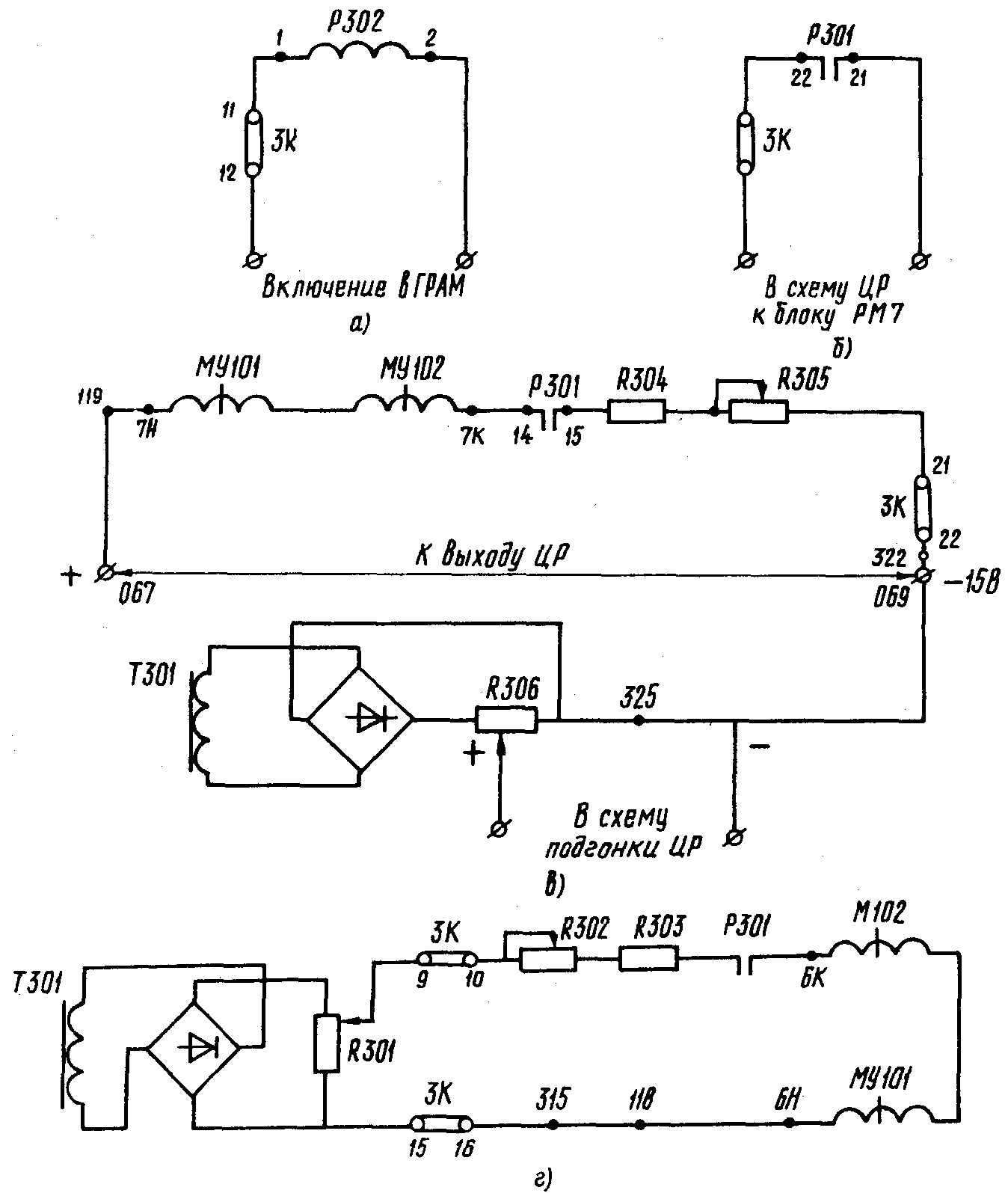
Рис. 2. Схема входных цепей следящего устройства на базе РЧВ ЭГР-М (ЭГР-2М) по тракту группового регулирования
Значение балластного резистора R304 выбирается из условия обеспечения прохождения допустимого тока по обмотке управления. Для ТУМ А-1-11, используемых в РЧВ ЭГР-М, длительно допустимый ток по обмоткам 6Н-6К и 7Н-7К не должен превышать 65 мА.
6.2.7. Сигнал обратной связи подается на обмотку управления 6Н-6К магнитного усилителя аналогично для обоих типов регуляторов частоты вращения через контакты 24-25 реле Р301 (для ЭГР-М), контакты 24-25 реле Р302 (для ЭГР-2М), подстроечное R302 и балластное R303 сопротивления (рис. 2, г).
Значения балластного сопротивления R303 должно быть рассчитано из условия обеспечения обратной связью выключения сигнала задания со стороны ЦР, а также обеспечения статизма по частоте порядка 15-20%, чтобы в значительной степени исключить влияние частоты на качество следящей системы.
Для того, чтобы ошибка в слежении за сигналом ЦР была минимальной, необходимо, чтобы уровень сигнала от ЖОС был значительно больше, чем уровень сигнала по входу частоты.
6.2.8. Для повышения уровня сигнала по ЖОС следует снять максимально возможное напряжение с потенциометра R301 (для чего его движок должен быть установлен в положение "10" по шкале "статизм").
Воздействием на подстроечный резистор R302 и балластное сопротивление R303 увеличить сигнал прохождения по обмотке 6К-6Н, учитывая, что длительно допустимый ток не должен превышать 65 мА.
Информация об открытии направляющего аппарата для осуществления операции "подгонка" ЦР при включении агрегата в ГРАМ выводится на внешний ряд зажимов зажимов каждого шкафа регулятора в виде постоянного напряжения, снятого с потенциометра R306 (рис. 2, в).
6.2.9. Сигнал обратной связи по открытию направляющего аппарата вырабатывается в виде выпрямленного однополярного напряжения, изменяющегося в зависимости от открытия НА. Сигнал же задания от ЦР системы ГРАМ, подаваемый на вход следящего устройства, изменяется в диапазоне от -10 до +10 В.
Для согласования этих сигналов необходимо подачей напряжения смешения превратить выход ЦР в однополярный, для чего необходимо подать от БПМ на вход каждого агрегатного устройства по тракту группового регулирования напряжение смещения -15 В относительно общей точки ОВ. Применительно к агрегатным следящим устройствам на базе РЧВ ЭГР-М и ЭГР-2М необходимо зажим ХТI:138 (-15 В) выходного ряда зажимов ЦР связать с зажимом 069 (для ЭГР-М) и зажимом 086 (для ЭГР-2М), тогда выход ЦР будет однополярным и изменяться в диапазоне от -5 до -25 В.
6.2.10. Цель наладки агрегатного следящего устройства заключается в обеспечении одинакового для всех агрегатов соответствия открытия направляющего аппарата выходному сигналу ЦР. Для этого на вход ЭГР-М, ЭГР-2М по тракту группового регулирования воздействия на ЭМ подается в полном диапазоне напряжение от -5÷-25 В, что должно соответствовать открытию направляющего аппарата от 0 до 100% (кривая 1 на рис. 3).
Сигнал задания на ЦР выключается напряжением, снимаемым с датчика открытия направляющего аппарата R703 (для ЭГР-М), либо с сельсина С702 для ЭГР-2М, характеристика которых нелинейна (кривая 2 на рис. 3). Характеристику 2 условно можно вращать вокруг точки пересечения ее с осью ординат с помощью потенциометра R305, R302. При этом она может занимать положения 2,2' и т.д. С помощью потенциометра R224 и ЭГР-М (поворотом статора С702 в ЭГР-2М) характеристика как бы параллельно смещается. Необходимо рядом последовательных приближений, используя регулировочные потенциометры R305, R302, R224, наложить характеристику 2 на характеристику 1 таким образом, чтобы они пересекались в двух точках, а отличия полученной характеристики 2 от характеристики выхода ЦР 1 по краям и середине были не более 1%.
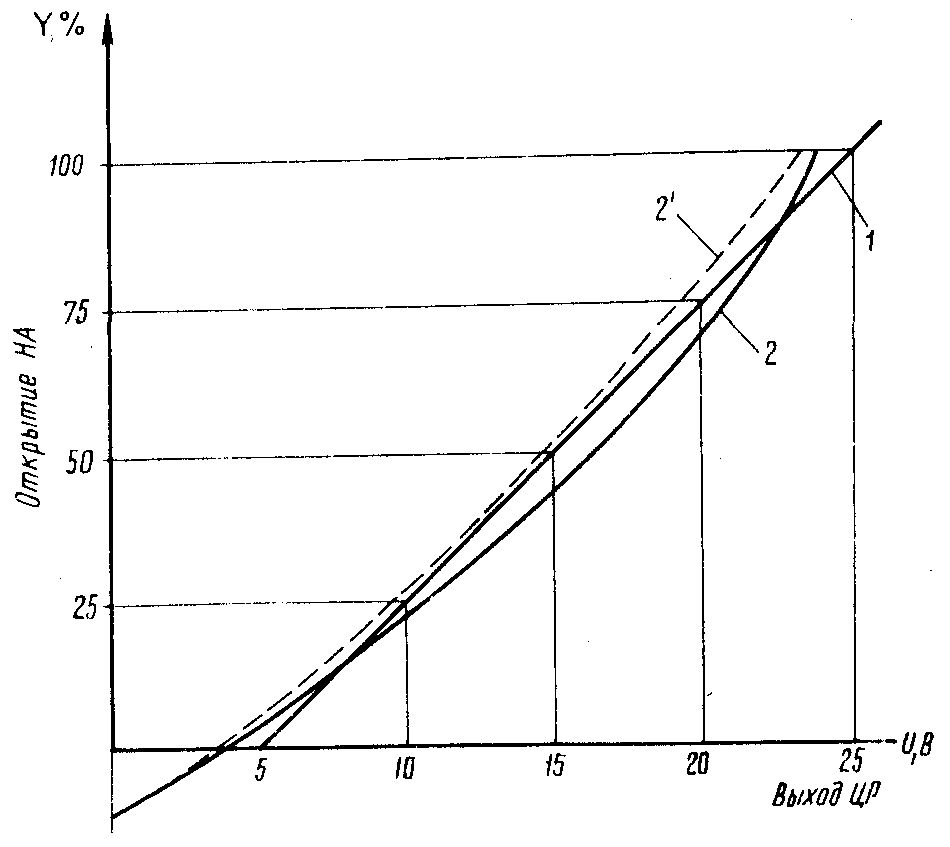
Рис. 3. Характеристика агрегатного следящего устройства
Порядок и последовательность проведения работ по наладке следующие.
Подготовительные операции:
отключить от ЦР КТС ГРАМ все агрегаты и перевести ЦР в режим работы "на модель";
отключить на ряде зажимов колонки регулятора ЭГР-М зажимы 047, 048 (со стороны кабеля) и для ЭГР-2М соответственно зажимы 088, 089; включить на них ЛАТР (со стороны цепей регулятора) и установить на зажимах 053, 054 (для ЭГР-М) и зажимах 058, 059 (для ЭГР-2М) напряжение питания, равное номинальному напряжению регулировочного генератора;
на ряде зажимов ЗК шкафа ЭГР-М и ЭГР-2М соответствующими штекерами задействовать на реле Р302 и Р301, а также цепи задания, ЖОС и "подгонки", вставить штекер ЗК 5-6;
вывести из работы ЧЧЭ, для чего вывернуть штекер 1K11-1K12 для ЭГР-М и отсоединить провод на зажиме 119 для ЭГР-2М;
вывести изодром, для чего переключатель П202 (для ЭГР-М) и переключатель П204 (для ЭГР-2М) поставить в положение "0";
установить на выходе ЗМ-10 В, а рукояткой "ограничение сверху" на блоке РМ2 выход ЦР ограничить до уровня -0,5 мА по прибору на блоке УСЭ;
поставить агрегатный ключ испытуемого агрегата в положение "групповое";
открыть направляющий аппарат с помощью механизма ограничения открытия (МОО) до открытия заданного ЦР, после чего отвести МОО до 100%.
Убедиться в соответствии полярности и уровня сигналов задания и сигналов обратной связи. При нулевом напряжении на выходе ЗМ и -5 В на выходе ЦР открытие направляющего аппарата должно быть равно нулю, а при -25 В на выходе ЦР открытие НА должно установиться 100%.
6.2.11. Уравнивание крутизны характеристик магнитного усилителя по входам от датчика открытия НА и группового регулирования выполняется:
ограничителем "сверху" на блоке РМ2 выход ЦР установить последовательно -0,5; 0; +0,5 мА по прибору на блоке УСЗ и зафиксировать открытие НА по указателю на гидромеханической колонке. Построить полученную характеристику и с помощью потенциометров R305 (наклон для обоих типов следящих устройств) и R224 (смещение - для ЭГР-М) рядом последовательных приближений привести ее к требуемой;
подсоединить ЧЧЭ, для чего ввернуть штекер 1K11-1K12 (для ЭГР-М) и подсоединить провод к зажиму 119 (для ЭГР-2М). При этом характеристика может параллельно сместится. Потенциометром R224 (для ЭГР-М) и R273 (для ЭГР-2М) вернуть ее в прежнее положение (смещение характеристики замечается по изменению открытия НА, а возвращение - установлением исходного значения открытия НА).
6.2.12. Наладка слежение МИЧ (МИМ) за сигналом группового регулирования:
агрегат перевести на ручное управление. На ряде зажимов ЗК разобрать цепь на реле Р302 (для ЭГР-М) и на реле Р304 (для ЭГР-2М) и с помощью временной закоротки собрать эти цепи. Отсоединить ЧЧЭ. На выходе ЦР установить сигнал произвольного значения. С помощью МОО установить такое открытие НА, при котором на балансном приборе (БП) на колонке регулятора установится нулевое значение. Снять установленную закоротку; если при этом наблюдается отклонение стрелки БП, то вновь установить закоротку (агрегат включается в ГРАМ) и потенциометром R223 (для ЭГРМ) сместить указатель положения указатель положения МИЧ (по часовой стрелке, если БП отклоняется на "убавить"). При снятии закоротки стрелка не должна отклоняться;
агрегат перевести на автоматическое управление и проверить отсутствие изменения открытия НА при отключении ГРАМ (снятие закоротки);
подключить ЧЧЭ. Если частота в сети равна резонансной частоте LC-контура, то изменения открытия НА не должно быть. При частоте в сети, отличной от резонансной, изменение открытия будет разным при работе гидроагрегата на индивидуальном РЧВ и при работе с использованием РЧВ в качестве следящего устройства (работа в ГРАМ), причем в последнем случае изменение открытия НА должно быть как минимум в два раза меньше, чем при работе на индивидуальном РЧВ. Только в этом случае влияние частоты будет существенно уменьшено.
При наладке схемы "подгонки" ЦР при включении ЭГР-М в ГРАМ нелинейность характеристики обратной связи не имеет существенного значения, поэтому наладка схемы "подгонки" заключается в том, чтобы с помощью Р306 при 50%-ном открытии направляющего аппарата установить -15 В сигнала, посылаемого в схему подгонки ЦР (блок РМЗ).
На базе гидромеханических РЧВ типа УК и РК
6.2.13. Одним из вариантов построения следящего агрегатного устройства на базе РЧВ типа УК и РК является способ воздействия через механизм изменения скорости вращения МИЧ с использованием сопрягающих устройств в виде сумматора усилителя, куда наряду с регулирующим сигналом КТС ГРАМ поступают сигналы обратной связи по положению направляющего аппарата (ДО) и выходу редуктора МИЧ (ДП).
Наладка агрегатного следящего устройства такого типа сводится в основном к обеспечению однозначной зависимости открытия НА от сигнала задания центрального регулятора системы ГРАМ.
Порядок проведения работы:
агрегатные ключи "ГРАМ - индивидуальное" поставить в положение "индивидуальное";
подать напряжение питания на датчики обратной связи и убедиться в согласованности их включения. При воздействии на МИЧ на "прибавить" и последующем открытии НА напряжение датчиков ДО и ДП, а также сумма их напряжений должны возрастать, а при действии МИО на "убавить" - уменьшаться.
При использовании в качестве датчиков ДО и ДП сельсинов типа БД-1404 убедиться, что при полном ходе сервомотора направляющего аппарата от двигателя МИЧ оба датчика поворачиваются на 60°, а диапазон изменения выходного напряжения изменяется линейно от нуля до напряжения (определяемого выбранным коэффициентом передачи) при полном открытии НА;
согласно предварительному расчету установить необходимый коэффициент передачи сигналов обратной связи. При использовании на выходе центрального регулятора однополярного сигнала на вход блока ввода сигналов агрегатного следящего устройства от датчиков обратной связи должен поступать сигнал в том же диапазоне изменения напряжения, но обратной полярности.
6.2.14. Опробование действия следящего устройства от сигнала ЦР:
сервомотор направляющего аппарата с помощью ограничителя открытия установить в положение, соответствующее открытию холостого хода;
установить с помощью ЗМ кнопками "больше", "меньше" на выходе блока РМ1 ноль напряжения (контрольные гнезда 1 и 3);
Проверить, что выход с датчиков обратной связи также равен нулю;
Поставить агрегатный ключ "ГРАМ-индивидуальное" в положение "ГРАМ" и незначительно отвести ограничитель открытия на колонке РЧВ. При этом не должен работать двигатель МИЧ и, следовательно, открываться НА;
установить с помощью ЗМ кнопками "больше", "меньше" на выходе ЦР сигнал, эквивалентный 20%-му открытию НА. Должен работать двигатель МИО и направляющий аппарат открыться также на 20%.
последовательно, ступенями по 20%, открыть направляющий аппарат на 100%. В случае несоответствия открытия НА сигналу задания отрегулировать коэффициент передачи по обратной связи до полного соответствия открытия НА сигналу задания.
Снять прямой и обратный ход зависимости "задание - открытие НА".
6.3. Указания по наладке агрегатных датчиков и сумматоров мощности
6.3.1. Мощность каждого гидроагрегата измеряется датчиком мощности (ДМ). Выходные сигналы ДМ суммируются в стационарном преобразователе измерительном суммирующем (ПИС), образуя сигнал Рф, который используется в качестве главной обратной связи системы ГРАМ.
В качестве датчиков мощности используются измерительные преобразователи активной мощности (ИП), например такие, как Е748Н/1 -2 и Е748У/1 -2, которые предназначены для линейного преобразования измеряемой мощности трехфазных трехпроводных цепей переменного тока частотой 50 Гц в унифицированный входной сигнал постоянного тока 0-5 мА на нагрузке от 0 до 2,5 к (для ИП.Е748/1) и 0±5 мА (для ИП.Е748/2).
Преобразователь измерительный суммирующий (ПИС) производит суммирование унифицированных сигналов постоянного тока Iвх = 5 мА на входе и выработку такого же унифицированного сигнала Iвых = 5 мА на выходе сумматора.
6.3.2. При наладке системы ГРАМ необходимо согласовать выходной сигнал ПИС со входом сумматора фактической мощности КТС ГРАМ (блок РМ6) таким образом, чтобы при , соответствующем максимальной мощности ГЭС (или группе агрегатов, датчики мощности которых суммируются в данном ПИС), напряжение выхода блока РМ6 равнялось минус 10 В (или той части от минус 10 В, которая пропорциональна мощности группы агрегатов, датчики мощности которых суммируются в данном ПИС). Для этого необходимо подобрать соответствующий резистор R53 в обратной связи микросхемы Д1 (блок РМ6),
7. СРЕДСТВА ИСПЫТАНИЙ, ОБРАБОТКА И ОФОРМЛЕНИЕ РЕЗУЛЬТАТОВ
Рекомендации составлены с использованием материалов "Международного кода для испытаний системы регулирования скорости гидравлических турбин".
7.1. При проведении испытаний следует пользоваться прошедшими периодическую проверку приборам класса точности 0,2-1.
7.2. При проведении повторных испытаний следует пользоваться приборами того же типа и класса точности.
7.3. Для определения изменения скорости в переходных режимах мгновенное значение скорости должно записываться прибором с градуированной шкалой времени вместе с ходом сервомотора и другими регулирующими органами турбины. Регистрирующий прибор должен быть малоинерционным, чтобы обеспечивать измерения мгновенных значений скорости.
7.4. Измерения величин должны производиться по сигналу одновременно всеми наблюдателями и через равные интервалы.
7.5. Диапазон изменения измеряемого значения должен приходиться на всю шкалу прибора. Наиболее верные показания прибора приходятся на вторую половину шкалы.
7.6. Микроамперметры и миллиамперметры следует включать в ту часть цепи, которая заземляется. Следует пользоваться микроамперметрами и миллиамперметрами с малым, а вольтметрами - с большим внутренним сопротивлением.
7.7. Неэкранированные приборы не рекомендуется располагать вплотную один к другому, так как один прибор может влиять на магнитное поле другого.
7.8. При различных измерениях должно быть подготовлено достаточное количество удобных для работы протоколов с четким указанием величин, подлежащих измерению. Примерный вид протоколов приведен в приложении 4.
7.9. Погрешность косвенных измерений (например скорость сервомотора направляющего аппарата) определяется по выражению:
δ(v) = ,
где δу и δt - погрешность прямых измерений перемещения у и времени t.
В свою очередь, прямая погрешность измерения определяется, как
δу =,
где δуo - основная погрешность, равная классу точности прибора; определяется по НТД на прибор;
- суммарная дополнительная погрешность СИ от влияющих величин;
m - количество влияющих величин, вызывающих дополнительную погрешность.
7.10. Погрешности прямых измерений рассчитываются по метрологическим характеристикам средств измерений СИ, приведенным в НТД, и проводятся через масштаб при графическом построении характеристики к зоне действительных измерений.
Пример определения зоны действительных измерений приводится в приложении 4.
Точки, находящиеся за пределами этой зоны, считаются недействительными. Если более четверти всех измеренных точек попадают за пределы зоны разброса, опыт считается недействительным. Действительных точек должно быть не менее 10.
ФУНКЦИОНАЛЬНАЯ СХЕМА КТС ГРАМ ГЭС
Система КТС ГРАМ состоит из центрального регулятора (ЦР), формирующего закон регулирования, куда вводятся сигналы от устройств системного и общестанционного регулирования, исполнительных устройств на каждом гидроагрегате и устройств автоматики и защиты.
Центральный регулятор является основным элементом системы ГРАМ, так как в нем формируется закон регулирования, статические и динамические свойства системы, адаптация системы ГРАМ в различных режимах работы.
Выходной сигнал ЦР по радиальной схеме поступает в регуляторы частоты вращения (РЧВ), превращенные в следящие устройства путем охвата системы "РЧВ - направляющий аппарат НА" глубокой жесткой обратной связью (ЖОС) - рис. 4.
Способы этого воздействия могут быть различными и зависят от типа регулятора, установленного на ГЭС.
В том случае, когда на ГЭС установлены электрогидравлические регуляторы, сигнал управления от ЦР вводится непосредственно в ЭГР на постоянном токе (в ЭГР с усилителем на электронной лампе на каждом агрегате устанавливается блок ввода внешних сигналов).
Для сопряжения ЦР с гидромеханическими регуляторами турбин применяются электромеханические блоки привязки с использованием различного типа усилителей и воздействием как непосредственно на побудительный золотник РЧВ, так и через механизм изменения скорости вращения (МИЧВ, МИЧ).
По способу отработки сигнала возможны два варианта воздействия: с обратной связью по открытию ЦР и с обратной связью по суммарной активной мощности генераторов (рис. 4).
Электрическая мощность генераторов Г, измеренная датчиками мощности ДМ, суммируется в сумматоре мощности ΣР и как обратная связь и по суммарной фактической мощности Рф подается в ЦР, где суммируется (с обратным знаком) с заданной суммарной мощностью Рз ГЭС. В ЦР вводится также сигнал текущего значения частоты fс энергосистемы.
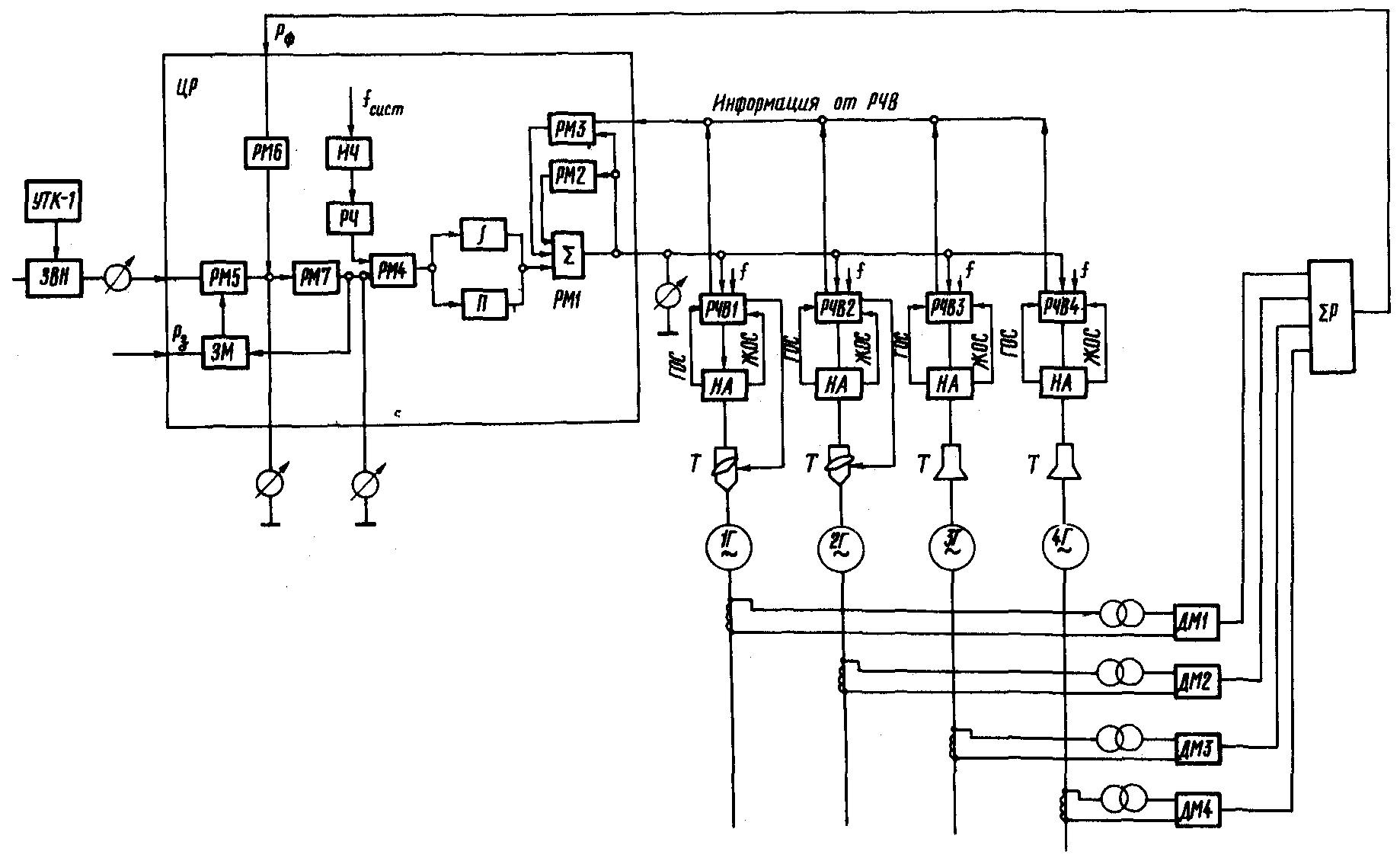
Рис. 4. Функциональная схема системы ГРАМ
Следящая система "РЧВ-НА турбины" и гидроагрегат представляют собой инерционные звенья системы регулирования, а ЦР - пропорционально-интегральный (ПИ) регулятор частоты и мощности. При соответствующих настройках звеньев динамические и статические свойства системы ГРАМ, построенной по такой структурной схеме, определяются параметрами настроек ЦР.
В установившемся режиме при неизменной частоте сети 50 Гц суммарная фактическая мощность Рф равна заданной Рз а на выходе регулятора имеется электрический сигнал, пропорциональный открытию направляющего аппарата. Этот сигнал, поступивший на вход каждого РЧВ, выключается жесткой обратной связью РЧВ.
Таким образом, равенство открытий направляющих аппаратов гидроагрегатов зависит от точности настройки коэффициентов передачи в агрегатном следящем устройстве. Равенство мощностей гидрогенераторов при этом обеспечивается при идентичности характеристик агрегатов "открытие - мощность" и комбинаторных зависимостей для ПЛ-турбин.
При изменении Рз выход ЦР изменяется по ПИ-закону, а агрегатные следящие устройства отслеживают это изменение с постоянной времени инерционного звена. Изменение мощности агрегатов происходит до тех пор, пока суммарная фактическая мощность Рф отличается от заданной Рз. Если при равенстве Рф и Рз происходит изменение частоты сети, то соответственно изменяется выход регулятора и мощность гидроагрегатов. Изменение мощности агрегатов происходит в сторону восстановления частоты и одновременно изменяется Рф. Равновесное состояние наступает, когда сигнал от изменения частоты уравновешивается сигналом от изменения Рф. При этом частота в сети устанавливается отличной от исходной, а Рф не соответствует Рз. Соотношение установившегося значения частоты и фактической мощности определяется заданной уставкой статизма ЦР.
В ЦР от каждого РЧВ вводится информация о включении гидроагрегата в ГРАМ. Поскольку обратная связь в схеме ГРАМ осуществляется по сумме фактических мощностей всех агрегатов - как включенных, так и не включенных в систему ГРАМ, то заданная мощность поддерживается неизменной вне зависимости от количества агрегатов, включенных в ГРАМ, и при изменении мощности агрегата, не включенного в ГРАМ.
Приложение 2
ФУНКЦИОНАЛЬНАЯ СХЕМА ЦЕНТРАЛЬНОГО РЕГУЛЯТОРА
Функциональная схема ЦР представлена на рис. 5. Задатчик мощности ЗМ является статическим устройством с большим временем запоминания выходного сигнала. Управляемый делитель УД, на котором суммируются сигналы сумматоров заданной СЗ и фактической СФ мощности, имеет входы от блока релейного автоматического управления БРАУ, воздействующего так, что его коэффициент передачи автоматически изменяется обратно пропорционально количеству агрегатов ГЭС, работающих в активном режиме, управление которыми осуществляется от системы ГРАМ.
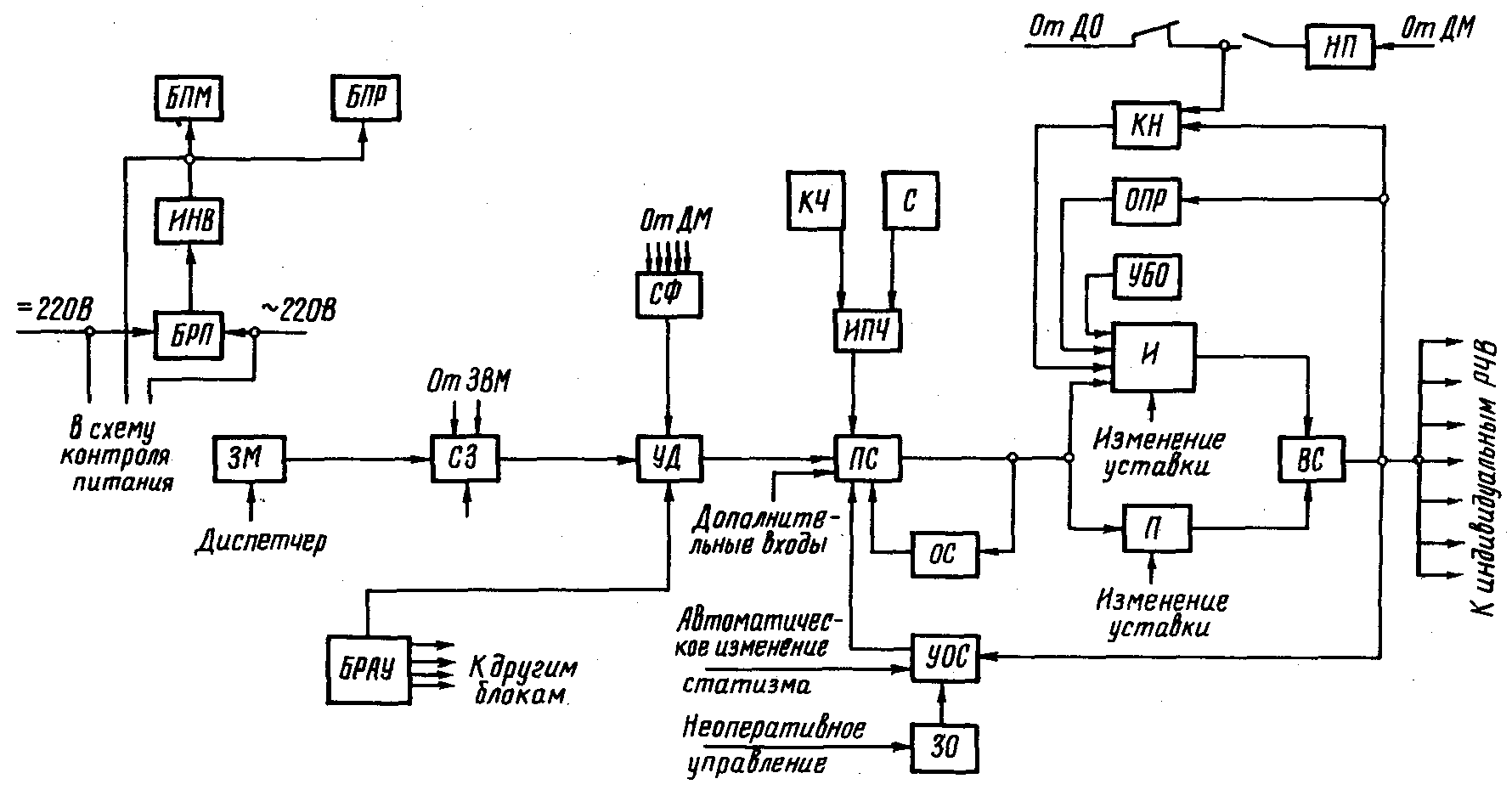
Рис. 5. Функциональная схема ЦР системы ГРАМ
Изменение статизма производится регулированием крутизны выходного сигнала измерителя преобразователя частоты (ИПЧ). Благодаря этому изменение уставки статизма не влияет на коэффициент передачи по мощности и следовательно, на динамическую настройку контура обработки заданной мощности ГЭС. Ввод сигнала отклонения частоты после УД обеспечивает постоянство статизма агрегата по частоте при изменении количества гидроагрегатов, подключенных к ГРАМ.
Автоматическое изменение коэффициента передачи промежуточного сумматора ПС, осуществляемое в устройстве обратной связи ОС, обеспечивает пропорциональное изменение постоянной времени интегрирования и коэффициента пропорционального воздействия ПИ-регулятора динамических настроек системы ГРАМ при изменении режима работы ГЭС (например при выделении ГЭС на изолированный район), сохраняя устойчивую работу ГЭС в изменившихся условиях.
Центральный регулятор снабжен цепями отработки ЗМ разности между уставкой на ней и фактической мощностью ГЭС (автоматическая подгонка или перекладка). Схема используется, например, при включении ЦР в работу для согласования задания с мощностью подключаемых к системе ГРАМ агрегатов или для изменения задания при отключении одного или нескольких гидроагрегатов системной автоматикой для предотвращения перегрузки линий электропередачи.
Регулятор снабжен ограничителями верхнего и нижнего пределов выходного сигнала (ОПР) с возможностью плавного изменения уставки ограничения и сигнализацией исчерпания регулировочного диапазона.
При срабатывании цепей быстрого отвода регулятора (УБО) выходной сигнал ЦР увеличивается до уставки верхнего ограничения. Чтобы включение группового регулятора в работу не вызывало толчка нагрузки, предусмотрен компаратор напряжения КН для согласования выходного сигнала ЦР с фактическим открытием направляющего аппарата турбины.
На вход КН может подаваться либо непосредственно сигнал от датчика открытия ДО направляющего аппарата турбины турбин, либо выходной сигнал нелинейного преобразователя НП "мощность-открытие".
В аппаратуре КТС ГРАМ ГЭС предусмотрены устройство и коммутирующие элементы для обеспечения режима работы ГЭС при ее делении на несинхронные части. Для этого СФМ состоит из двух суммирующих элементов, что создает возможность перехода в несинхронный режим группы агрегатов без толчка нагрузки.
При необходимости осуществлять автоматическое групповое регулирование каждой из разделившихся частей ГЭС предусматривают установку дополнительного группового регулятора, который в нормальном режиме следит за основным ЦР, а при делении ГЭС подключается к отделившейся группе и осуществляет автоматическое групповое регулирование выделившихся агрегатов. При определенных условиях может осуществляться перевод отделившихся агрегатов на индивидуальное регулирование.
Аппаратурой КТС ГРАМ допускается режим работы с обратной связью по среднему открытию. Для этого используются усилитель обратной связи УОС с входом для автоматического изменения статизма по среднему открытию и потенциометрический (неоперативный) задатчик открытия 30.
Когда режим работы группового регулятора с обратной связью по среднему открытию является основным, в качестве оперативного задатчика используется ЗМ. Для этого он должен быть переключен на дополнительный вход промежуточного сумматора ПС.
Работа в режиме регулирования частоты и мощности
Функциональная схема регулятора в режиме регулирования мощности со статизмом по частоте представлена на рис. 6.
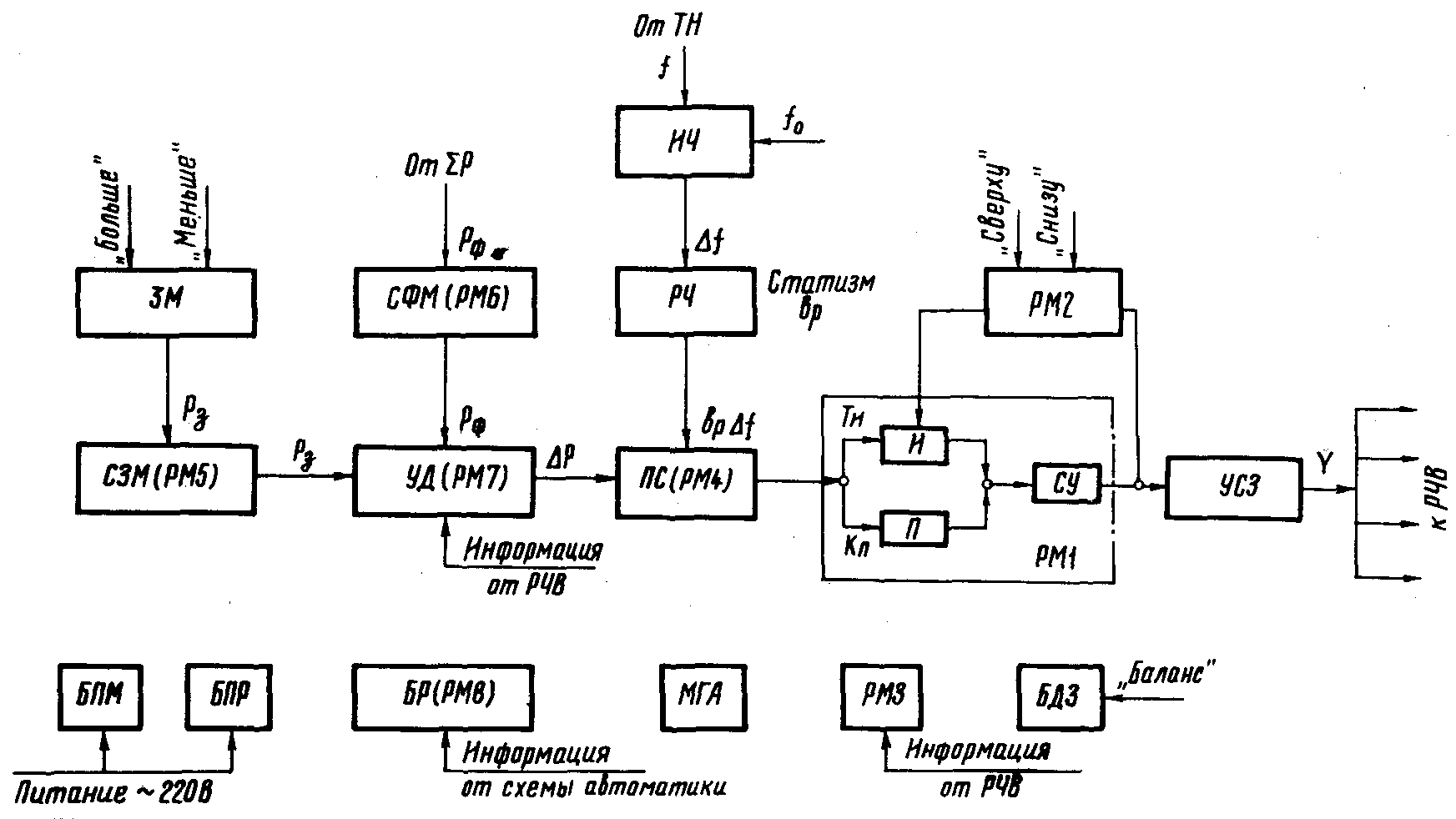
Рис. 6. Функциональная схема ЦР
Сигнал от задатчика мощности ЗМ через сумматор заданной мощности СЭМ (обозначенной на регуляторе как блок РМ5) поступает в управляемый делитель УД (РМ7), где суммируется с сигналом фактической мощности. Сигнал фактической мощности поступает от сумматора (тип Е831/2) через блок сумматора фактической мощности СФМ (РМ6), служащий для согласования токовых цепей сумматора с высокоомным входом УД (РМ7).
В УД поступает также информация от РЧВ агрегатных исполнительных устройств о включении агрегата в ГРАМ или его отключении. С учетом этой информации сигнал разности суммарной заданной мощности Рз и суммарной фактической мощности Рф преобразуется в УД в отклонение мощности на один агрегат ΔР. Этим достигается неизменность динамических свойств системы ГРАМ не зависимо от количества включенных в нее агрегатов.
Сигнал отклонения (изменения) мощности в промежуточном сумматоре ПС (РМ4) суммируется с отклонением частоты от заданной уставки с учетом заданного статизма.
Сигнал отклонения частоты от заданной уставки fo формируется в блоке измерителя частоты ИЧ в виде Δf. В промежуточном сумматоре ПС сигналы ΔР и bрΔf cуммируются (с разным знаком) и, если ΔР = bрΔf, то на выходе ПС будет ноль и регулятор не действует. Это значит, что отклонение частоты в сети компенсировано отклонением фактической мощности от заданной и система регулирования с объектом находятся в равновесном состоянии согласно статической характеристике. При изменении нагрузки в энергосистеме и, следовательно, частоты происходит изменение Δf и на выходе ПС появляется сигнал, который поступает в блок (РМ1), содержащий интегратор И и пропорциональный усилитель П, включенные параллельно. Эти сигналы, пройдя сумматор-усилитель блока РМ1, поступают в блок суммирующего - запоминающего устройства (УСЗ), используемого, в частности, как усилитель мощности выходного сигнала регулятора.
Так как выходной сигнал регулятора выключается в агрегатных следящих устройствах сигналом открытия направляющего аппарата, то выходной сигнал ЦР следует считать пропорциональным среднему открытию Y направляющих аппаратов гидроагрегатов.
Динамическая характеристика регулятора определяется динамическими свойствами звена РМ1 и подчиняется ПИ-закону регулирования, который характеризуется коэффициентом передачи пропорциональной части Кп и постоянной времени интегрирования Ти. Если на входе ПИ звена (на выходе ПС) есть сигнал, то на выходе регулятора сигнал открытия Y изменяется до тех пор, пока по обратной связи изменение мощности и частоты не придут в соответствие с ΔР = bрΔf, т.е. пока сигнал на входе в РМ1 не станет равным нулю. При регулировании частоты по статической характеристике равенство Рз = Рф возможно только при f = fo (Δf = 0), т.е. фактическая мощность соответствует заданной только при частоте сети, соответствующей заданной корректором частоты fо (уставке).
Режим регулирования по системному параметру.
Системное регулирование от ЗВН
Структура системы ГРАМ и центрального регулятора, в частности в режиме регулирования по системному параметру в схеме с обратной связью по суммарной фактической мощности, остается такой же, что и при работе в режиме задания мощности со статизмом по частоте (рис. 4).
Задание внеплановой нагрузки, формируемое на верхнем уровне (в ОДУ, ОЭС) через передающую аппаратуру телемеханики УТК, аппаратуру уплотнения поступает в виде кодоимпульсного сигнала в приемник УТК, где преобразуется в сигнал постоянного тока ±5 мА. Сигнал с УТК поступает далее на вход сумматора-усилителя задатчика внеплановой нагрузки ЗВН.
Задатчик представляет собой следящее запоминающее устройство, состоящее из сумматора-усилителя и интегратора, охваченных жесткой отрицательной обратной связью.
Сигнал ЗВН поступает на один из дополнительных входов сумматора задаваемой мощности РМ5 центрального регулятора.
На вход ХТ1:20 подключается интегральная составляющая, а на вход ХТ1:21 пропорциональная составляющая сигнала задания внеплановой нагрузки. При этом плановое задание нагрузки осуществляется задатчиком мощности центрального регулятора.
Регулирование по системному параметру с отработкой по выходу ЦР
На ряде гидроэлектростанций в Кольской энергосистеме отработка сигнала задания системы ГРАМ производится не по суммарной фактической мощности, а по открытию ЦР. В этом случае структура ЦР отлична от структуры при отработке сигнала задания по суммарной мощности и принимает вид, представленный на рис. 7, а, где блок РМ6 не используется, блок РМ7 выполняет роль не управляемого делителя УД, а согласующего усилителя.
При переводе системы в режим "системное регулирование" также происходит изменение структуры системы ГРАМ (рис. 7, б). Срабатывает реле режимов и производит следующие операции:
отключает выходной сигнал ИЧ и согласующего усилителя РМ7 от промежуточного сумматора РМ4;
подключает выход согласующего усилителя РМ7 к компаратору задатчика мощности и переводит тем самым ЗМ в режим слежения за выходом РМ7;
подключает сигнал системного параметра (выход КТР или УТК) на вход промежуточного сумматора РМ4 (зажим ХТ1:13).
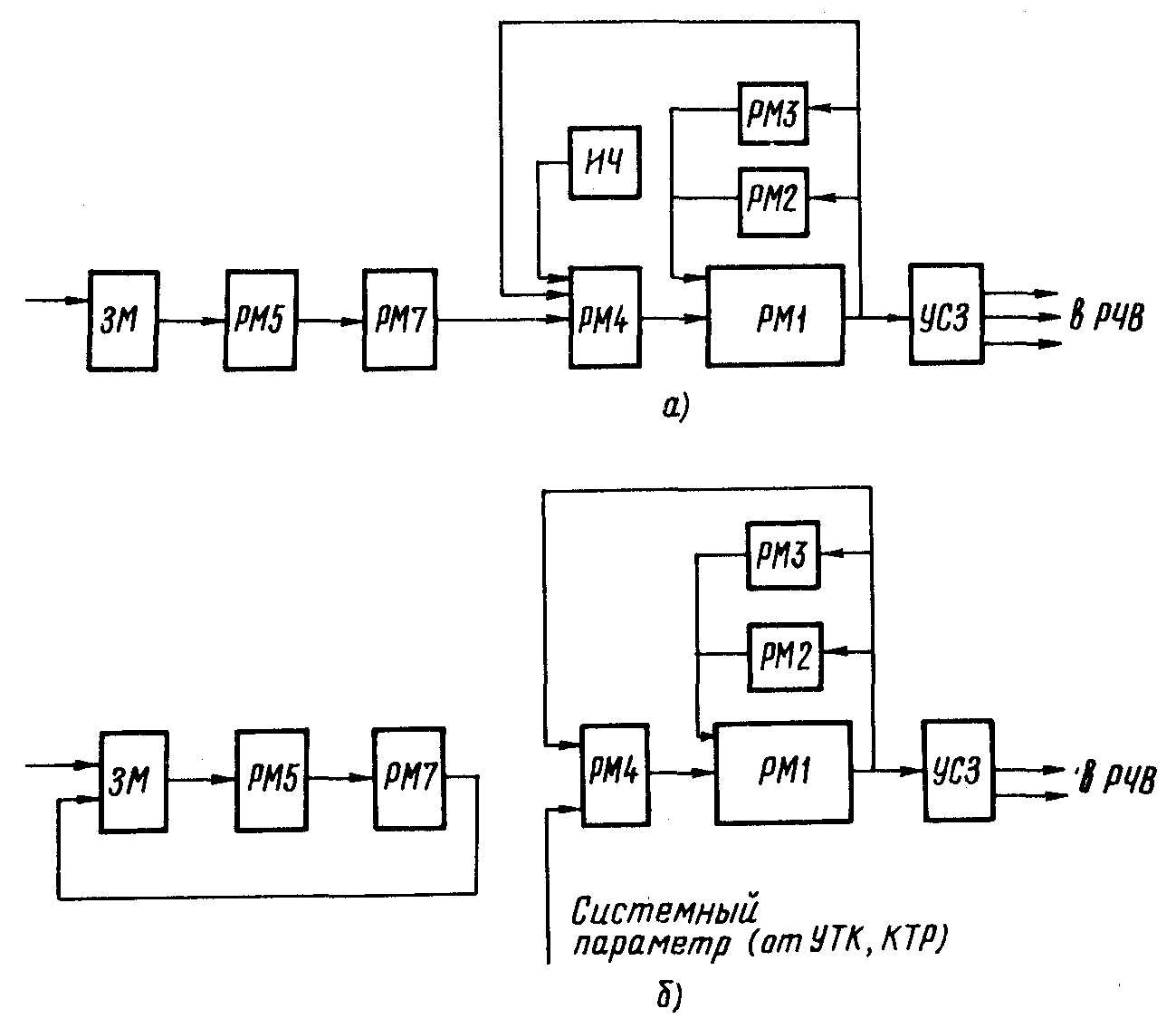
Рис. 7. Функциональная схема ЦР системы ГРАМ с отработкой по открытию ЦР
Системный параметр вырабатывается на ЦДП энергосистемы и представляет собой пропорционально-интегральную функцию отклонений частоты и перетока обменной мощности, и он передается по каналам телемеханики через устройства УТК или КТР в схему ЦР. С помощью УТК или КТР производится как непрерывное регулирование (в заданном регулировочном диапазоне) системного параметра, воздействующего на ЦР и далее на РЧВ гидротурбин, так и дискретно путем передачи сигналов телеуправления на изменение положения командо-аппарата КА системы и, следовательно, на включение (отключение) в определенной очередности гидроагрегатов ГЭС.
Задачей КА, кроме того, является ввод коррекции уставки заданной средней мощности и изменение статизма по сигналу группового регулирования от значения "системного параметра" и числа гидроагрегатов ГЭС, работающих в системе ГРАМ.
Работа ЦР в режиме астатического регулирования частоты
Центральный регулятор переводится в режим астатического регулирования частоты воздействием на блок реле БР (РМ8). При этом (рис. 8) выход УД (РМ7) переключается на один из входов ЗМ, а интегратор последнего переключается на работу как компаратор, ликвидирующий разницу между Рз и Рф (ΔР = 0). ЗМ работает как компаратор (безынерционное звено), поэтому слежение Рз за Рф происходит практически мгновенно и переход обратно в режим регулирования частоты со статизмом происходит без толчка (без изменения выходного сигнала ЦР).
Поскольку в режиме астатического регулирования сигнал ΔР, вырабатываемый в УД (РМ7), отключается от промежуточного сумматора ПС (РМ7), отключается от промежуточного сумматора ПС (РМ4) контактами реле К25, то на вход регулятора мощности РМ1 поступает только сигнал отклонения частоты Δf от уставки. Процесс регулирования заканчивается, когда Δf = 0, и частота соответствует заданной корректором fо, а в системе устанавливается баланс генерируемой и потребляемой мощности в соответствии с этой частотой.
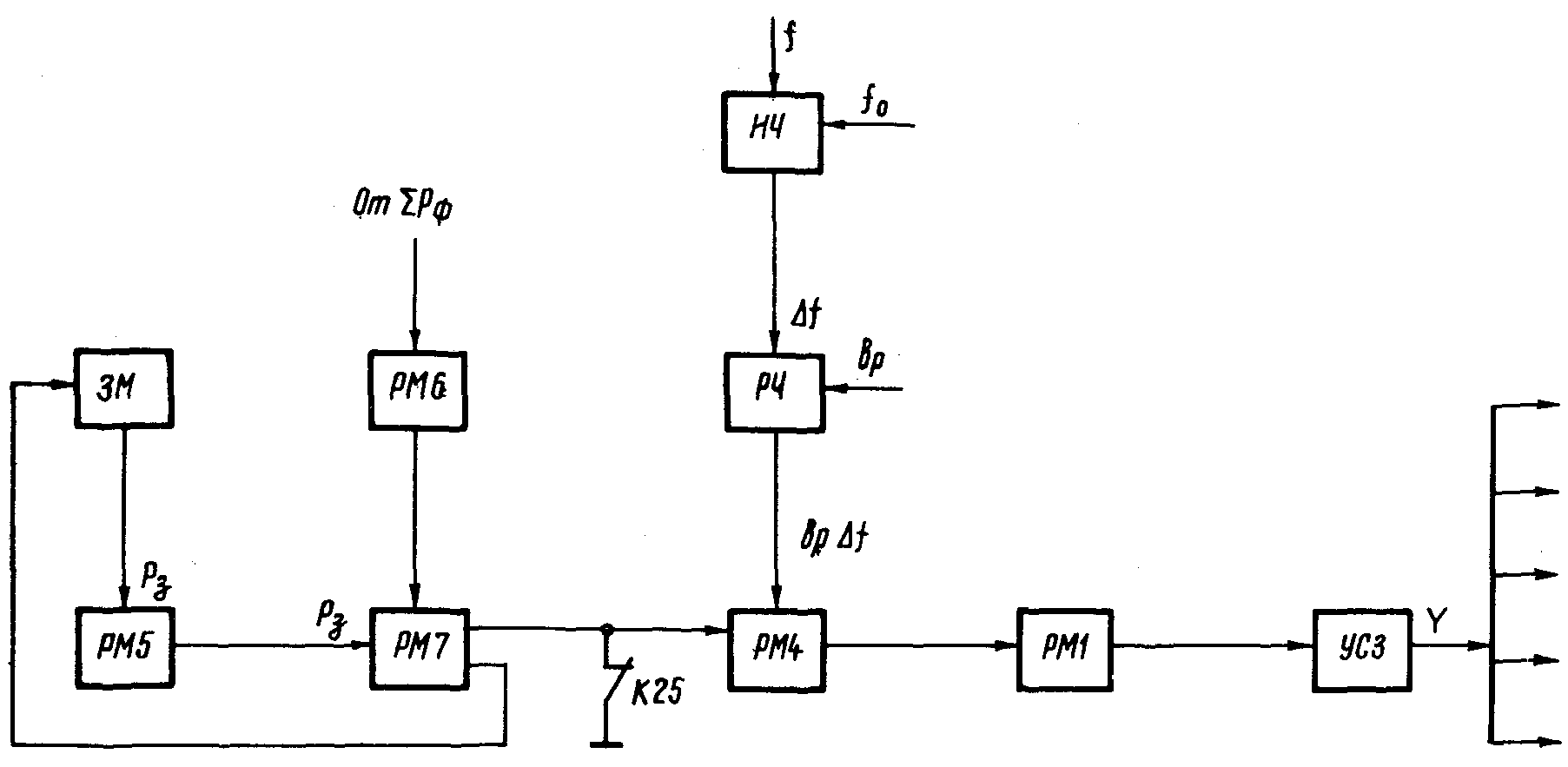
Рис. 8. Функциональная схема ЦР в режиме астатического регулирования
Работа ЦР в режиме "подгонки"
В режиме включения в систему ГРАМ первого агрегата (режим "подгонки" - см. рис. 9) ЗМ так же, как и в случае астатического регулирования, включен в режим слежения за УД (РМ7), т.е. за фактической мощностью, а сигнал рассогласования на выходе УД, появляющейся в процессе отслеживания, отключается от промежуточного сумматора ПС (РМ4) контактом реле К25.
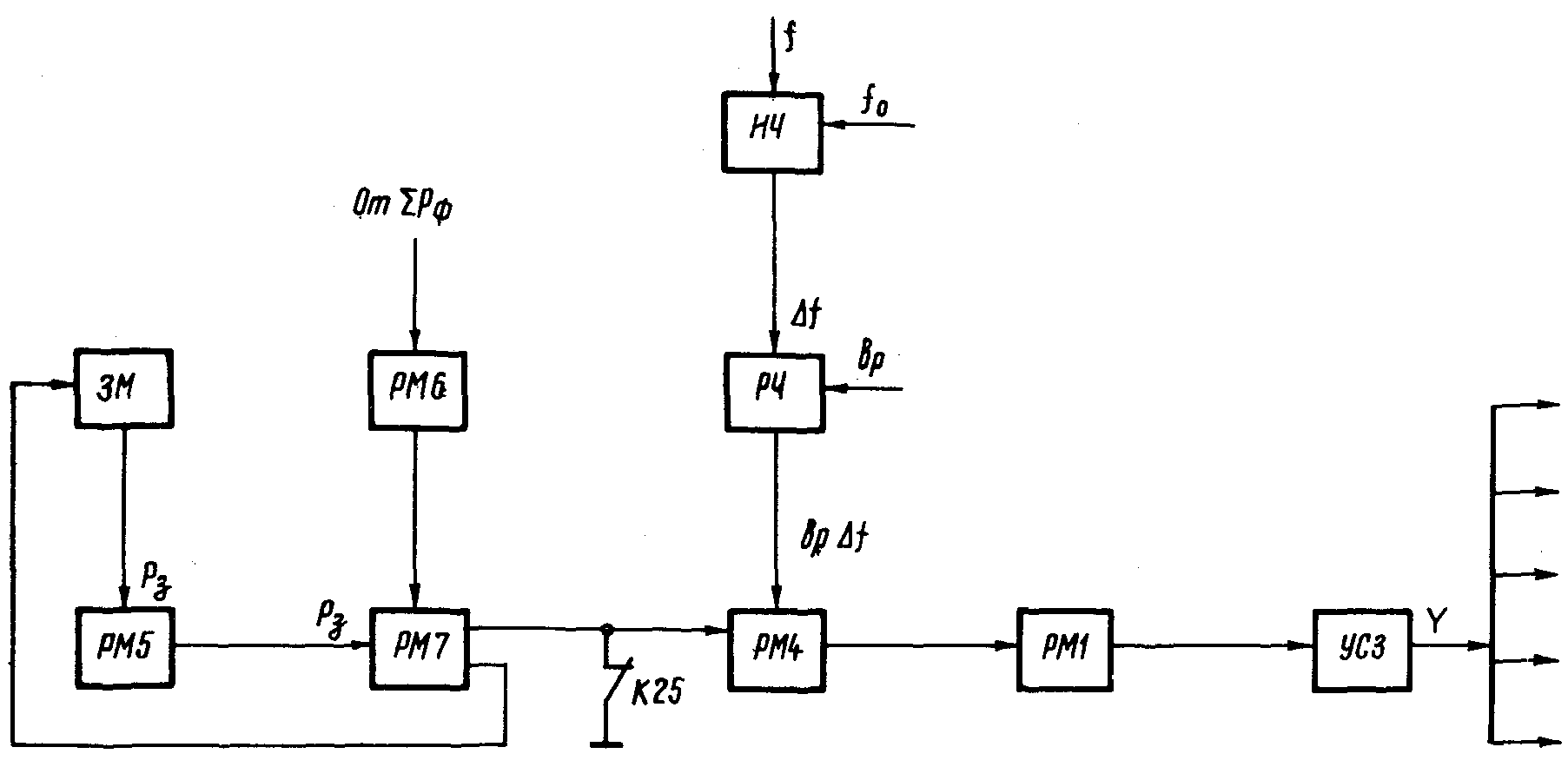
Рис. 9. Функциональная схема ЦР в режиме "Подгонка"
Так как выход регулятора на агрегатные следящие устройства еще не подключен и воздействия от ЦР на агрегаты нет, то даже при незначительном сигнале на входе РМ1 интегратор меняет выход Yв в одно из крайних положений. Чтобы сделать выход ЦР вполне определенным и включить в ГРАМ агрегат без толчка, интегратор РМ1 охватывается глубокой обратной связью - компаратором РМ3, на вход которого подаются сигналы с выхода РМ1 и с датчика открытия ДО (напряжение пропорциональное открытию направляющего аппарата подключаемого агрегата). В этом случае выход ЦР (Y) соответствует текущему значению открытия НА), а мощность Рз равна Рф, поэтому включение агрегата в ГРАМ происходит без толчка открытия и мощности.
Приложение 3
ФУНКЦИОНАЛЬНЫЕ СХЕМЫ АГРЕГАТНЫХ СЛЕДЯЩИХ УСТРОЙСТВ
Одной из задач, возникающих при наладке системы ГРАМ на ГЭС, является согласование центрального устройства системы с индивидуальными РЧВ. Ввиду того, что ГЭС оборудованы различными типами регуляторов частоты вращения, элементы привязки также отличны. Поэтому с точки зрения согласования и привязки РЧВ к КТС ГРАМ, функциональные схемы электрогидравлических регуляторов по типу РЧВ можно разделить на три группы:
ЭГР - на ламповых усилителях;
ЭГР-М, (ЭГР-2М) - на магнитных усилителях;
ЭГР-1Т и ЭГР-2И1 - на транзисторах и интегральных микросхемах.
Функциональная схема агрегатного следящего устройства на базе РЧВ типа ЭГР-1Т ("Ритм")
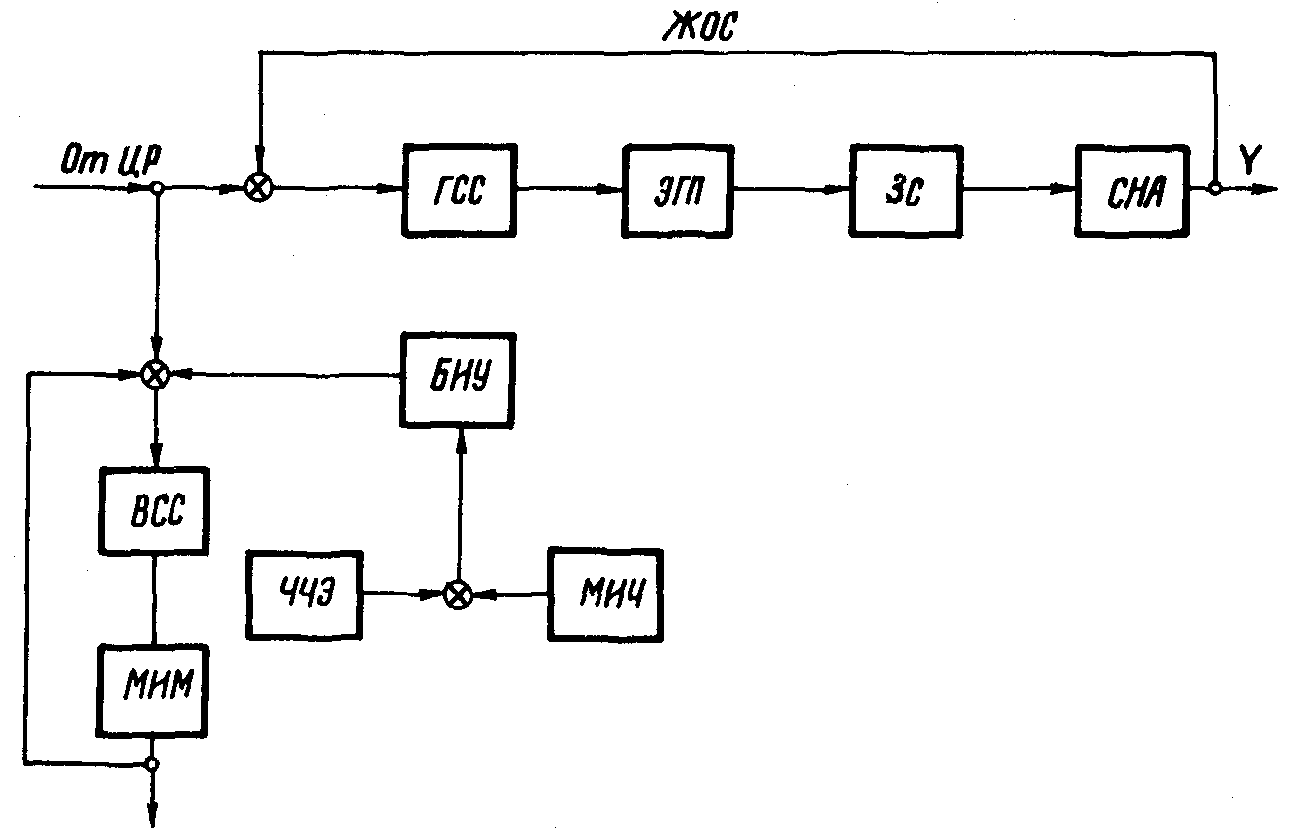
Рис. 10. Функциональная схема агрегатного следящего устройства на базе РЧВ типа ЭТР-1Т "Ритм"
При включении в ГРАМ функциональная схема регулятора ЭГР-1Т принимает вид, представленный на рис. 10.
Сигнал от ЦР поступает непосредственно в сумматор главной следящей системы ГСС, где и выключается жесткой обратной связью ЖОС после обработки его электрогидравлическим преобразователем ЭГП, золотниковой системой ЗС и сервомотором направляющего аппарата СНА. Таким образом, каждому значению Y от -10 до +10 В) выходного сигнала ЦР соответствует Y (0-100%) открытия направляющего аппарата.
При включении агрегата в ГРАМ в его РЧВ частоточувствительный элемент (ЧЧЭ), механизм изменения частоты (МИЧ), блок интегрирующего усилителя (БИУ) со стабилизирующими элементами отключаются от главной следящей системы (ВСС). Вспомогательная следящая система регулятора частоты вращения турбины, включенной в систему ГРАМ, выполняет функции следящего устройства за сигналами от ЦР и БИУ, содержащего сигнал отклонения частоты и уставки МИЧ.
В статике выходной сигнал МИМ должен быть алгебраической сумме сигналов от ЖОС и БИУ, поэтому при включении на вход ГСС сигнала от МИЧ и БИУ (и отключении сигнала ЦР) изменений открытия НА не должно происходить.
Функциональная схема агрегатного следящего устройства на базе РЧВ типа ЭГР-М (ЭГР-2М)
Регулятор частоты вращения ЭГР-М (ЭГР-2М) не предназначен к использованию в схеме ГРАМ с ЦР. В нем не предусмотрено заводской схемой (в отличие от РЧВ типа ЭГР-1Т) отключение изодрома и частоточувствительного элемента (ЧЧЭ) при включении гидроагрегата в систему ГРАМ.
Суммирование сигналов от ЦР, ЖОС, изодрома И и ЧЧЭ производится в магнитной системе магнитного усилителя (МУ), представляющего собой инерционное звено, что ограничивает параметры по входам ЖОС и ЦР.
Следящее агрегатное устройство на базе ЭГР-М, ЭГР-2М представляет собой (рис. 11) менее совершенную схему, чем на базе РЧВ ЭГР-1Т.
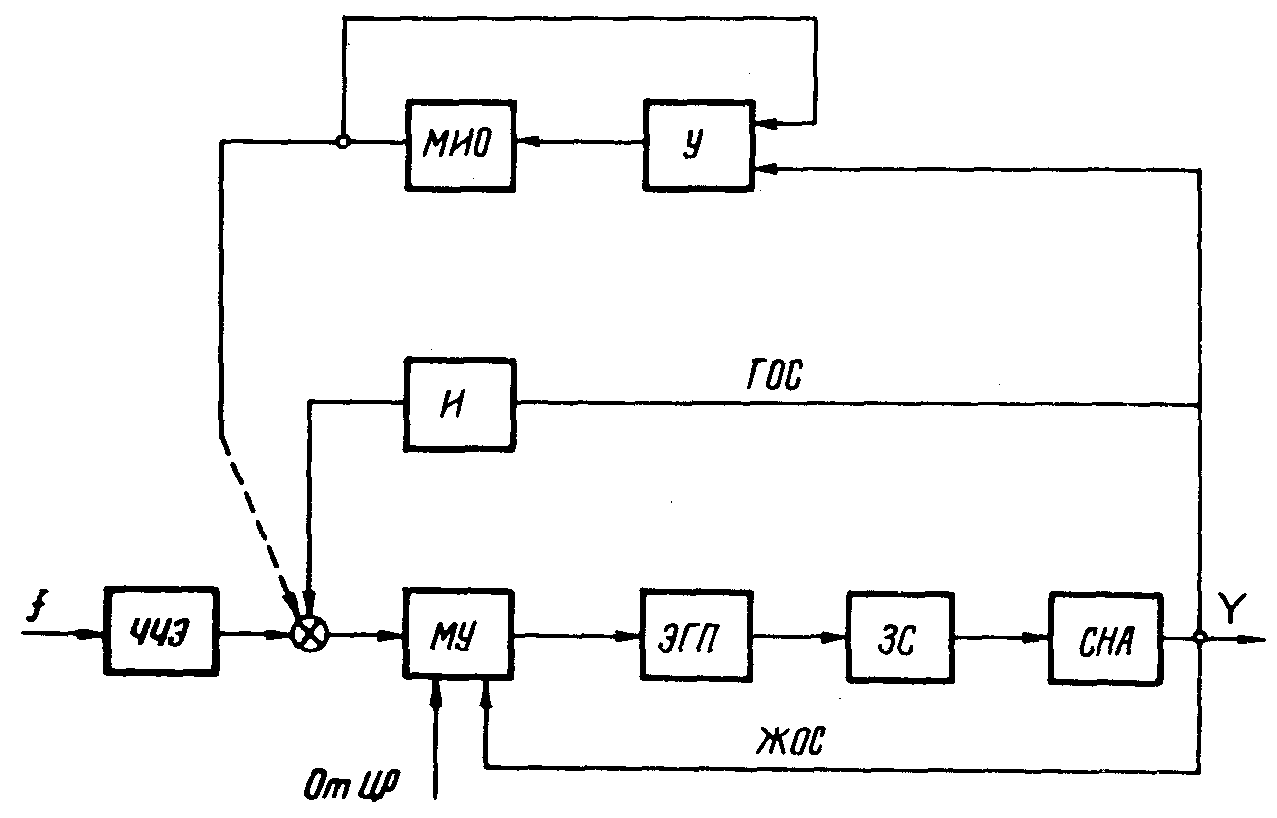
Рис. 11. Функциональная схема агрегатного следящего устройства на базе РЧВ типа ЭГР-М (ЭГР-2М)
Отклонение частоты от номинальной (от резонансной LС-контура) вызывает изменение открытия направляющего аппарата от заданного по входу от ЦР на значение, пропорциональное разности коэффициентов передачи магнитного усилителя по входам от частоты и ЖОС. Следовательно, чтобы ошибка в слежении за сигналом ЦР была минимальной, статизм следящей системы должен быть максимальным, т.е. уровень сигнала по ЖОС должен быть значительно больше уровня сигнала по входу от частоты. Поскольку коэффициент передачи по входу от частоты вполне определен, а увеличение коэффициента передачи по ЖОС ограничено с одной стороны уровнем сигнала от ЦР и устойчивостью контура МУ-ЭГП-ЭС-СНА-ЖОС с другой стороны, то практически увеличение статизма следящей системы возможно до уровня 15-20%, что оказывается достаточным для создания вполне приемлемой точности агрегатного следящего устройства.
Одним из недостатков следящей системы на базе ЭГР-М является осуществление схемы слежения механизма изменения частоты (МИЧ) только за действительным открытием НА. При этом МИЧ отслеживает сигнал ЦР со статизмом 20%, а при отключении ГРАМ на вход МУ включается обратная связь с установленным на индивидуальном регулировании статизмом (от 2 до 10%). Следовательно, при отклонении частоты от резонансной после отключения от ГРАМ должно происходить изменение открытия НА.
Для уменьшения влияния частоты на равенство открытий направляющих аппаратов в следящих системах необходимо обеспечить идентичность характеристик РЧВ и увеличить абсолютное значение статизма.
Функциональная схема агрегатного следящего устройства на базе РЧВ ЭГР на ламповом усилителе (рис. 12)
Для привязки ЦР системы ГРАМ к регуляторам турбин применяется так называемый блок ввода сигнала БВО (рис. 13). Он состоит из трансформатора питания ТП, выпрямителя В, параметрического стабилизатора напряжения R1, V1, V2, представляющих собой источник питания для усилителя V3; усилителя мощности V4, V5 и датчика обратной связи от направляющего аппарата.
Выходной сигнал напряжения постоянного тока ЦР системы ГРАМ подается на V3.
Туда же подают сигнал обратной связи от ДО направляющего аппарата. Выходной сигнал усилителя подается через реле Р на управляющую сетку электронной лампы.
Усилитель V3 охвачен регулируемой обратной связью (R5).
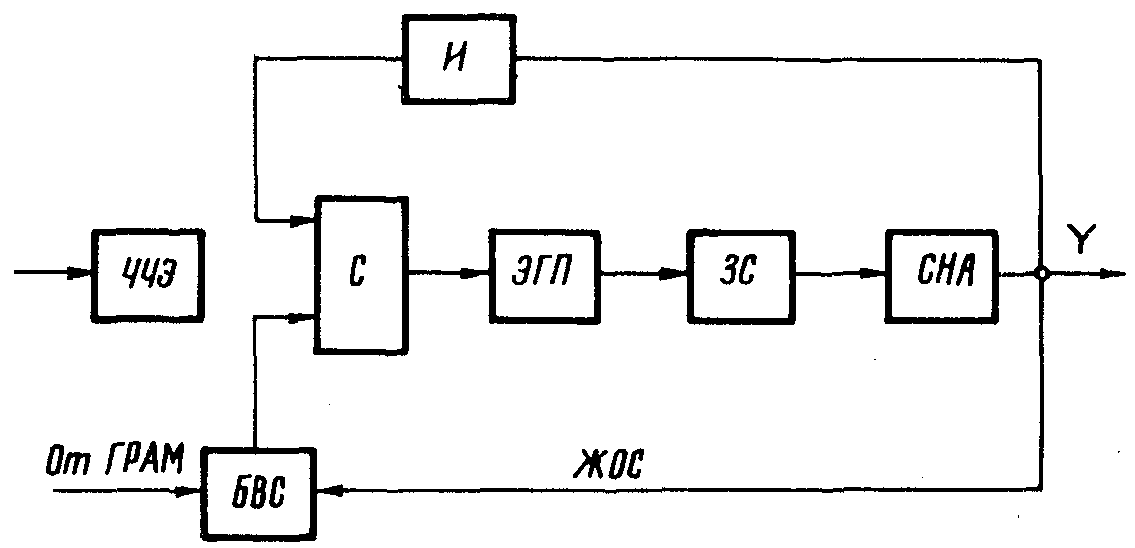
Рис. 12. Функциональная схема агрегатного следящего устройства на базе ЭГР на ламповом усилителе
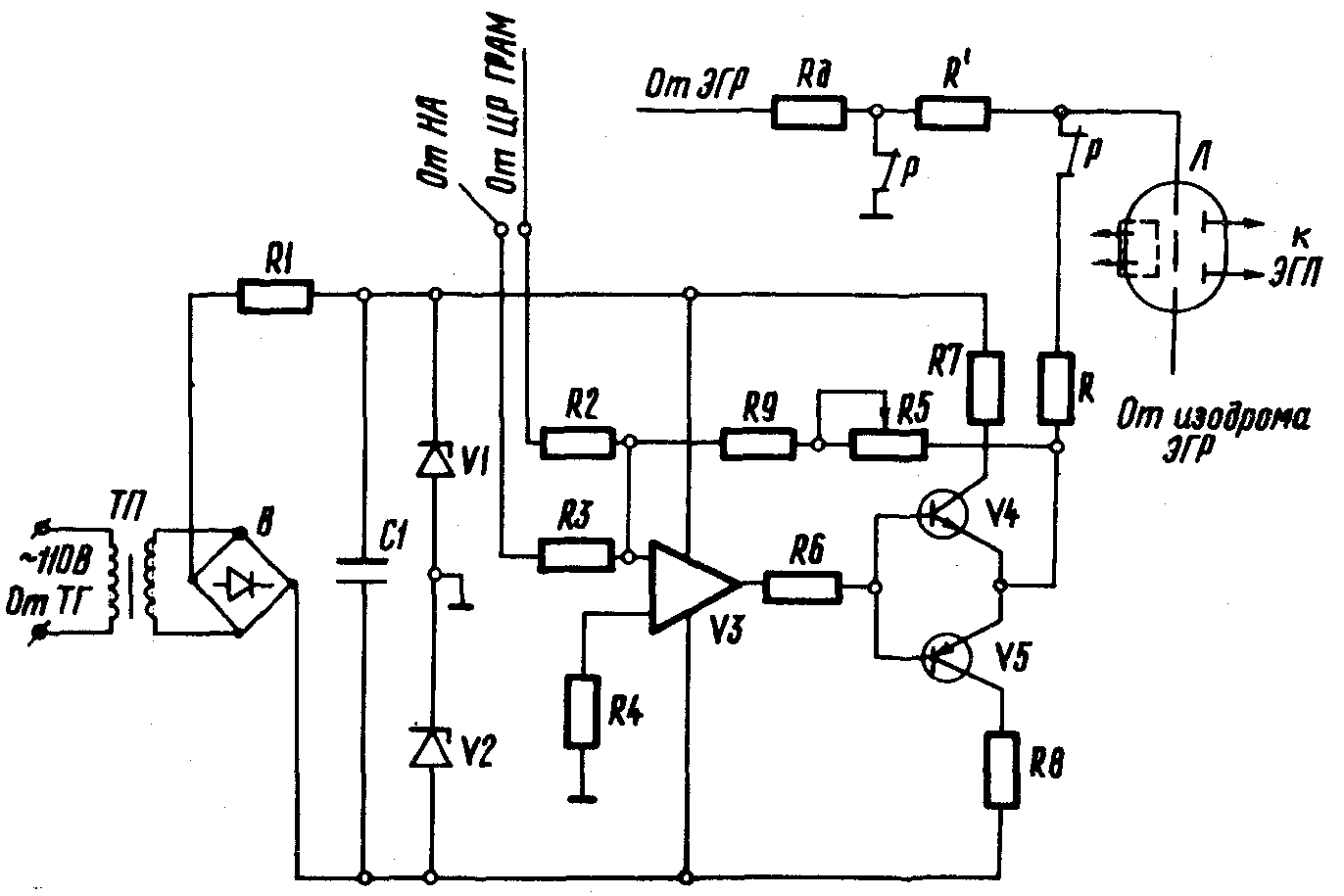
Рис. 13. Блок ввода сигналов для агрегатного следящего устройства на базе ЭГР на ламповом усилителе
Сигналы от выявительной части ЭГР в режиме группового регулирования на лампу не поступают, так как через Rдоб и контакт реле Р группового регулирования они замыкаются на общую точку схемы.
Функциональная схема агрегатного следящего устройства на базе гидромеханических РЧВ типа УК и РК
В эксплуатируемых схемах ГРАМ с использованием РЧВ гидромеханического типа применяются в основном два вида следящего устройства:
с воздействием регулирующего сигнала на гидромеханические регуляторы гидротурбин через их механизм изменения скорости вращения МИО с использованием сопрягающих устройств в виде усилителей (магнитных, транзисторных);
с воздействием регулирующего сигнала на электромеханический блок с последующим преобразованием этого сигнала с помощью гидроусилителя в непосредственное перемещение рычажной системы и побудительного золотника регулятора параллельно ограничителю открытия.
Из рассмотрения функциональной схемы следящего устройства первого типа (рис. 14) видно, что сигнал задания ЦР по мере изменения открытия направляющего аппарата должен выключаться суммой сигналов обратной связи по положению открытия НА (ДО) и выходу редуктора МИЧ (ДП), на исполнительный двигатель которого непосредственно воздействует сигнал задания. Задачей наладки следящего устройства этого типа является подбор соотношения сигналов обратной связи по ДО и ДП и согласование их по уровню и полярности с сигналом задания от ЦР, изменяющегося в диапазоне от -10 до +10 В.
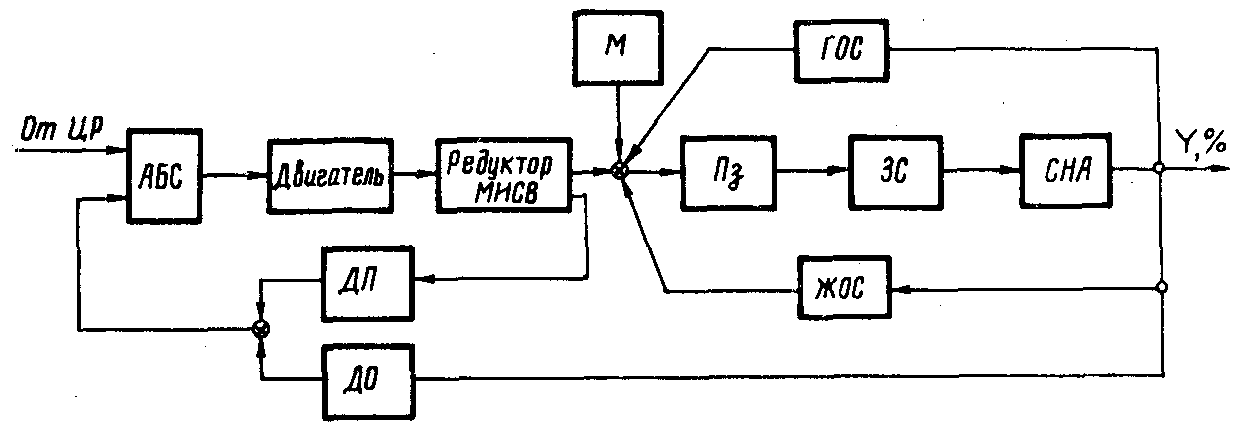
Рис. 14. Функциональная схема агрегатного следящего устройства на базе РЧВ типа УК, РК
В случае использования в качестве датчиков обратной связи сельсинов БД-1404Б следует учитывать, что наибольшая линейность выходной характеристики сельсинов обеспечивается в зоне ±30° поворота их роторов. Поскольку на полный ход направляющего аппарата вал-выключатель в колонке РЧВ поворачивается на 60°, а выходной вал редуктора МИЧ (дополнительный выход с которым стыкуется ДП) на 120°, то привязку сельсинов датчиков ДО и ДП к указанным элементам РЧВ следует выполнить с передачей 1:1 и 2:1 соответственно.
Напряжение, снимаемое с датчиков ДО и ДП, выпрямляется, сглаживается и в виде однополярного сигнала подается в агрегатный блок сопряжения (АБС), представляющий собой сумматор-усилитель, собранный на операционном усилителе.
Суммарный коэффициент передачи по обратной связи должен быть выбран таким, чтобы 100% задания выключалось сигналом обратной связи, возникающим при полном открытии регулирующих органов турбины.
Установка двух датчиков обратной связи обусловлена необходимостью:
обеспечения наибольшего быстродействия следящей системы в схеме с воздействием на МИЧ при сохранении устойчивости процесса регулирования;
создания приемлемого статизма по частоте, чтобы в значительной мере уменьшить влияние изменения частоты на РЧВ агрегата при работе его в схеме ГРАМ.
Для исключения влияния изменения частоты сети на распределение нагрузки между агрегатами при работе их в системе ГРАМ статизм агрегатного следящего устройства на базе РЧВ типа УК и РК равен сумме значений статизма собственно РЧВ и статизма, обусловленного соотношением электрических сигналов датчиков обратной связи ДО и ДП:
bz = bPЧВ + bЭЛ = bPЧВ + К.
Испытания показывают, что при сохранении общего суммарного сигнала, снимаемого с датчиков обратной связи (определяемого выбранным коэффициентом передачи по ОС), отношение сигналов датчиков, обеспечивающие необходимый статизм, должно быть порядка 1,2-1,4.
Использование в качестве исполнительного органа штатного двигателя с воздействием на МИЧ значительно упрощает задачу превращения РЧВ в следящее устройство, но и выдвигает ряд требований по обеспечению точности и скорости отработки сигнала. Одним из мероприятий по увеличению скорости в РЧВ при переводе гидроагрегата в режим работы в ГРАМ.
Воздействие электромеханической следящей системы параллельно ограничителю открытия регулятора гидротурбины (непосредственно на побудительный золотник) приводит к относительной простоте конструкции. Но наряду с этим при исчезновении питания переменным током, когда возникает необходимость перехода в режим индивидуального регулирования, происходит фиксация открытия НА в положении, определяемом электромеханическим следящим блоком в момент исчезновения напряжения питания. Для отвода этого блока в положение, соответствующее полному открытию, необходимо предусматривать специальные автоматические устройства, а для обеспечения бестолчкового по мощности перехода из ГРАМ на индивидуальное регулирование предусматривать схему слежения МИЧ за открытием направляющего аппарата.
Функциональная схема агрегатного следящего устройства с обратной связью по открытию направляющего аппарата для РЧВ типа ЭГР-24-1 при включении агрегата в ГРАМ представлена на рис. 15.
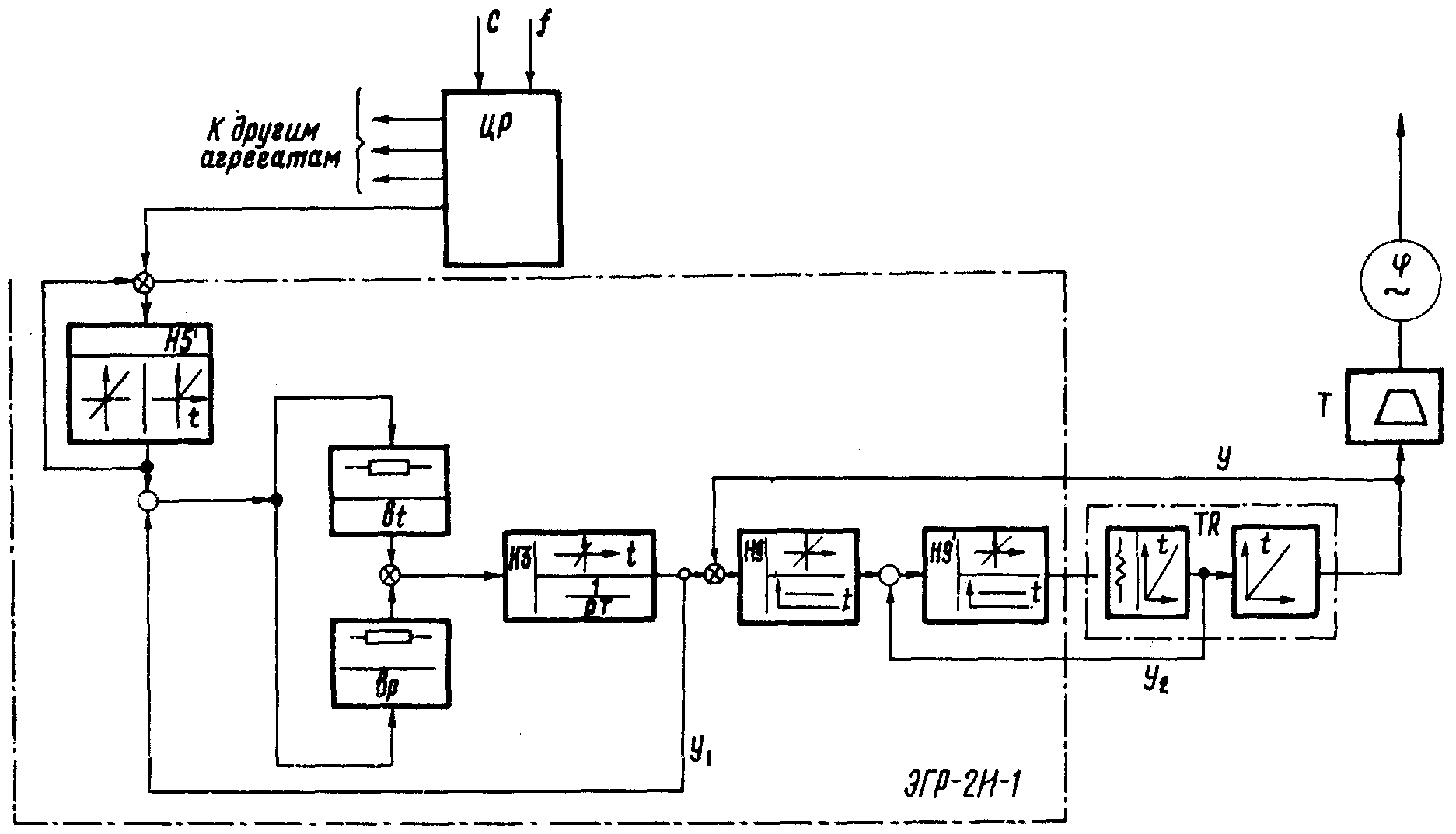
Рис. 15. Функциональная схема агрегатного следящего устройства на базе ЭГР-2И-1:
И3 – интегратор, Н5 – задающее устройство; ТR - ЭГП; Н9 - усилитель
Приложение 4
ПРОТОКОЛ ОПРЕДЕЛЕНИЯ ЗОНЫ ДЕЙСТВИТЕЛЬНЫХ ИЗМЕРЕНИЙ
Объект ___________________ Агрегат ___________ № ___________ РЧВ № _____________
Исполнители:
Прибор | № | Тип | Класс точности | Шкала деления | Предел измерения | Погрешность | Место установки или включения |
Вольтметр | ± ΔU | ||||||
Миллиамперметр | ± ΔI | ||||||
Линейка | ± ΔY |
Прямой ход | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 |
Y, мм | ||||||||||||||
U, В | ||||||||||||||
I, мкА | ||||||||||||||
Обратный ход | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 |
Y, мм | ||||||||||||||
U, В | ||||||||||||||
I, мкА |
Кв = В/%; Кп = мкА/%
За 100% хода регулирующего органа принято ... мм хода.
Мертвая зона в обратной связи jв = ... мкА; jу = ... мм.
При графическом построении характеристик масштаб хода регулирующего органа mу = ... мм/мм; fу = = ... мм.
Масштаб тока (напряжения) mI = ... мкА/мм; fI = = ... мм.
Зона действительных точек f = = ... мм.
Содержание
1. Перечень принятых сокращений
2. Виды и объем испытаний
3. Технические требования к системам ГРАМ
4. Подготовка к испытаниям и наладке условий проведения испытаний
5. Методика испытаний
6. Методика наладки узлов КТС ГРАМ
7. Средства испытаний, обработка и оформление результатов
8. Приложение